
基于捷联惯导系统的舰艇垂向位移测量技术*
2011-10-20 10:55:28王奎民王大海宋万成奔粤阳王国臣
传感技术学报 2011年12期
王奎民,王大海,宋万成,龚 晶,奔粤阳,王国臣
1.海军驻锦州地区军代表室,辽宁 锦州 121000; 2.海军驻大连地区军代表室,辽宁 大连 116001; 3.海军驻沈阳弹药专业代表室,沈阳 110000; 4.哈尔滨工程大学自动化学院,哈尔滨 150001)
捷联惯导系统具有造价低,性能好等诸多优点,随着研究的不断发展,其应用范围越来越广,针对舰艇的应用也会日益增多[1]。现有的捷联惯导系统主要是针对舰艇的姿态信息、定位信息以及速度信息进行测量[2-4]。事实上,舰艇可沿三个坐标轴向运动,具有三个移动自由度,又可绕三个坐标轴作旋转运动,具有三个转动自由度,因此是一个有六自由度的空间运动[5]。在三个沿轴向移动的运动模式中,垂直方向上的周期往复运动,比较两个水平轴方向上的运动更为重要[6]。了解垂向位移信息是提高舰艇操纵性的一个重要手段。目前对于舰艇的操纵性研究已建立了一些较为完善的理论计算方法和试验方法,用于舰艇的初步设计阶段中预报舰艇运动状态[7-9]。但是对于舰艇垂向位移的测量,目前主要是通过外部测速传感器和数学建模的方式完成。通过建模、分析和解出各不同瞬时线运动的微分方程式,并精确估计舰艇和流体之间的相互作用,进而估测下一时间段内舰艇的运动情况。这不仅在数学描述上有很大的困难,而且还存在精度低以及实时性等诸多问题,由于附加预测性信息的输出不能保证与原有导航信息精确同步,从而不能全面描述舰艇的运动状态。如果能够利用高精度的捷联惯导系统,对三轴转动信息和垂向位移信息同时测量,那么就可以更好的将舰艇每一个时刻的全面信息进行较为完整的描述。除此之外,垂向位移信息的引入还有利于舰载飞行器的起降、气垫船登陆、潜器的浅水行使、钻井平台垂向位移补偿装置设计、舰艇补给等许多方面。以下会对舰艇的垂向位移信息定义,以及利用捷联惯导系统测量该信息的机理进行具体阐述。
1 舰艇垂向位移的定义
在研究垂向位移的具体定义前,要先确定描述垂向位移的坐标系。在捷联惯性导航系统中,我们通常会用到载体坐标系b和指向为东北天的地理坐标系t,为了更好的给操作者提供信息,我们选用半固定坐标d来解释垂向位移。半固定坐标系是相对于固定坐标系(地理坐标系)而言的,将地理坐标系转动舰艇的主航向角φ(此信息由舰艇操控者提供)就得到了半固定坐标系。固定坐标系(地理坐标系)与半固定坐标系之间的关系如下:
垂向位移是舰艇在海浪作用下或其它特定情况下的,沿半固定坐标系的z轴作带有一定周期性的往复运动的位移。
2 利用捷联系统测量舰艇垂向位移
垂向位移是沿着半固定坐标系的位移,对其进行测量必须利用捷联惯导系统中测量线运动信息的传感器加速度计。加速度计能够测量的是舰艇载体坐标系b下的比力信息,也就相当于知道了载体坐标系b下的加速度信息。通过坐标转换得到半固定坐标系d下的线速度信息,以及消除解算带来的误差,这是最终得到较为准确的垂向位移信息的关键[10]。
2.1 导航解算对垂向位移测量的影响
载体坐标系与半固定坐标系之间的转换会引入导航系统的系统误差。
捷联惯性导航系统的主要误差源是元器件误差,主要包括陀螺仪常值误差εxεyεz和加速度计零偏误差ΔAxΔAy,列写误差传播方程可以得到其特征矩阵,对其特征矩阵进行分析,可以得到六个特征根:
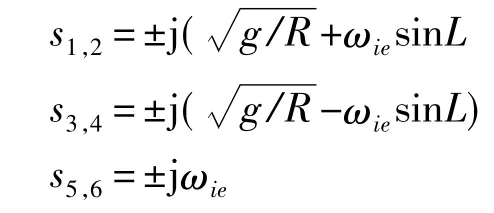
舒勒调谐可通过自控系统中相似原理来实现,并应用于惯性系统中,使平台调谐至具有84.4 min的振荡周期,以便在加速度的作用下,仍能跟踪当地水平面而不受干扰[12]。相比较舰艇1 s~20 s的垂向位移运动而言,它具有周期大振荡幅值大的特点,可以和垂向位移运动进行叠加,在40 min左右的时间段内作为舒勒周期的一部分呈发散状传播。图1中模拟了500 s内,周期为15 s幅值为0.6单位量的信号x,与周期为84.4 min幅值为5单位量的信号y的叠加情况,正如前面所分析的,作为舒勒周期的一部分在短时间内呈现发散状。
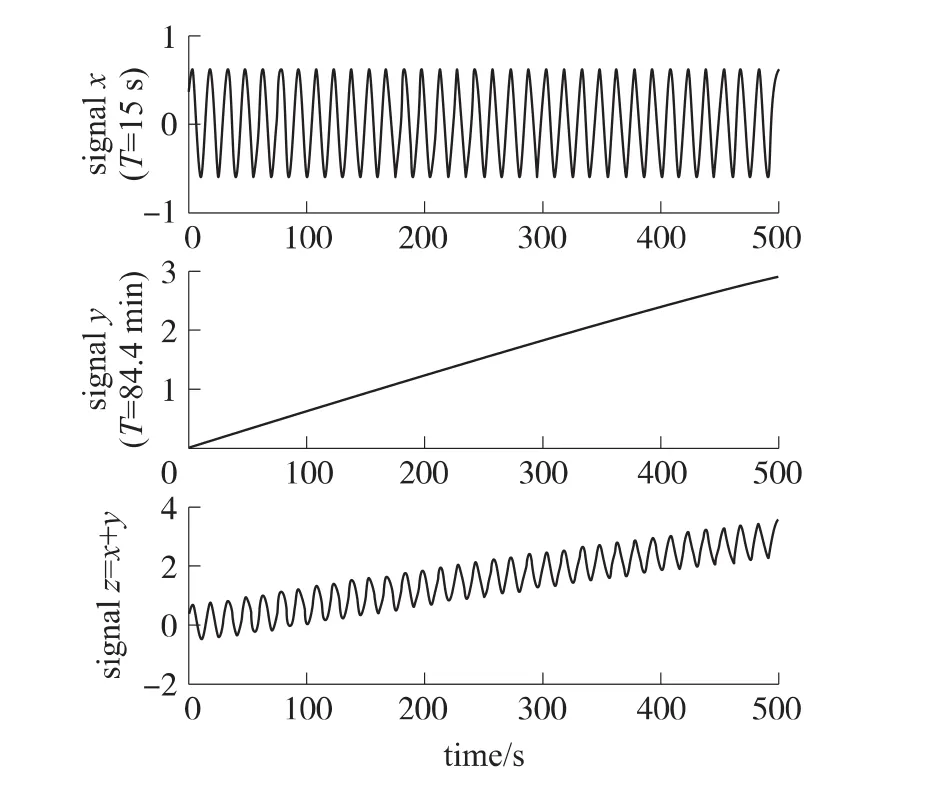
图1 垂向位移与舒勒周期信号叠加示意图
正如图1所示,由于舒勒振荡项的存在使得加速度的输出具有发散特性,由于由加速度信息到垂向位移信息还要经过两次积分,这种发散的特性还会增强,所以如果想要得到更为准确的可用的垂向位移信息,就需要消除舒勒振荡部分。通过引入高通滤波器的方法,将高频的垂向位移信息从叠加信号中分离出来。这也是针对舰艇垂向位移信息测量过程中的重点。
2.2 测量步骤说明
在上文中已经知道了关于舰艇垂向位移测量的两个重要步骤,一个是载体坐标系下的加速度信息到半固定坐标系下的加速度信息的转换,另一个是通过一个高通滤波器消除或削弱舒勒周期振荡项对最后测量结果的影响。下面通过框图的形式将具体的测量步骤进行描述(图2)。
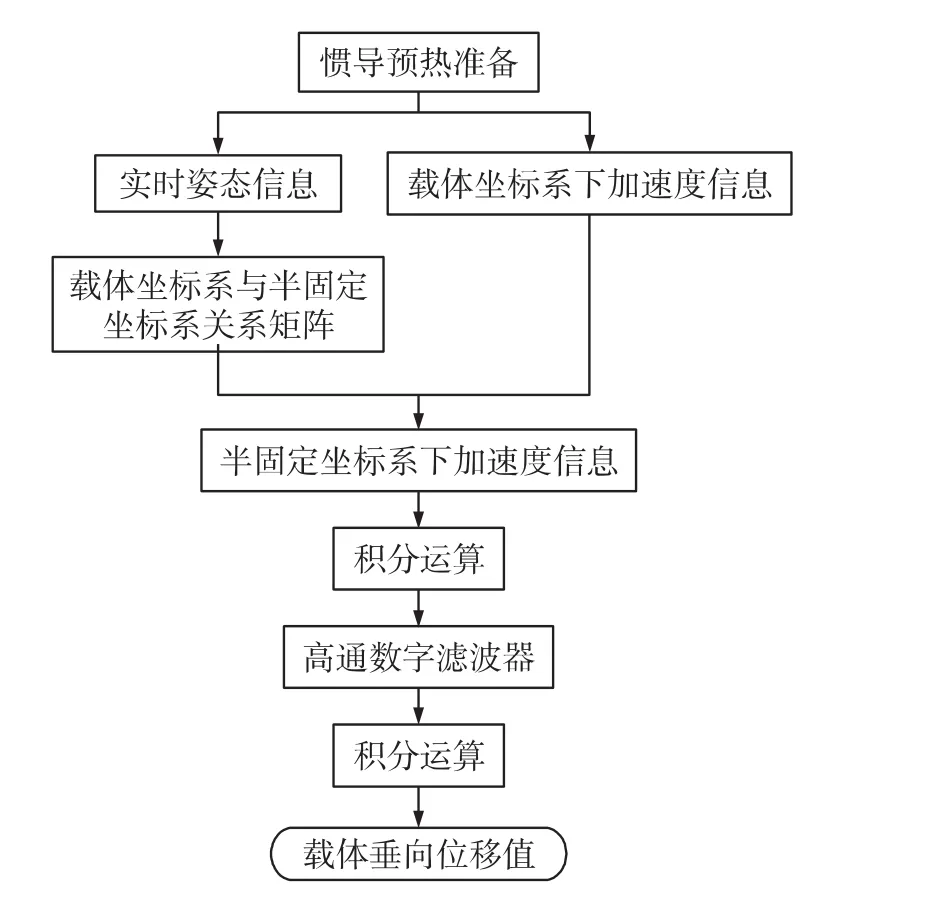
图2 测量流程图
由图2看到,经过一定时间的预热准备,由惯导输出的航姿信息和舰艇操纵者提供的舰艇主航向信息可以得到载体实时的姿态矩阵,结合式(1)得到载体坐标系和半固定坐标系的关系矩阵。由此,可将载体坐标系下的加速度信息转化成半固定坐标系下的加速度信息,并对此信息进行积分,得到半固定坐标系下发散的速度信息。将速度信息引入高通数字滤波器进行处理,将相对低频的舒勒振荡滤除,得到舰艇瞬时垂向速度信息,然后积分得到舰艇垂向位移。
2.3 高通滤波器的选择及设计
2.3.1 高通数字滤波器相关说明
本测量中选用数字滤波器对惯性测量系统输出的信号进行处理。数字滤波器实际上是由一系列滤波系数定义的方程[13]。这些方程构成数字滤波器的程序部分,滤波程序接收原始数据,运算后输出滤波后的数据。使用数字滤波器有助于对惯性测量系统输出的数字信号进行处理。在原有的惯性导航系统解算中,输入量、输出量都是数字量,利用计算机设计数字滤波器可以高效的完成滤波工作。高通数字滤波器的设计步骤可归纳如下:
(1)按照实际要求,确定高通滤波器的性能指标。
(2)寻找一个稳定的因果系统去逼近这个性能指标,即求出数字滤波器的系统函数H(z)或单位冲击响应h(n)。可以按照具体要求选择无限冲击响应(IIR)和有限冲击响应(FIR)两种形式。
(3)采用适当的结构和合适的字长去实现此数字滤波器系统。
(4)验证所设计的系统是否满足给定的性能指标,不满足时对2、3步进行修改。
2.3.2 FIR高通数字滤波器窗函数设计方法
由于IIR数字滤波器将造成有用信号的传输失真,而FIR数字滤波器具有严格线性相位,不存在稳定问题,FIR滤波器的延迟时间是可以计算得到的,也就是可控的,此延迟时间的确定可以更好的辅助分析舰艇的运动特性,是测量中不可缺少的一环,所以本测量方法中主要采用FIR数字高通滤波器。
数字滤波器中的常用的窗函数设计法多从时域出发,用于有限长h(n)逼近近似理想无限长hd(n),然后用窗函数对h(n)加以修正,得到的频率响应H(ejw)逼近理想的频率响应Hd(ejw)。
在多种窗函数中,我们选用凯塞窗,因为其参数可调,适应性更好,滤波效果也较为理想。
长度为N的凯塞窗定义为:

与其它窗函数一样,此范围之外的凯塞窗为零。I0(x)是零阶修正第一类贝塞尔函数,定义为:

一般N取15项~25项就可以满足精度要求。β是一个可选参数,用来选择主瓣宽度和旁瓣衰减之间的交换关系,一般来说,β越大,过渡带越宽,阻带越小衰减也越大。对于一个所期望的阻带衰减值,只要A大于50 dB,β的近似值可以用下面的经验公式得出:

舰艇在海浪中的垂向位移周期一般从1 s左右到30 s左右不等,如果欲得到更为精确的垂向位移信息测量值,需要在不同海浪情况下,变换不同的滤波器,以达到更好的滤波效果。
运用计算机可以很容易的实现高通数字滤波器的设计。例如,MATLAB软件中,可以直接调用凯塞窗函数,进而得到滤波器传递函数的系数组,或者称为其差分方程的系数。同样在该软件中,调用FDA工具,也可以得到适用的滤波器参数。
3 测试试验
前面详细介绍了测量方法,以及测量中的关键技术——高通数字滤波器的设计,下面通过实验的方法来验证本设计是否可行。
利用四自由度平台搭载自研高精度捷联惯导系统做周期性垂向位移运动,对测得的载体加速度信息进行处理,按照设计步骤得到以下信息量:半固定坐标系下的加速度信息a,半固定坐标系下的未经滤波的速度信息v,半固定坐标系下的速度信息v-filter(已通过滤波),垂向位移信息heave。
以设置值的垂向位移幅值0.2 m,振荡周期1.5 s为例,得到半固定坐标系下的加速度信息a图示如图3所示。
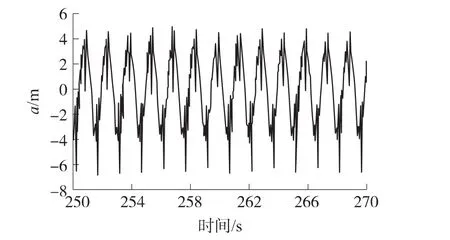
图3 振幅0.2 m周期1.5 s半固定坐标系加速度信息
半固定坐标系下的未经滤波的速度信息v图示如图4所示。
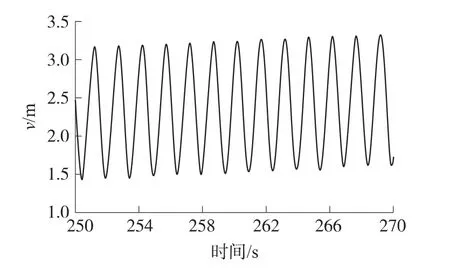
图4 振幅0.2 m周期1.5 s半固定坐标系速度信息(未滤波)
虽然这只是一个局部图,但还是可以从图中看到,速度信息呈发散装,和图1中的叠加信号相类似。以下通过快速傅立叶变换的方法对信号中的周期频率进行分析。得到半固定坐标系下的未经滤波的速度信息v的快速傅立叶分析结果如图5所示。
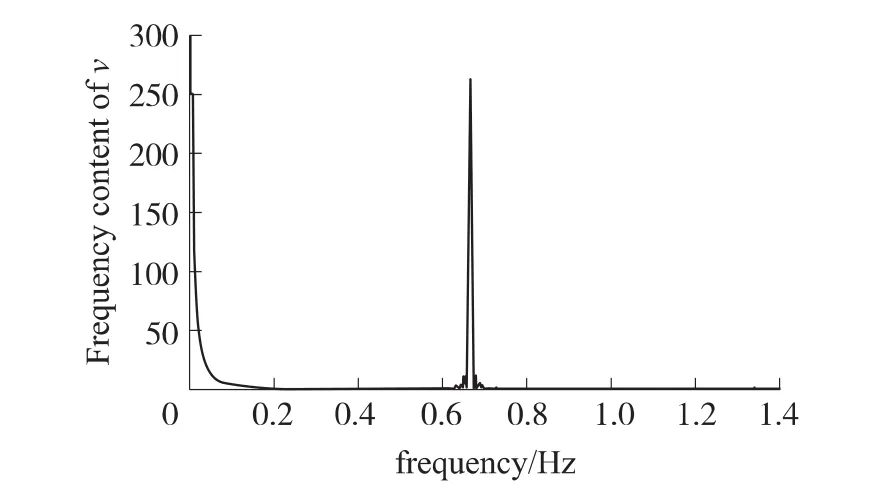
图5 周期1.5 s半固定坐标系速度信息(未滤波)频率响应
由图5看出,信号中存在一个1.5 s的周期信号,还存在一个低频信号,由于数据长度不够还不能通过图上读到具体的低频信号周期。可以推断,该低频信号应该就是舒勒振荡周期信号。如果高通滤波器的引入能够把本低频信号滤掉,就可以得到周期振荡的信息。
经过滤波后得到半固定坐标系下的速度信息v-filter(已通过滤波)图示如图6所示。
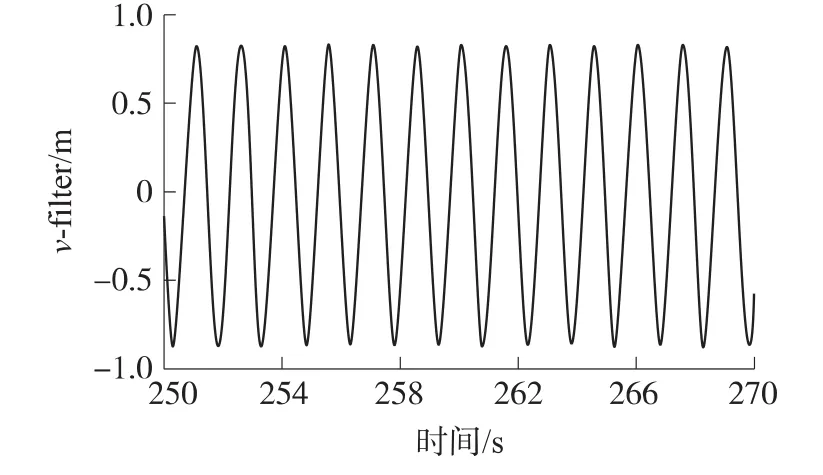
图6 振幅0.2 m周期1.5 s半固定坐标系速度信息(已滤波)
对其进行快速傅立叶变换分析结果如图7所示。
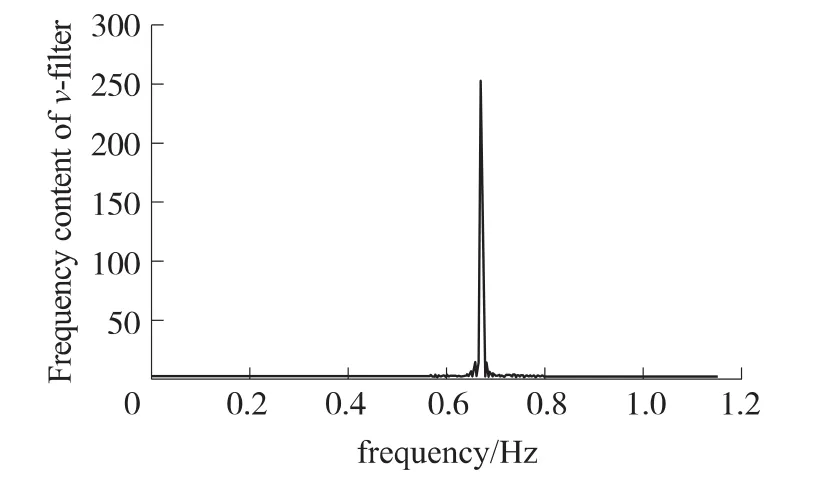
图7 周期1.5 s半固定坐标系速度信息(已滤波)频率响应
由图7可知,经过一个高通滤波器的作用,速度信息已经不存在发散现象,而且只留下了1.5 s的周期振荡信息。对速度信息进行积分得到垂向位移信息图示如图8所示。
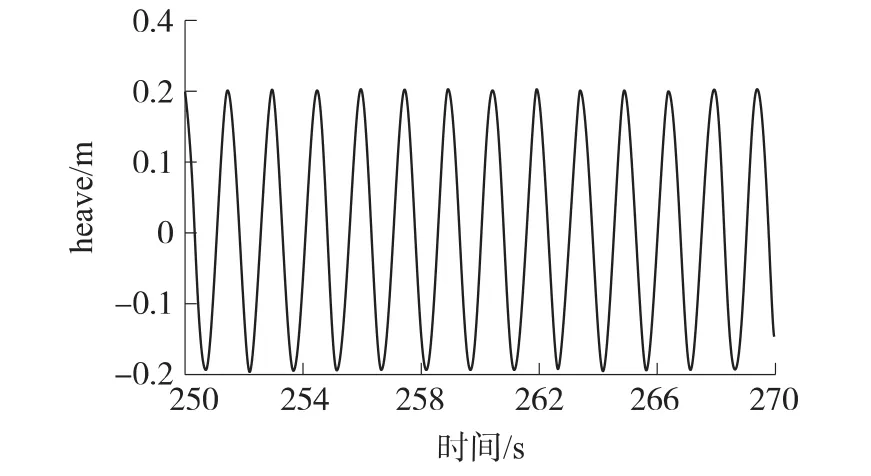
图8 振幅0.2 m周期1.5 s半固定坐标系垂向位移信息
由图8可以清楚地看到,测量信息是幅值为0.2 m,周期为1.5 s的周期信号,和实验的真实情况相吻合。说明达到了预期的测量效果。
4 结论
本文研究了捷联惯导系统的新功能——测量舰艇垂向位移信息。文中给出了舰艇垂向位移的具体定义。给出了利用捷联惯导系统测量舰艇垂向位移的步骤,对其基本原理、关键技术都有详细的阐述。并用试验方法验证了方法的可行性,达到了预期效果。海浪推动舰艇运动具有不确定、无规则性,怎样有效的适应各种海浪变化也会成为日后研究的重点。舰艇垂向位移测量的应用范围很广,半浮式采油船、舰上飞行器的起落、舰艇的物资补给、潜器浅航等等,根据不同的应用领域该项技术也应有所改进并适应不同测量环境的要求。
[1]张桂才.光纤陀螺原理与技术[M].北京:国防工业出版社,2008.1.
[2]黄德明,程禄.惯性导航系统[M].北京:国防工业出版社,1986.79-80.
[3]郑梓祯,刘德耀.船用惯性导航系统海上试验[M].北京:国防工业出版社,2006.18.
[4]柳爱利,戴红德.基于惯性传感器输出匹配的舰船变形估计方法[J].传感技术学报,2011-1.
[5]杨鹏翔,秦永元.基于欧拉角微分模型的接连惯导直接非线性对准方法[J].传感技术学报,2011-3.
[6]李殿璞.舰艇运动与建模[M].北京:国防工业出版社,2008.
[7]Yu Jia-cheng,Chen Jia-bin, ,et al.Multi-Position Observability Analysis of Strapdown Inertial Navigation System[J].Journal of Beijing Institute of Technology,2004,24(2):150-153.
[8]范尚雍.舰艇操纵性.[M].北京:国防工业出版社,2008.
[9]范尚雍,朱军,程智斌.驱逐舰操纵性预报[J].中国造船,1990(1):1-6.
[10]胡国兵.微惯性舰体升沉高度测量算法仿真及数据采集系统的研究[D].南京航空航天大学.硕士学位论文.2005,20-45.
[11]严重中.舰载飞机下沉量计算及影响因素分析[J].飞行力学,1993(4):23-24.
[12]王帆.船用小型姿态测量系统研究与设计[D].哈尔滨工程大学.硕士学位论文.2008,6-14.
[13]Yu M J,Park H W,Jeon C B.Equivalent Nonlinear Error Models of Strapdown Inertial Navigation System[J].AIAA-97-3563,581-587.
猜你喜欢
测控技术(2018年2期)2018-12-09 09:00:56
世纪人物(2018年7期)2018-07-09 18:45:30
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
北京航空航天大学学报(2017年5期)2017-11-23 05:53:18
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
北京航空航天大学学报(2017年12期)2017-04-23 08:31:50
火控雷达技术(2016年1期)2016-02-06 02:18:01
电子世界(2015年22期)2015-12-29 02:49:41
IT时代周刊(2015年9期)2015-11-11 05:51:53
IT时代周刊(2015年8期)2015-11-11 05:50:48
