地铁隧道通风排烟风机排气量监测系统
2011-10-09 09:46:16张述杰王进丹
电子设计工程 2011年24期
张述杰,王进丹
(沈阳航空航天大学 辽宁 沈阳 110136)
地铁隧道中通风排烟设施的风机及其相关控制器需要定期检查,设施是否保持良好的性能是地铁安防至关重要的问题。隧道狭长、设备高置、人工检修与维护困难,该系统便会很好地解决以上难题。由公式E=V风×S面(V风表示风速,S面表示隧道横截面积,E表示排气量)可知,排气量的测量就是对风速的测量,风速的测量需要解决以下两个问题:1)超声波传感器结构的搭建,合理配置传感器架构才能准确测量风速。2)如何消除测量过程中产生的误差,以提高测量精度是至关重要的[1]。
1 原 理
系统采用发射端一只超声波传感器S,接收端两只超声波传感器R1、R2构成等腰三角形结构,如图1所示。其中R1、R2平行于隧道方向,设风速为V风。
这里假设风速方向为R2→R1,则:
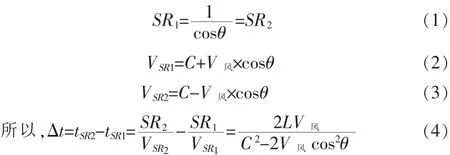
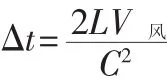
图1 超声波传感器构架图Fig.1 Structure diagram of ultrasonic sensors

由公式(5)可知,只要精确测量出时间差Δt,就可以计算出风速V风,从而得出排气量E。
2 系统硬件电路的设计
系统结构图如图2所示。
系统的核心处理器采用ARM7系列的LPC213x,片上资源比较丰富,适合本系统[2]。发射电路:系统有ARM产生40 kHz的方波信号,一路经过时钟电路处理得到相同频率的正弦信号,经过发射电路的放大驱动超声波发射器发射超声波信号,另一路方波信号经过倍频电路将信号放大到4 MHz用以给A/D、FIFO提供时钟信号。接收电路:由超声波接收器接收超声波信号,经接收电路放大滤波,经A/D、FIFO采集超声波信号,ARM从FIFO读取数据并结合温度补偿计算出排气量,得到的结果由485总线送到上位PC机。
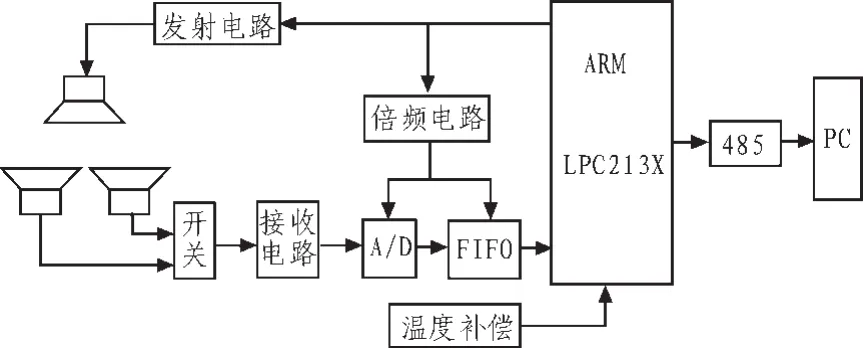
图2 地铁隧道通风排烟风机排气量监测系统结构图Fig.2 Structure diagram of detection system in subway tunnel exhaust fan displacement
2.1 超声波放射端电路
发射端电路如图3所示,ARM产生的40 kHz的方波信号送入L、C网络得到40 kHz的正弦波信号,送入由运算放大器构成的放大驱动电路,提高驱动能力,驱动超声波发生器产生连续的超声波信号。
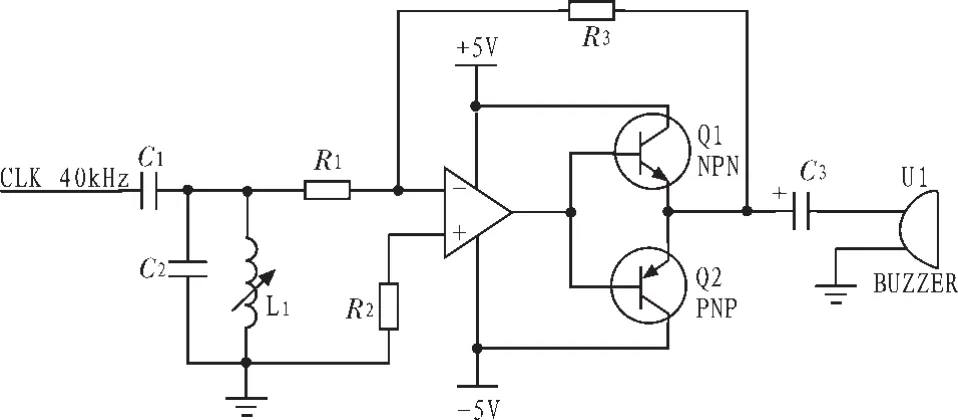
图3 发射端电路图Fig.3 Circuit diagram of transmitting terminal
由于系统采要利用两路信号的相位差得到时间差进而得到排气量,所以统一时钟可以精确地同步信号采集处理,因而A/D、FIFO的采样时钟由ARM同一时钟产生的40 kHz信号经倍频电路提供。倍频电路采用高速锁相环将ARM产生的40 kHz信号倍频到4 MHz。
2.2 超声波接收端信号预处理电路
系统接收端预处理电路如图4所示。
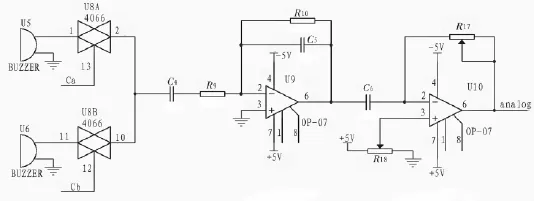
图4 接收端信号预处理电路图Fig.4 Circuit diagram of receiver signal preprocessing
超声波经过空气传播到接收端时,信号一般为mV级别,并与噪声信号叠加到一起[3]。为了给A/D提供合适的输入电压并将初步滤除噪声干扰,这里采用两个运算放大器组成的放大、带通滤波电路,第一个运算放大器设计为LPF,第二个设计为HPF,得到中心频率为40 kHz的带通滤波电路。
2.3 超声波接收端信号采集电路
系统接收端信号采集电路如图5所示。
经过预处理电路的信号送到A/D转换器进行模数转换,本系统A/D转换器采用TLC5510A,是美国TI公司生产的8位高阻抗并行的模数转换器,单电源+5 V供电,最大采样频率20MSPS,输入量程2~4 V,TLC5510A采用半闪速结构及CMOS工艺,大大减少器件中比较器的数量,并在高速转换的同时能够保持较低的功耗,适合本系统的设计。高速采样后的数据直接提供给处理器处理,处理器处理不及时会造成数据丢失,所以先将数据先送入FIFO,处理器从FIFO中读取数据,处理后的数据最后经过串行通信总线送到上位机[4]。
3 系统软件设计
3.1 系统软件设计流程图
系统软件设计包括:超声波发射子程序、接收子程序、误差处理子程序、排气量计算子程序及数据串行通信子程序,程序流程图如图6所示。
系统由发射子程序控制发射电路发射超声波信号,延时一段时间使超声波信号趋于稳定后分两次接收两路超声波信号,将接收到的信号经过误差处理子、排气量计算子程序得到排气量结果,最后通过串行通信送到上位机,其中误差处理需要使用软件算法,可以有效提高测量精度[5]。本系统采用哥拉布斯与改进的相关算法结合的方法,有效剔除异常数据及高斯白噪声的干扰,很好地提高了测量精度。
3.2 信号处理算法
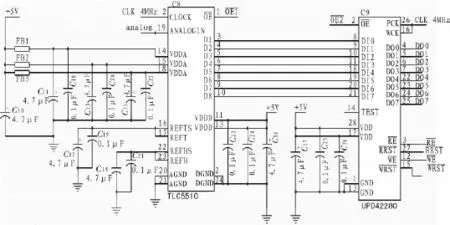
图5 接收端信号采集电路图Fig.5 Circuit diagram of receiver signal acquisition
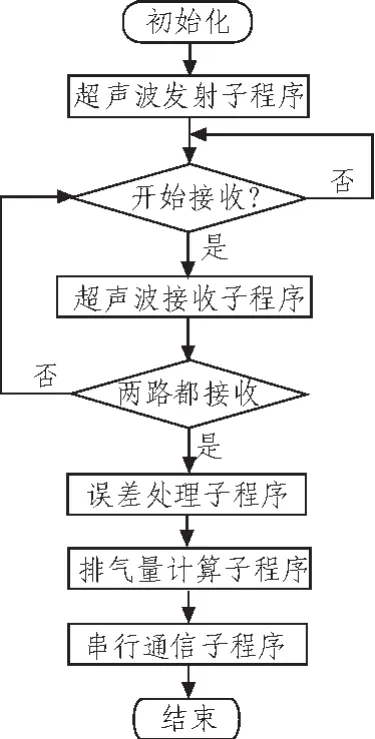
图6 软件设计的流程图Fig.6 Flow chart the software design

由公式(6)可以看出,测量风速的精确度主要由 Δt、C、L 3个因素决定。
C:超声波传播速度C=331.5+0.607T,可以看出C主要与温度T有关,在系统设计中加入温度补偿,可以减少由C产生的误差。
L:主要由传感器的工艺制作有关,只能尽量提高工艺制造水平,另外,在理想无风的条件下,Δt=0,如果测试时不为零,可以在软件中加入补偿,以消除这部分误差。
Δt:这是本系统的核心部分。要准确测量时间差,需要剔除误差,误差主要包括3类:系统误差、随即误差、过失误差,其中过失误差对整个系统的测量精度影响最大,在进行数据处理时,首先应该剔除的也是过失误差[6]。本系统采用改进的格拉布斯准则对采样数据进行处理。
格拉布斯准则[7]:
g(n,α)是为与n、α有关的系数,可以通过查表得到相应的值,α为危险系数,也可以说是出现错误的概率,有3个值:1%,2.5%,5%,具体取值要看实际情况。
接收到的数据经过格拉布斯法则滤除过失误差后,再应用最小二乘法非线性校正法,进一步消除系统误差和随机误差,最终拟合成一个周期的有用信号。
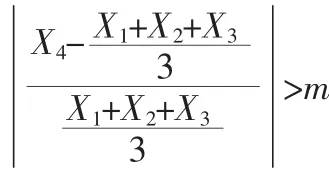
Matlab验证算法仿真结果:
由表1可见,精确度都在1%以下,符合设计要求。
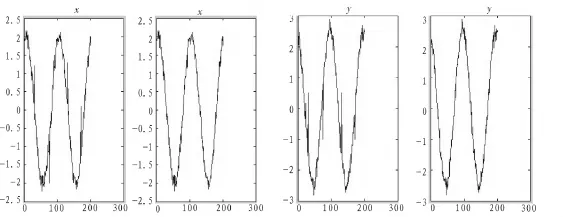
图7 两路信号处理对比图Fig.7 Contrast figure of Two signal processing

表1 仿真结果Tab.1 Simulation result
4 结 论
地铁隧道中的风速一般为20 m/s以下,试验证明,该系统适合地铁隧道中排烟风机排气量的监测,系统结合的软件算法很好地消除了测量过程中的误差,使得测量结果更加精确。
[1]TANG Hui-qiang, HUANG Wei-yi, LI Ping, et al.Ulrasonic wind velocity measurement based on DSP [J].Journal of Southeast University(English Edition),2005(5):20-23.
[2]周立功,张华.深入浅出ARM7-LPC213x/214x[M].北京:北京航空航天大学出版社,2005.
[3]李广峰,刘枋,高勇.超声波流量计的高精度测量技术[J].仪器仪表学报,2001(12):644-647.
LI Guang-feng, LIU Fang, GAO Yong. Accurate measurement technology of the ultrasonic Flowmeter[J].Chinese Journal of Scientific Instrument,2001(12):644-647.
[4]袁丁,余贵珍.基于高速A/D转换器的视频数据采集系统[J].电子设计工程,2011(1):171-174.
YUAN Ding,YU Gui-zhen.Video acquisition system based on high speed A/D converter[J].Electronic Design Engineering,2011(1):171-174.
[5]周杏鹏,仇国富,王寿荣.现代检测技术[M].北京:高等教育出版社,2004.
[6]赵怀林.微机测量与数据误差处理方法 [J].电测与仪表,2002,5:33-36
ZHAO Huai-lin.The research on computer measuring and data errorprocessing[J].ElectricalMeasurementandInstrumentation,2002(5):33-36.
[7]刘瑛,王超,魏功,等.临床室内质控哥拉布斯法的改进[J].河南科技大学学报:自然科学版,2006(2):75-78.
LIU Ying, WANG Chao.WEI Gong, et al.Clinical quality control method to improve grubbs test[J].Journal of Henan Univrsiry of Science and Technology:Natural Science,2006(2):75-78.
猜你喜欢
汽车实用技术(2022年5期)2022-04-02 09:36:22
石家庄铁路职业技术学院学报(2021年1期)2021-06-09 06:06:38
新能源科技(2021年6期)2021-04-02 22:43:34
科学技术创新(2021年7期)2021-03-23 06:37:42
海峡科技与产业(2018年1期)2018-07-09 04:24:52
氮肥与合成气(2015年8期)2015-12-23 10:40:22
中国科技纵横(2015年2期)2015-11-05 02:30:11
有色冶金设计与研究(2015年5期)2015-05-15 03:24:19
科学中国人(2014年16期)2014-11-20 02:50:00
中国新技术新产品(2014年3期)2014-03-24 07:39:08