基于DSP测量的捷联惯导系统设计
2011-10-09 09:46:16马建仓
电子设计工程 2011年24期
郝 鹏,马建仓
(西北工业大学 电子信息学院,陕西 西安 7101295)
捷联惯性系统也就是采用惯性敏感元件(陀螺和加速度计)直接“捆绑”在运载体的机体上,它是一种无框架系统,由3个速率陀螺、3个线加速度计和微型处理器组成,是一种不依赖于任何外部信息、也不向外部辐射能量的自主式导航系统,具有隐蔽性好,可在空中、地面、水下等各种复杂环境下工作的特点[1-3]。而应用MEMS微型传感器结合高速DSP处理器的捷联惯导系统具有体积小、重量轻、集成度高、成本低等优点,具有广泛的应用前景[4-5]。由于惯性元器件有固定漂移率,不可避免会造成导航积累误差,因此,一般商用或者军用自主导航平台系统通常采用如全球定位系统+捷联惯导系统(GPS/INS)[6-7]、星光导航系统+捷联惯导系统(CNS/INS)[8]等组合导航方式进行完整导航,其中捷联惯导系统提供短时高速率高精度导航,而用其他导航方式对其积累误差进行补偿修正。所以对于捷联惯导系统而言,从软件算法和硬件设计上提高其短时间的精度和稳定性,降低陀螺仪、加速度计的噪声干扰、累积误差显得尤其重要。文中采用商用级的MEMS陀螺仪、加速度计、磁阻传感器器件设计低成本的MIMU,采用双DSP进行控制与解算工作,配合无迹卡尔曼滤波和小波自适应阀值降噪等方法,在降低系统成本,提高系统的集成度的同时保证导航系统可以达到商用导航系统对速率及精度的要求。
1 捷联惯导系统硬件设计
所研制的捷联惯导系统主要包括:微惯性测量单元(MIMU)、信号采集和预处理单元、导航解算单元。完整的捷联惯导系统如图1所示。
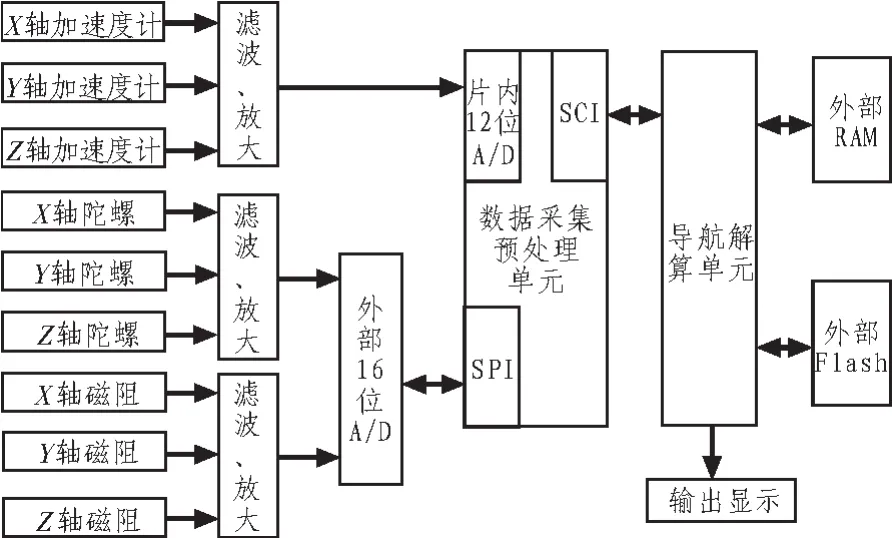
图1 捷联惯导系统硬件框图Fig.1 Hardware diagram of inertial navigation system
前端的微惯性测量单元MIMU是捷联惯导系统最重要部分,后端的信号处理、算法优化等都无法根本改变系统特性,所以该部分传感器数据的精度以及稳定性直接决定了导航系统的精度和性能级别。这里选取的MEMS陀螺仪为ADI公司的ADXRS623,ADXRS623是一款单轴、低成本、功能完整角速率传感器,灵敏度为 12.5 mV/°/s,测量范围为±150°/s(5 V基准电压)。并且可以利用外部电容可以选择1~3 000 Hz范围内的带宽。利用温度输出端可以对传感器进行温度校准;MEMS加速度计选取ADI公司的ADXL335,ADXL335是一款4 mm×4 mm×1.45 mm小尺寸、低功耗、完整的三轴加速度计,能以最小±3 g的满量程范围测量加速度;MEMS磁阻传感器选择霍尼韦尔的HMC1043,HMC1043是一款小型3-轴表面安装的传感器序列系统,适用于低磁场磁性传感,其体积微小、功耗低、磁场(量程)范围宽(+/-6 Oe)。
DSP数据采集单元选取TI公司的TMS320F28335,该芯片具有150 MHz的高速处理能力,具备32位浮点处理单元,适合导航系统高速的浮点型数据处理,12位16通道ADC可以应用于加速度计信号采集。由于对于陀螺、磁阻传感器的采样精度要求高,所以选取TI公司的ADS8345,ADS8345具有最高100 Ksps的采样速率、8采样通道,满足本系统速度以及通道数的要求,DSP通过SPI接口完成外部16位AD的控制和数据采集,并且通过串口将预处理后的传感器信号上传到上端导航解算单元。导航解算单元数据处理芯片同样选取性价比较高的浮点型TMS320F28335,并且外部扩充1 M的RAM和1 M的Flash以满足系统要求。功能上主要完成MEMS陀螺、加速度计预处理数据的接收,以及导航系统姿态、速度、位置信息的解算与显示。
2 捷联惯导系统软件设计
研制的惯导系统软件主要分为信号预处理、导航解算两部分,信号预处理主要包括磁阻罗差补偿,初始对准、传感器数据的零位补偿、温度补偿、降噪处理等。其中本系统根据样机实际运行情况采用基于最小二乘法的7项罗差校正公式完成罗差补偿[9-10],另外采用无色卡尔曼滤波(UKF)算法[11]对静基座下的捷联惯导系统进行初始对准,并且利用小波阀值降噪方法[12]以消减传感器信号中噪声的影响,实验结果表明该方法有明显的降噪效果。导航解算则采用基本的四元数方法。系统软件流程如图2所示。

图2 捷联惯导系统软件框图Fig.2 Software diagram of inertial navigation system
3 系统实验结果
研制成的原理样机的捷联惯导单元信号输出速率为80 Hz,对研制出的原理样机利用转台进行静基座下初始对准,所选用转台的精度误差在6’以内,最小分度单位为0.01°,惯导系统初始姿态给定为(航向角 161°,俯仰角 3.5°,横滚角-4°),对于实测的传感器数据采用UKF算法进行初始对准,初始对准的姿态角误差如图3所示,由图中可以看出,50 s之内俯仰角误差和横滚角误差在6’以内,航向角误差在20’以内,且均趋于稳定。航向角的收敛速度较慢,但稳定后精度较俯仰角和横滚角更高,可以达到系统精度要求。
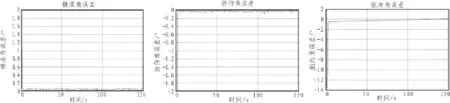
图3 初始对准姿态误差角Fig.3 Initial alignment attitude angle error
在静态试验下经过实验得到的结果:图4为X、Y、Z三轴MEMS陀螺仪原始信号与通过小波自适应阀值降噪后的陀螺去噪信号对比图,由图可以看出经过降噪后,噪声得到很好的抑制,尖峰值、奇异值等基本消除;图5为经姿态解算得到的姿态信息,可以看出航向角、横滚角及俯仰角在60 s左右的时间内偏移小于0.1°,满足导航系统要求。
利用转台对系统进行动态性能测试,这里以航向角动态测试为例,将系统与转台航向角零度对准,转台转动速率设置为5°/s,每转动20°记录一次系统航向角输出,表1为实际转动角度与系统实测输出数据的对比,由表1可以看出,系统转动180°的过程中,其最大航向角误差小于0.25°,实测数据说明系统在动态转动中航向角可以达到很好的导航精度。

图4 三轴MEMS陀螺仪信号预处理Fig.4 MEMS gyroscopes signal preprocessing
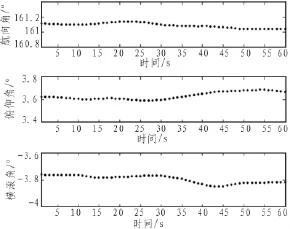
图5 姿态解算信息Fig.5 Attitude solving algorithm information
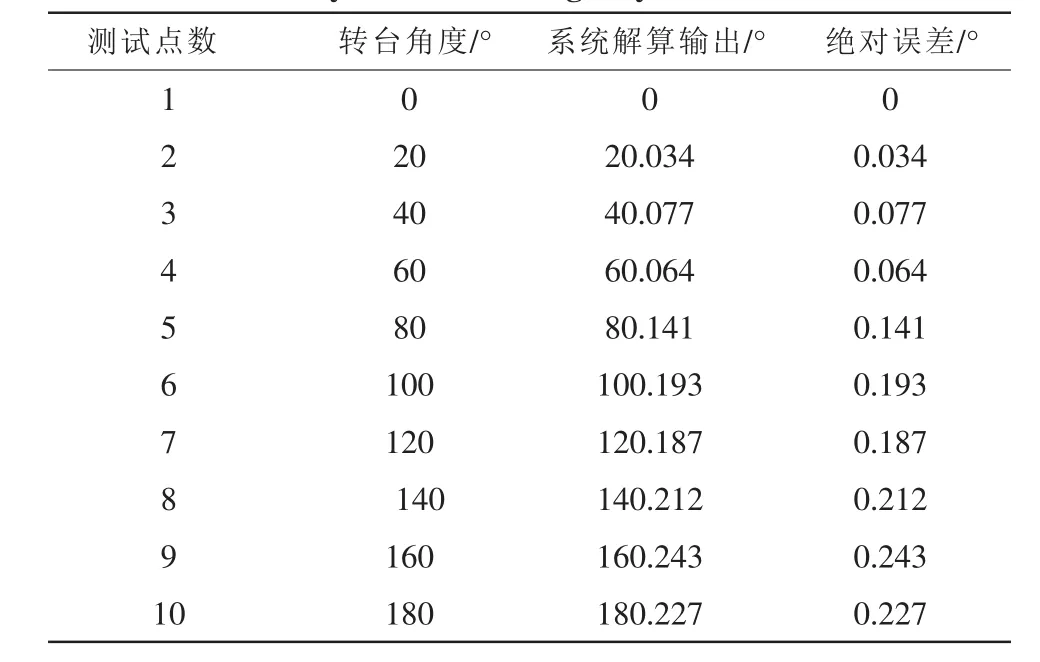
表1 系统航向角动态测试数据Tab.1 System course Angle dynamic test data
4 结 论
由实验结果可以看出,采用商用级的MEMS陀螺、加速度计及磁阻传感器配合DSP处理设计的低成本、集成化的捷联惯导系统,能够将无迹卡尔曼滤波、小波自适应阀值降噪等算法应用到系统初始对准、导航解算当中,在完整实现导航系统功能的同时,提高了系统实际应用的精度和稳定性,因此可以广泛应用于实际导航领域中。后续可以采用性能更好的前端传感器配合高效的导航算法和信号处理方法实现可以达到的战术级或是导航级的导航系统。
[1]刘俊,石云波,李杰.微惯性技术[M].北京:电子工业出版社,2005.
[2]秦永元.惯性导航[M].北京:科学出版社,2006.
[3]方靖,顾启泰,丁天怀.捷联式微惯性导航系统的标定方法[J].弹箭与制导学报,2007,27(5):29-32.
FANG Qing,GU Qi-tai,DING Tian-huai.Calibration method of inertial navigation system[J].Arrow and Guidance Journal,2007,27(5):29-32.
[4]Bernstein J.An overview of MEMS inertial sensing technology[J].Sensors,2003,20(2):14-21.
[5]胡士峰,马建仓,孟凡路.基于MEMS传感器的微惯性导航系统研究[J].计算机测量与控制,2009,17(5):1015-1018.
HU Shi-feng, MA Jian-cang, MENG Fan-lu.Research of micro inertial navigation system based on MEMS sensors[J].Computer Control and Measurement,2009,17(5):1015-1018.
[6]Wang J H.Intelligent MEMS INS/GPS integration for land vehicle navigation[D].Alberta:University of Calgary,2006.
[7]Abdel-hamid W.Accuracy enhancementof integrated MEMS-IMU/GPS system forland vehicularnavigation applications[D].Alberta:University of Calgary,2005.
[8]李艳华,房建成,贾志凯.INS/GPS/CNS组合导航系统仿真研究[J].中国惯性技术学报,2002,10(6):6-17.
LIYan-hua,FANG Jian-cheng,JIA Zhi-kai.Simulation research of INS/GPS/CNS system [J].Journal of Chinese Inertial Technology, 2002,10(6):6-17.
[9]Goldenbery F.Geomagnetic navigation beyond the magnetic compass[C]//Position, Location and Navigation Symposium.[S.L.]:IEEE/ION,2006:684-694.
[10]刘诗斌.无人机磁航向测量的自动罗差补偿研究[J].航空学报,2007,28(2):411-414.
LIU Shi-bin.Study on automatic magnetic deviation compensation of magnetic heading measurement for UAV[J].Aviation Journal,2007,28(2):411-414.
[11]YAN Gong-min,YAN Wei-sheng, XU De-min.The apllication of simplified UKF in SINS initial alignment[J].Journal of Chinese Inertial Technology, 2008,16(3):253-264.
[12]欧阳春娟,欧阳迎春,杨春生.基于小波变换的自适应模糊阀值去噪算法[J].计算机工程与应用,2006,42(5):82-84.
OUYANG Chun-juan,OUYANG Ying-chun,YANG Chunsheng.Adaptive fuzzy threshold denoising algorithm based on wavelet transform[J].Computer Engineering and Application,2006,42(5):82-84.
猜你喜欢
测控技术(2018年2期)2018-12-09 09:00:56
当代陕西(2018年12期)2018-08-04 05:49:20
北京航空航天大学学报(2018年1期)2018-04-20 06:38:19
北京航空航天大学学报(2017年5期)2017-11-23 05:53:18
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
北京航空航天大学学报(2017年12期)2017-04-23 08:31:50
火控雷达技术(2016年1期)2016-02-06 02:18:01
探测与控制学报(2015年4期)2015-12-15 15:01:00
计算机工程(2015年4期)2015-07-05 08:28:57