城市交叉口的智能控制策略
2011-10-10 13:13陈丹丹上海海事大学上海200135
物流科技 2011年4期
陈丹丹, 贾 娟 (上海海事大学,上海 200135)
·交通运输·
城市交叉口的智能控制策略
陈丹丹, 贾 娟 (上海海事大学,上海 200135)
进入20世纪以来,随着汽车工业的发展,汽车成为了人们日常生活中必不可少的交通工具。虽然汽车工业给人们带来了便利,但同时也带来了一系列令人困惑的问题,如交通拥挤、交通事故、环境污染等。城市交通状况的改善不能只是通过改建道路,更重要的是将现有的道路条件进行优化,尤其是交叉口对交通状况更是起着至关重要的作用。
目前大多数控制系统是从国外进口的,采用定时控制或感应控制。首先,它们不太符合中国的国情。定时控制以英国的TRRL法为主,该方法主要针对于机动车交通的信号配时,对于我国的混和交通的特点也有局限性。其次,定时控制适合于交叉口的交通流量变化比较有规律的交通情况。感应控制比定时控制更能适应交通流量的随机变化,但是感应控制的算法中只是考虑对当前通行相位时间的延长,而没有考虑其他相位的车辆排队情况。
解决以上问题的方法有两种:一是采用数学模型对交叉口各个方向的车辆到达做准确的预测,根据运筹学和最优化的理论确定各个方向的绿灯时间;二是采用智能控制的方法对交叉口进行控制。由于城市交通系统具有随机性、模糊性、不确定性等特点,很难对其建立数学模型。所以根据模糊理论的特性,对其采用模糊控制。在模糊理论研究方面,以Zadeh提出的分解定理和扩张原则为基础的模糊数学理论已有大量的成果问世,在模糊逻辑的应用方面,自从1974年英国的Mamdani首次将模糊逻辑用于蒸汽机的控制后,模糊控制在交通运输、机器人、工业控制得到了广泛而卓有成效的应用。
1 模糊控制的工作原理
1.1 交叉口的设置
案例路口如图所示,图中交叉口为东、西、南、北四个方向,路口有机动车流和非机动车流,这些车流分为直行、左转和右转。一般情况下实际中的右转车辆只与马路行人和非机动车流发生冲突,所以对于右转车辆我们只使用定时控制使其与行人和非机动车流交替行驶。

图1 交叉口示意图
对于每个方向直行与左转车道均设有两个线圈感应器构成检测区,这两个感应器相距150m。设在停车线处的称为前端检测器,用于检测该车道的车辆离开数;距离停车线一定距离处的称为后端检测器,用于检测车辆到达数,根据检测算法可以得到某车道上两检测器之间的排队车辆数。
1.2 两级模糊控制器的结构
两级模糊控制器的组成图如图所示。此系统为闭环控制系统。
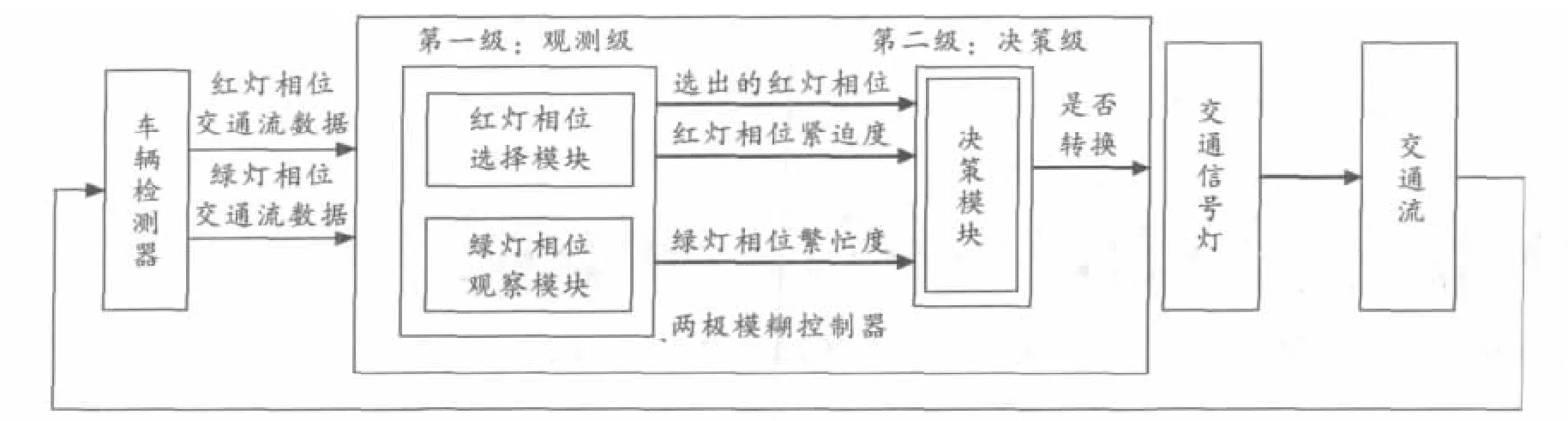
图2 两级模糊控制系统的组成图
通常,将模糊控制器输入变量的个数称为模糊控制器的维数。一维模糊控制器一般用于一阶被控对象,由于这种控制器输入变量只选一个误差,它的动态控制性能不佳,因此被广泛采用的均为二维模糊控制器,这种控制器通常以误差和误差的变化为输入变量,以控制量的变化为输出变量。
本文采用的两级模糊控制器分为观测级和决策级,分别观测红灯和绿灯的交通流数据。为了有效地适应交通条件的变化,控制器不仅要改变周期和绿信比的长度,而且还要改变相位顺序,这样可以提高控制器的控制性能。
两级模糊控制器根据车辆检测器提供的信息选择通行相位。当某一相位被选中后,控制器将赋予其通行权;给予此相位最小绿灯时间,以后控制器每隔2s新采集一次信息,并做出决定是延长绿灯时间还是进行相位切换。这里路口直行相位的最短绿灯时间定为20s,左转定为25s。另外,每一相位车辆连续等待的时间不能过长,这里定为120s,否则驾驶人从心里上不能忍受。
1.3 两级模糊控制器的设计
两级模糊控制器的观测级包括两个模块:红灯相位选择模块和绿灯相位观察模块,决策级只有一个决策模块,每个模块都是一个子模糊控制器。
红灯相位选择模块根据车辆检测器检测到的交通信息,判断除当前绿灯方向外所有红灯相位的交通状况,计算各红灯相位等待绿灯的紧迫度,并确定出对绿灯要求最为紧迫的红灯相位作为下一个绿灯相位的候选相位和它的相位紧迫度,将它们传送给决策模块。绿灯相位观测模块根据车辆检测到的交通信息判断当前绿灯方向交通状况,确定绿灯相位繁忙度,也将其传递给决策模块。决策模块根据第一级两个模块的输出比较红灯相位等待绿灯的紧迫度和绿灯相位的繁忙度,决定是切换相位还是延长当前绿灯时间。如果由红灯相位选择模块选出的相位紧迫度比由绿灯相位观察模块观察的绿灯相位繁忙度高,那么决策模块将进行绿灯相位的切换,否则继续延长当前绿灯时间。
(1)红灯相位选择模块
该模块输入的是除绿灯相位之外的所有红灯相位交通流数据,输出是被选出的相位)和它的相位紧迫度)。Up说明了本相位的综合交通状况。
①输入变量:qr和tr;输出变量:Ur
qr是车道上两个检测器之间的车辆数,tr是某个车流方向自上次绿灯结束后红灯持续的时间。这两个变量反映了当地交通状况。Ur是交通紧迫度,它反映了一个交通流的交通状况。
qr的计算方法如下:qr=qr0+c
式中,qr0——上次绿灯结束时一个车道两检测器之间的车辆数,c——红灯期间一个车道的车辆到达数。
②输入输出变量的模糊语言
③模糊规则
模糊控制规则依据的原则是:当车道上已到达的车辆数增多或红灯持续时间增长时,车流的紧迫度会相应的升高。表1列出的是相关文献根据专家经验和实践总结而建立起来的模糊控制规则表。
④变量论域
qr的基本论域 {0,1,2,3,…,30 };
tr的基本论域 (0,120 );
ur的基本论域 (0,6 );
qr的论域 {0,3,6,9,…,30 };
tr的论域 {0,12,24,36,48,60,72,84,96,108,120 };
ur的论域 {0,1,2,3,4,5,6}。
比例因子均取值为1。

表1 模糊控制规则表
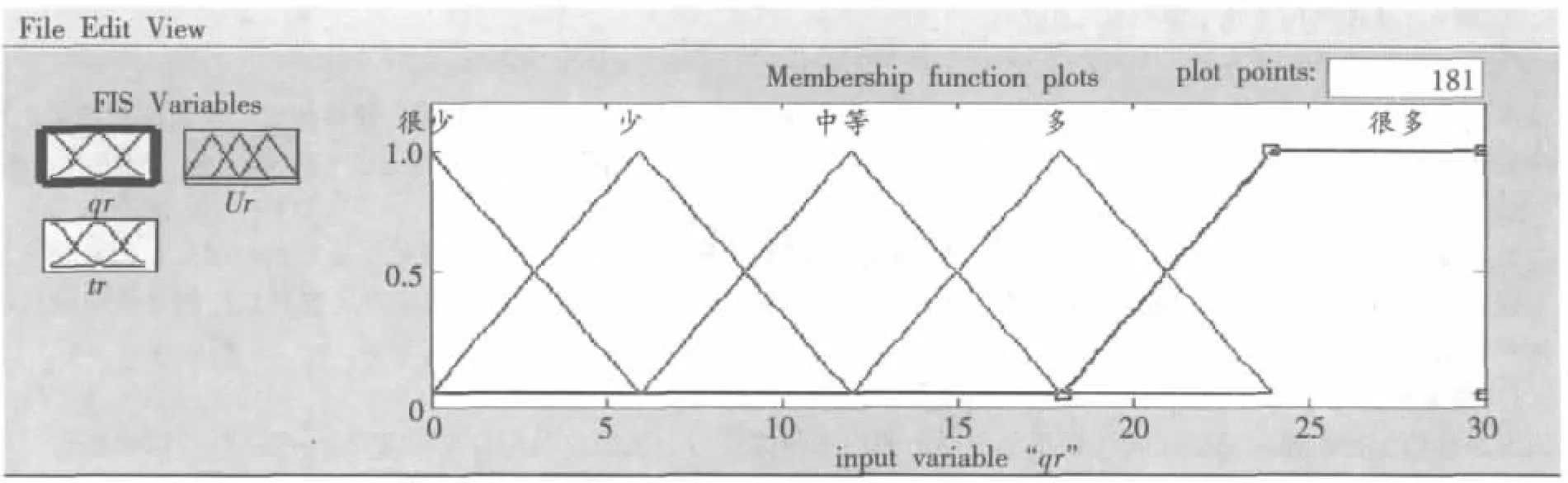
图3 输入变量qr/辆

图4 输入变量tr/s

图5 输出变量Ur
在模糊规则表中共有25条模糊语句, 每条模糊语句都对应一条模糊关系:
式中:i=0,1,2,…,24;M1表示一种矩阵运算关系,目的是把11×11矩阵写成121×1列向量;分别表示这条规则对应的向量,可以在隶属函数图中查到。如:第一条规则:
总的模糊关系是由25条模糊关系并运算而成,是一个121×7矩阵,即:
式中,M2也表示一种矩阵运算关系,目的是把11×11矩阵写成1×121行向量。
⑦去模糊化
一般情况下,采用重心法对输出Ur进行去模糊化。重心法是指取模糊集隶属函数曲线同基础变量轴所围而积得重心对应的基础变量作为清晰值的方法。其公式是:
以上过程输出的是一个交通流的紧迫度Ur,将一个相位的所有交通流紧迫度取平均值,便得到这个相位的相位紧迫度Up。比较所有红灯相位紧迫度,选出其中最大的一个,就得到了此模块的输出相位Pr和它的紧迫度Up。
(2)绿灯相位观察模块
这个模块以绿灯相位交通流数据作为输入,以产生的绿灯相位繁忙度)为输出。绿灯交通流选择绿灯相位各交通里最大剩余车辆数(qg)和绿灯相位经过最小绿灯时间后的绿灯延长时间(tg )。相似地,绿灯相位模块按照红灯相位模块进行模糊运算,得到当前绿灯相位的繁忙度。
(3)决策模块
该模块是以上两个模块的输出:红灯相位选择出的候选相位(Pr)、该相位的相位紧迫度(Up )和绿灯相位观察出的绿灯相位繁忙度(Bt)作为输入,输出的是决策(Dc)。去模糊化后就得到是否转换当前绿灯相位的决策度,如果决策度(Dc)大于规定的阈值1.5,那么就切换相位,否则继续延长当前绿灯时间。
2 MATLAB仿真研究
为检测本文的两级模糊控制器,利用MATLAB对其仿真,并将其与定时系统进行对比。假定采用图1所示的四相位交叉口,八个车道检测区内的车辆到达是随机的,四个相位的各路口饱和量都是1 440(辆),仿真时间是2 400s,每2s进行一次交通流的数据采集和模糊判断。车辆的到达率在0.1~0.7辆/s,车辆的驶出率是1辆/s。假设各车辆到达交叉口是随机的切服从泊松分布。本文利用MATLAB中的随机函数 (random)产生各相位的初始排队车辆数和计数时间到达的车辆数。并将模糊控制和定时控制在不同的交通状况下的效果进行比较,模糊控制的方法明显优于定时控制,车辆的平均延误时间明显减少,更能适应复杂多变的交通控制系统。

图6 Up-Bt-Dc关系图
3 结束语
城市路口交通灯的控制是城市交通管理的一个突出问题。目前绝大多数城市中的交通灯采用的是固定延时的方法,即每一相位都有固定的绿灯延迟时间。众所周知,道路上的车流量具有极大的随机性和模糊性,是一个典型的时变系统。特别在上、下班时间,路口往往堆积着大量车辆,给人们的通行带来了极大的不便。
本文所采用的模糊控制方法是根据交通信息的实时采集计算,按照交通需求自适应地改变周期、相位顺序和绿信比,从而及时疏导交通,有效减少交叉口平均延误时间,提高交叉口的通行能力。
[1] 李国勇.智能控制及其MATLAB实现[M].北京:电子工业出版社,2006.
[2] 袁振洲.道路交通管理与控制[M].北京:人民交通出版社,2007.
[3] 林莉芸,项湜伍.交通灯的一种智能模糊控制系统[J].人工智能及识别技术,2007(3):237-238.
[4] 陈志强,芮延年,陈冶湘.城市路口交通灯多级智能控制方法的研究[J].江苏电器,2007(5):14-15.
[5] 陈洪明.智能交通系统及其建模技术研究[J].四川建材,2008(5):167-169.
[6] Qiao Feng-xiang,Yi Ping,Yang Hai,S.Devarakonda.Fuzzy Logic Based Intersection Delay Estimation[J].Mathematical and Computer Modelling,2002,36:1425-1434.
Intelligent Control Strategy of Urban Intersections
CHEN Dan-dan,JIA Juan (Shanghai Maritime University,Shanghai 200135,China)
采用模糊控制实现对交叉口的智能控制,所用交叉口为四相位的交叉口,依据随机函数产生的交通流量数据对其设计两级模糊控制器,提高实时控制的灵活性。最后运用MATLAB对模糊控制器进行了仿真,仿真结果表明模糊智能控制对红绿灯的实时控制优于以往的定时控制,以达到改善交通拥挤的目的。
交叉口;智能控制;模糊控制器;MATLAB
In this paper,we use fuzzy control to realize intelligent control of intersection.The intersection used in the text is a four-phase one,and then according to the traffic data generated by random function,we design its two-stage fuzzy controller to improve the flexibility of real-time control.Finally MATLAB is used to simulate the fuzzy controller.The simulation results show that the fuzzy intelligent control is better than previous timing control in real-time control of traffic lights to achieve the purpose of improving traffic congestion.
single intersection;intelligent control;fuzzy controller;MATLAB
U491.5+1
A
2011-01-19
陈丹丹(1985-),女,河南睢县人,上海海事大学经济与管理学院硕士研究生,研究方向:交通运输规划与管理;贾 娟(1986-),女,山东芜湖人,上海海事大学经济与管理学院硕士研究生,研究方向:供应链与物流管理。
1002-3100(2011)04-0109-04
猜你喜欢
作文周刊·小学一年级版(2020年40期)2020-10-19
学生天地·小学低年级版(2018年1期)2018-03-14
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24
学苑创造·A版(2016年5期)2016-06-21
西南交通大学学报(2016年3期)2016-06-15
中国工程咨询(2016年1期)2016-02-14
数学年刊A辑(中文版)(2014年1期)2014-10-30
上海理工大学学报(2012年1期)2012-03-20
中国火炬(2010年5期)2010-07-25
数学大世界·小学低年级辅导版(2009年1期)2009-02-17