
基于神经网络的交流伺服控制系统设计
2011-10-18 14:32刘庆存查宏民胡世广
制造技术与机床 2011年6期
刘庆存 丁 昕 查宏民 胡世广
(中国汽车技术研究中心,天津300162)
伺服驱动装置是机电一体化设备的重要组成部分。随着微电子技术的发展,交流伺服技术正朝着交流化、数字化、小型化的方向迅速发展[1]。在伺服控制系统的设计过程中,应充分考虑稳定和响应两项重要指标,而这些因素很大程度上取决于伺服驱动系统的特性。在传统的PID控制伺服系统过程中,稳定性和快速性无法同时满足[2]。针对上述缺点,国内外学者积极探索采用人工智能控制的理论和方法。神经网络具有极强的非线性动态跟踪能力和自适应学习能力,对控制对象的数学模型无依赖性,在智能控制过程中得到广泛应用。针对以上特点,提出了基于神经网络的交流伺服系统控制方法,以改进的BP神经网络为控制器,设计出了交流伺服控制系统。仿真结果表明,应用改进BP网络控制交流伺服系统可同时获得快速性和稳定性。
1 交流伺服系统
1.1 交流伺服系统数学模型
结合交流伺服电动机的电压、电流、磁链以及运动方程,应用鲁棒二自由度控制结构,建立基于电流跟踪的矢量控制直线伺服系统简化模型,控制模型见图1。这里考虑给定输入为阶跃信号的情况,因为内模中要包含给定信号的不稳定极点,所以取M(s)=1/s。


1.2 交流伺服系统结构
交流伺服系统结构如图2所示,输入角度信号θi与电动机光码盘反馈角度信号θ0的差值输入给位置调节器,速度输入信号ωi与光码盘反馈速度信号ω0的差值输入给速度调节器,电流输入信号ii与主电路电流检测反馈电流信号i0的差值输入到电流调节器,3种信号共同驱动主电路工作,控制交流伺服电动机,形成闭环控制系统。

2 BP网络的拓扑结构和数学描述
BP模型是一种采用误差反向传播算法进行有监督训练的多层前向神经网络。网络有输入层结点,输出层结点以及隐含层结点。隐含层结点可以是一层也可以是多层,对于输入信号,要先向前传播到隐含层节点,经过激活函数f(·)后,再把隐含层节点的输出信息传播到输出层节点,最后给出输出结果。节点的激活函数通常选取S型函数,网络结构如图3所示。
网络的学习算法由正向传播和反向传播两部分组成。在正向传播的过程中,输入信息从输入层经过隐含层逐层处理,并传向输出层,每一层神经元的状态只影响下一层神经元的状态,同层神经元之间没有作用。若输出结果与期望的结果不符,则反向传播误差信号,将误差信号从输出层开始,沿原来的连接通路返回,通过修改权值,反复上述过程使得误差信号最小。系统辨识的工作分为两个阶段:一是有监督的训练阶段,调整网络权值,使训练样本的实际输出与期望输出之间的误差达到一定的可接受范围;二是工作阶段,将实际输入赋予网络并得到输出的过程。


BP网是一非线性映射系统,给定输入向量P,通过网络映射得出输出向量A2:
通过 Q 对样本(P1,T1),(P2,T2),……,(PQ,TQ)训练网络,调整各神经元之间的连接强度,即W1、W2、B1和B2这些权值及阈值,达到在一定误差范围内正确映射的目的,使网络对非训练样本输出也能给出近似正确的输出。BP网络完成的是一个多重复合非线性映射,随着权值的改变,可以实现各种复杂的非线性映射[3]。
3 神经网络控制系统
基于神经网络的交流伺服系统控制包括BP网络控制器、运动控制卡、伺服驱动器、伺服电动机和编码器,控制系统如图4所示。其中,BP网络输入是速度的比较差值和位置的比较差值,通过BP网络的自学习和内部运算,输出指令给运动控制卡,运动控制卡输出脉冲控制伺服驱动器,进而控制伺服电动机逼近复杂曲线运动,编码器反馈伺服电动机的位置信号θ,编码器反馈伺服电机的速度信号ω。

运动控制卡是基于PCI总线,利用高性能微处理器(如DSP)及大规模可编程器件实现多台伺服电动机的多轴协调控制的一种高性能的步进/伺服电动机运动控制卡。其包括脉冲输出、脉冲计数、数字输入、数字输出、D/A输出等功能,可以发出连续的、高频率的脉冲串,通过改变发出脉冲的频率来控制电动机的速度,改变发出脉冲的数量来控制电动机的位置。它的脉冲输出模式包括脉冲/方向、脉冲/脉冲方式,脉冲计数可用于编码器的位置反馈,提供机器准确的位置,纠正传动过程中产生的误差。数字输入/输出点可用于限位、原点开关等。库函数包括S型、T型加速,直线插补和圆弧插补,多轴联动函数等,产品广泛应用于工业自动化控制领域中需要精确定位、定长的位置控制系统和基于PC的NC控制系统。具体就是将实现运动控制的底层软件和硬件集成在一起,使其具有伺服电动机控制所需的各种速度、位置控制功能,这些功能能通过计算机方便地调用。
4 系统仿真
判断伺服系统控制效果好坏,一是系统的动态性能;二是稳态精度,包括静态误差、速度误差、加速度误差。伺服系统稳态运行时,希望输出量准确无误地跟踪或尽量复现输入量,即要求系统有一定的稳态跟踪精度,产生的稳态误差越小越好[4]。
BP算法主要缺点是:收敛速度慢,局部极值,难以确定隐层和隐层节点的个数[5]。在实际应用中,需对BP算法进行改进,这里选用基于数值最优化理论的训练算法 Levenberg-Marquardt方法[5]。
伺服系统采用PANASONIC公司生产的Minas A4系列交流伺服系统,电动机型号MHMD082P1U,电动机额定输出800 W,电压规格200 V,额定输出200 Hz,额定转速3 000 r/min,旋转编码器为增量式编码器,2 500 P/r,分辨率为 10 000。
系统仿真分为:BP神经网络的构建、训练两部分。本文采用MATLAB SIMULINK工具搭建伺服控制系统模型,对实验过程进行仿真。
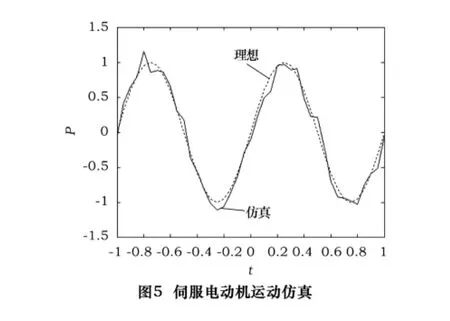
设期望电动机转速为[-1 000,1 000](单位:r/min),且沿正弦曲线变化。为方便系统仿真,将实验中的数据进行归一化处理,r'=r/1 000,其中r'为归一化后的转速,r'∈[-1,1],r为实际转速,r∈[-1 000,1 000]。将期望转速输入至BP网络模型,如图5中理想曲线所示。伺服控制系统仿真模型输出,如图5中的实际仿真曲线所示.图5中纵坐标P表示归一化后的电动机转速(正值为正转,负值为反转);横坐标t表示归一化后的时间。由图5可以看出系统输出很好地逼近期望结果。
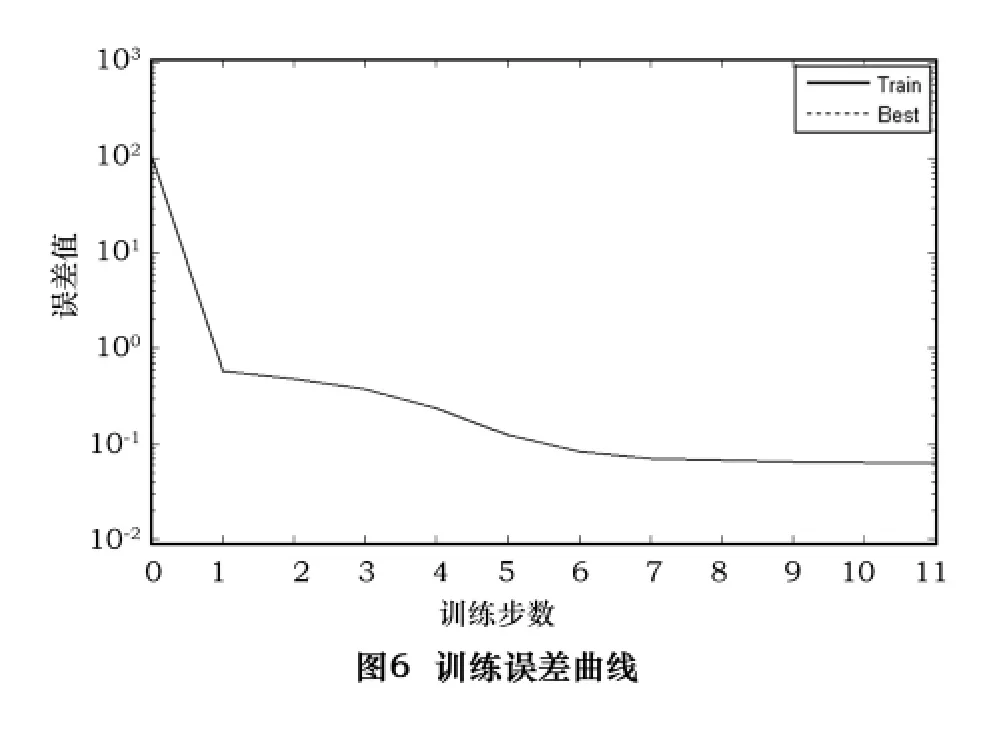
为进一步详细分析逼近期望结果过程中产生的误差,通过Levenberg-Marquardt方法训练网络,得出误差结果如图6所示。其中横坐标为训练步数,纵坐标为误差值。由训练结果可知,总体误差收敛且稳定。在0~5步时误差收敛速度最快,达到第6步时收敛速度趋于稳定,误差稳定收敛在10-2级别。由此可见,该系统收敛速度快且准确,达到了预期要求。
5 结语
本文在交流伺服控制系统中采用神经网络的方法,克服了传统PID控制方法不能同时获得良好的稳定性和快速性的弱点。通过BP网络的自学习能够很快地调整控制器的控制规则,使其适应新环境。仿真表明,基于神经网络的交流伺服系统具有较强快速跟踪性和较好的控制精度等优点。
[1]顾平,李良荣,梁蓓.遗传算法的人工智能在交流伺服中的设计[J].贵州大学学报,2006,23(1):54-58.
[2]张君,黄鹤,张国忠.一种基于预测补偿的人工智能伺服控制系统[J].武汉大学学报,2001,34(5).
[3]杨明辉.基于神经网络系统辨识方法研究[D].北京:北京工业大学,2000.
[4]贡学文.电液伺服系统神经网络自适应控制[D].南京:南京理工大学,2005.
[5]董长虹.Matlab神经网络与应用[M].北京:国防工业出版社,2007.
[6]Th Lubin,E Mendes,C Marchand.Fuzzy controller in AC servo motor drive[C].Electrical Machines and Drives,1995,320-324.
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
北京航空航天大学学报(2022年6期)2022-07-02
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
制造技术与机床(2017年7期)2018-01-19
制造技术与机床(2017年3期)2017-06-23
北京航空航天大学学报(2016年4期)2016-02-27
探测与控制学报(2015年4期)2015-12-15
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
