天基监视空间目标轨迹提取算法
2011-10-09 09:45:10奚晓梁周晓东
电子设计工程 2011年19期
奚晓梁,周晓东,张 健
(海军航空工程学院 控制工程系,山东 烟台 264001)
在可见光波段,通过天基平台监视地球同步带卫星,其关键技术之一是时间序列图像中的弱小运动目标检测。而有效的预处理,是提高检测灵敏度和降低虚警率的前提。
对CCD拍摄的星图进行星点提取和定位,是利用恒星信息进行空间观测的前提条件。那么星图提取和定位的过程中完整星斑对质心精度保证是至关重要的(精确边缘相当于更多可利用的灰度信息)。其结果将直接影响到最终的定轨精度。
目前所见到的星图预处理算法大多只考虑目标的增强、背景的抑制及异常现象去除[1-3],对星斑边缘的保持并没有论述。
文中在对CCD星图图像特点进行分析的基础上,提出了一种在轨空间图像的轨迹提取算法,通过背景拟合及小区域滤波的方法,在抑制背景噪声的同时,很好地保持了星斑的边缘。该算法同美国天基可见光相机SBV在轨检测算法[4](Moving Target Indicator, MTI)相比,在检测灵敏度及虚假目标减少方面有较大提高。
1 空间目标成像时空域模型
文中实验图像数据拍摄于黑龙江省黑河市郊区。4档曝光时间分别为 300 ms、700 ms、1 100 ms、1 600 ms,对应帧数为 352、217、281、302。 图像大小为 1 024×1 024,像素灰度为16位,图1给出4档曝光时间的典型星图(为便于观察,只显示合适灰度段)及其灰度直方图。
遵从电子数与图像灰度成正比的思路,用 r(x,y,t)来表示在位置(x,y)处接受到的电子个数。那么将每个像素对应的电子数表示如公式(1)所示:

其中,c(x,y,t)为电流引入的高斯噪声,d(x,y,t)为暗电流和背景光照引入的泊松分布噪声,s(x,y,t)为静止目标噪声(恒星、银河、星云状星系),n(x,y,t)为待检测目标信号,即移动目标(运动GEO或LEO目标)。从统计得出,大多数像素并不是来自于静止目标噪声,因为静止目标(恒星)还是相对较少。如果不考虑静止目标噪声,那么该噪声为高斯噪声加上泊松分布噪声,这种加性结合的噪声分布对信号分析来说是相对复杂的。为减化分析,高斯和泊松分布被近似认为是纯高斯的,其概率密度函数 p(r(x,y,t))如公式(2)所示,并且泊松分布被近似当做一个常量[4-5]。通过对大量实验图像统计直方图显示,这种简化是合理的。
因此,为满足工程快速计算的需要,首先采用最小二乘拟合估计出图像背景的高斯噪声分布参数,并在3.2节中推导了满足弱小目标分割标准差倍数的求取方法。

从统计结果来看,曝光时间越长,包含的恒星数越多。
典型恒星和弱小目标的能量分布如图2所示。

图1 300 ms、700 ms、1 100 ms、1 600 ms曝光时间星图及对应统计直方图Fig.1 Representative images of four different exposure time and histograms

图2 恒星、GEO弱小目标灰度图和能量柱状图Fig.2 Images of star and weak-small GEO and corresponding histograms
图2(a)和(b)分别表示的是典型恒星及弱小目标的能量柱状图。按照信噪比计算公式(3),计算得信噪比为4.2。

其中T为目标均值,σ为邻域背景均值,为邻域背景标准差,此处邻域取目标质心区域外扩10个像素(不包含目标本身)。
2 基于小区域滤波星图预处理算法
目前大多数的星图预处理算法都集中在天体杂散光抑制、不均匀校正、去除异常现象等方面。这些预处理的方法对星斑的提取都采取了全局或局部阈值的分割算法[6-10]。但对后续的检测前跟踪或跟踪前检测算法而言,虚警率和检测灵敏度是两个重要的指标,那么,对预处理算法而言,不仅仅是简单的背景抑制,理想的情况是减少虚假目标点的同时保持弱小目标的检测灵敏度,两者性能之间要有一个平衡。
文中提出的算法首先利用最小二乘拟合估计背景的均值和方差(适用于高斯噪声,如果不是高斯噪声,其形成原因是天体杂散光引起的,可以利用文献[10-12]中的算法进行校正),然后采用小区域滤波的方式进行背景噪声抑制和目标分割,最后利用简单阈值分割舍去星象边缘像素值过小的点提取完整的星象。
2.1 最小二乘拟合法估计背景的均值和方差
根据公式(2)的统计假设,采用最小二乘拟合的方式进行背景杂波均值和方差[2,7],其步骤流程图如图3所示。
通过以上方法,估计 300 ms、700 ms、1 100 ms、1 600 ms共1 152帧图像背景噪声的均值和标准差的统计分布值如图5所示。
从图4中的统计结果表明,均值与标准差都相对比较稳定,这种稳定属于焦平面恒星凝视状态下的常态。那么在图4(a)有一个明显尖峰,产生的原因是由于观测到了高亮的低轨(LEO)或近地飞行目标,由于观测距离很近,目标像素数200以上,平均灰度达10 000。在图4(d)中产生较大的波动,是由于平台的晃动引起的。高斯拟合的结果如图5所示。
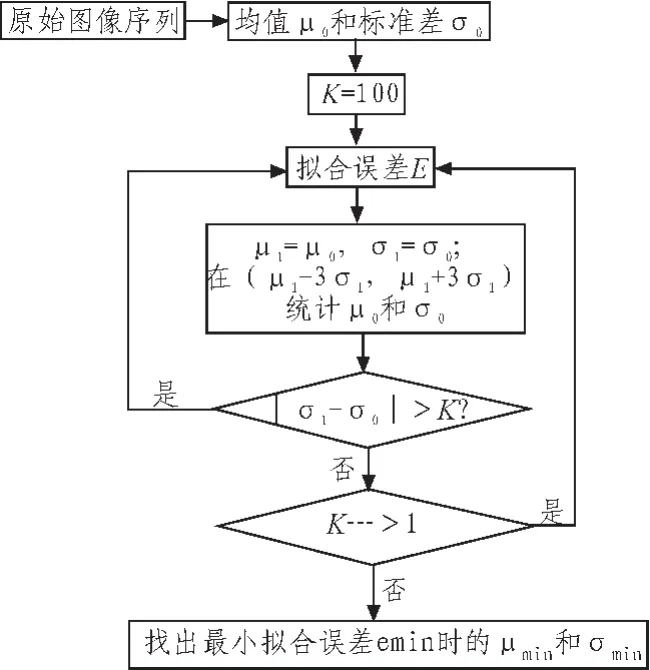
图3 背景杂波参数最小二乘估计流程图Fig.3 Flow chart of LS estimate of background clutter parameters

图4 档曝光时间背景噪声均值和标准差统计曲线Fig.4 Curves of background mean and standard deviation of four different time of exposure
2.2 小区域滤波背景抑制
为减少虚假目标,必须选取较大的阈值;较小的目标能够保持住弱小目标,引入大量的虚假目标。且星斑的边缘保持也是一个重点考虑的方向。
实验证明,考虑采用其他的滤波方式(中值滤波、均值滤波、低通滤波、小波降噪)[3-4,12]来进行处理,第一效果不理想,第二计算量大。

图5 最小二乘拟合结果Fig.5 Result of least-squares matching
小区域滤波算法如图6所示。
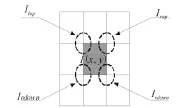
图6 小区域滤波示意图Fig.6 Structure scheme of small domain filter
为了消除噪声的影响,图像中当前像素点值保留的条件必须满足式(4)。

I 和 I(x,y)表示当前像素点值,Ilup、Irup、Ildown和 Irdown分别表示该当前像素点 I(x,y)相邻大小为 2×2 的左上、右上、左下、右下4个邻域均值。背景噪声阈值T计算公式表示为:

μ和σ为最小二乘拟合估计背景的均值和标准差,n为标准差倍数。
公式(4)的含义为:如果四邻域均值其中有一个大于T,那么保留该像素点灰度值,否则将像素值置为背景均值。
对小区域滤波解释为:在无恒星或运动目标的情况下,相当于是一个均值滤波,抑制了背景,减少了虚假目标点。从统计结果看出,在相同阈值情况下,虚假目标点数减少80%(如图7(b)所示);与单点采样阈值化相比目标 SNR有3 dB的提高;当目标(恒星或卫星)在位置x处出现时,采用4个四邻域的判断比单个四邻域准确,对边缘保持敏感度约有2 dB(20%的幅度)的增加[4],而且由于公式(4)、(5)的一致性,易于硬件实现。
关于阈值T的选取,方法比较简单。从统计规律来看,1 100 ms曝光时间检测出的恒星和目标数最多,大约2 000颗左右,平均每个目标20个像素计算,其总和不超过总像素数的 3%,根据概率密度函数公式(2),在(μ-2σ,μ+2σ)之间的概率为95%,那么阈值T选取μ+2σ,即可满足要求。
在相机参数给定的情况下,可以计算出该算法的性能下限,即假设相机能探测亮度高于13等星(信噪比≥4)的星体,那么根据公式(4),直接能够求得阈值T。
图7显示了3种预处理结果背景抑制及虚假目标情况。图 7(b)、(c)说明,在相同阈值情况下,小区域滤波的虚假目标数为0,T=μ+2σ的直接阈值分割,存在大量虚假目标;而从图7(b)、(d)对比中可以看出,即使在分割阈值多一个方差的情况下,还存在4个虚假目标,星象的边缘也不能较好的保持。
图8表示对20帧图像(该序列包含了信噪比接近极限4的弱小目标)最大值投影[13]、预处理之后的轨迹图。
对检测灵敏度而言,与美国天基可见相机在轨运动目标检测中的MTI算法[4]相比,其无法提取图8所示的弱小目标序列作为候选的轨迹。
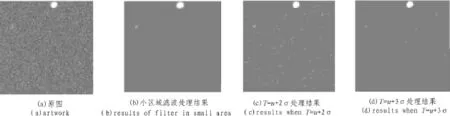
图7 三种预处理方法结果对比Fig.7 Results of 3 different filtering algorithm

图8 连续20帧图像弱小目标预处理结果Fig.8 Filtering results of weak-small GEO in twenty continuous images
3 实验结果与分析
图7和图8已经显示了高斯拟合结合小区域滤波在减少虚假目标以及检测灵敏度方面的优势。对算法的实时性以及在保持边缘获得准确质心结果做一个统计。
算法对1 152帧图像,主频1.8 G、4 G内存机器上,利用VS2005开发图像处理平台实现。表1是算法耗时统计。
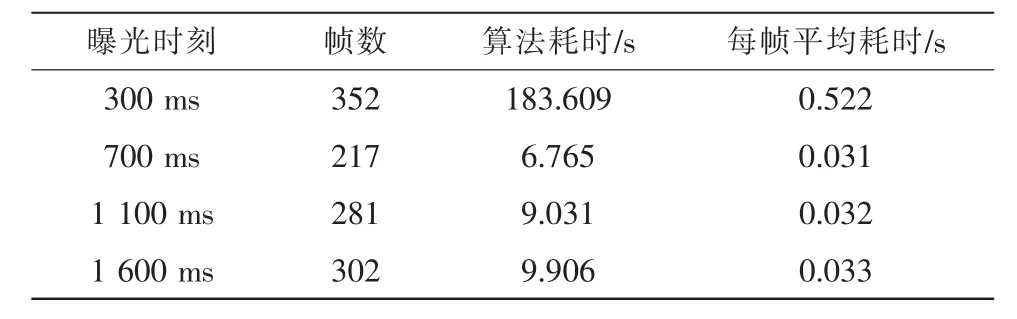
表1 小区域滤波算法耗时Tab.1 Time consuming of small domain filter algorithm
从表1中可以看出,300 ms帧耗时大量增加,其原因在于利用最小二乘拟合时收敛较慢,导致了耗时上的增加。
表2列出了恒星精度的评估结果,表3列出了已知轨道参数卫星(BEIDOU G1)在各档曝光时间内的精度评估结果。图9对赤经赤纬方向上的精度进行了一个统计。恒星和已知轨道卫星的定位结果分别在1角秒和3角秒左右。

表2 部分恒星质位精度评估结果Tab.2 Results of evaluating some stars’centroide precisions

表3 300 ms曝光时间GEO目标定轨精度评估结果Tab.3 Parts results of evaluating GEO’centroide precision of 300 ms exposure-time’images sequences
在图9中可以看出赤经和赤纬方向各档曝光时刻都存在少量的野值,究其原因是由运动目标与恒星的交汇引起,剔除这些野值属于轨迹关联研究的范围,也是进一步研究的内容之一。
表4列出了各档曝光时刻运动赤经及赤纬误差的均值及方差,并与MTI算法结果进行了比对,得出其误差均值及方差都较少1个角秒。

图9 GEO质心精度评估结果曲线Fig.9 The evaluating result curves of GEO’centroide precision
4 结 论
文中提出了一种适用于天基观测在轨检测图像的轨迹提取算法。算法在背景抑制、虚假目标剔除、检测灵敏度及卫星定位精度较MTI算法及常规阈值处理都有较明显的提高,且算法实时性较强,适合工程应用。
算法适用于噪声是高斯分布的情况,但有些特殊的情况将导致噪声非高斯分布,主要是由高强度光照的不均匀性导致。为使算法适用范围更广,可以采用适当的方法先进行不均匀性校正,得到高斯分布噪声。
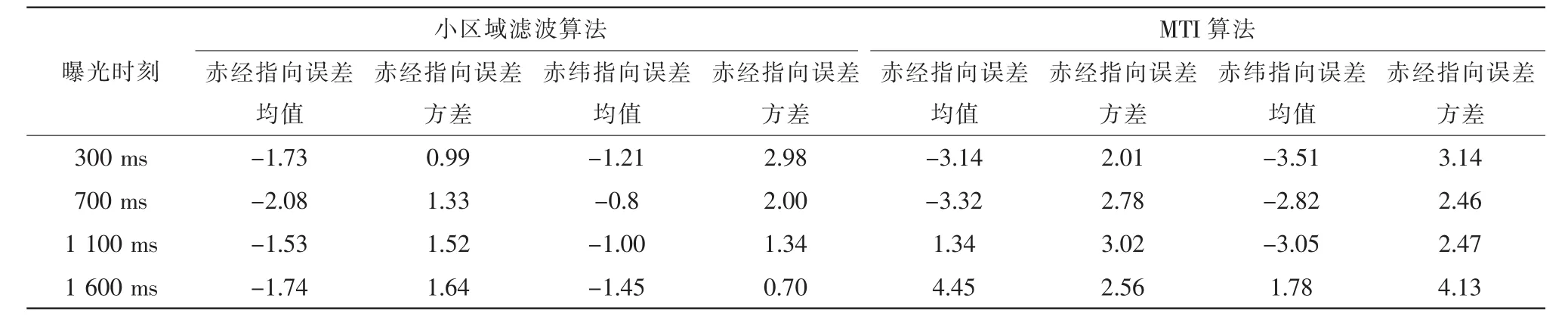
表4 赤经、赤纬精度评估结果统计对比Tab.4 Statistics results of right ascension and declination precision
[1]常兴华,江桥,师鹏宇.星图中亮线的自动检测算法[J].光电技术应用,2009,24(4):41-43.
CHANG Xing-hua, JIANG Qiao, SHI Peng-yu.Automatic detection algorithm of bright line in star-sky image[J].Electronic-Optic Technology Application,2009,24 (4):41-43.
[2]王春歆.空间监视图像多目标检测算法研究[D].山东:海军航空工程学院,2009.
[3]张春华.星空背景图像弱小目标运动检测技术研究[D].山东:海军航空工程学院,2009.
[4]CHU P L.Efficient detection of small moving objects[R],ADA213314.1989.
[5]CHU P L.Optimal projection for multidimensional signal detection[J].IEEE Trans.Acoustics Speech Signal Process,1988,36(5):775-786.
[6]孙济祥.数字图像处理[M].河北:河北教育出版社,1993:156-158.
[7]赵剡,张怡.星图识别质心提取算法研究[J].空间电子技术,2004,1(4):5-8.
ZHAO Yan, ZHANG Yi, the research of star image centroid’s calculation [J].Space Electronic Technology,2004,1(4):5-8.
[8]陈维真,张春华,周晓东.基于局部直方图高斯拟合的星图背景性质研究[J].红外技术, 2008,30(4):230-233.
CHEN Wei-zhen, ZHANG Chun-hua, ZHOU Xiao-dong.Study of star-sky image background characteristics based on local-histogram Gaussian fitting method [J]. Infrared Technology, 2008,30(4):230-233.
[9]杨君,张涛,宋清雁,等.星点质心亚像元定位的高精度误差补偿法[J].光学精密工程,2010,18(4):1002-1009.
YANG Jun, ZHANG Tao, SONG Qing-yan, et al.High accuracy error compensation algorithm for star image sub-pixel subdivision location[J].Optics and Precision Engineering,2010,18(4):1002-1009.
[10]Rafael C.Gonzalez Digital Image Processing Using MATLAB [M].Beijing:Publishing House of Electronics Industry,2008.
[11]RUFINO G,ACCARDO D.Enhancement of the centroiding algorithm for star tracker measure refinement[J].Acta Astronautica, 2003(53):135-147.
[12]WEI X G, ZHANG G J, JIAN G J.Subdivided locating method of star image for star sensor[J].Beijing University of Aeronautics and Astronautics,2003,29(9):812-815.
[13]Henri Maitre Le traitement des images[M].Beijing:Publishing House of Electronics Industry,2006:1-15.
猜你喜欢
数学物理学报(2022年1期)2022-03-16 06:15:00
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:24
现代装饰(2019年7期)2019-07-25 07:42:20
百科探秘·航空航天(2018年12期)2018-12-29 03:57:56
奥秘(2018年10期)2018-10-25 05:38:56
高中生学习·高三版(2016年1期)2016-05-30 05:45:06
中学生数理化(高中版.高二数学)(2016年4期)2016-03-01 03:46:20
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:54:01
数学年刊A辑(中文版)(2014年4期)2014-10-30 01:50:38
世界科学(2013年5期)2013-03-11 18:09:29