
GPS近景交会定位技术在海岛礁测绘上的运用
2011-09-27 10:43:42罗亮
地理空间信息 2011年2期
罗亮
(广东省国土资源测绘院,广东广州 510500)
GPS近景交会定位技术在海岛礁测绘上的运用
罗亮
(广东省国土资源测绘院,广东广州 510500)

海岛礁测绘工程是国家测绘局“十一五”期间的5个重要项目之一,GPS近景交会定位模块是卫星快速定位信息采集系统的一部分。该技术可完成对海岛礁特殊地形的测绘任务,对困难海岸线的测绘提出新方法。
海岛礁;近景交会定位;后方交会;前方交会
1 GPS近景交会定位模块
GPS近景交会定位模块是GPS卫星快速定位信息采集系统的一部分,由GPS定位部分、三维数字罗盘、相机、电源等部分组成,它是高精度卫星定位技术、近景大角度交会定位技术以及数字罗盘测角技术的集成与整合,最终实现相片外方位元素的解算以及地物特征点量测。
影像的外方位元素包括摄站点的三维坐标和主光轴的姿态。主光轴的姿态由 2种方式提供:一种是三维数字罗盘直接测定,精度约为5‰;另一种是利用3个影像控制点解算(即单片后方交会)。摄站点坐标采用后处理差分动态定位技术获取,定位精度10 cm,图1是其原理图。

图1 GPS近景交会定位原理图
相片的 3个角元素的初始值的确定在解算过程中很重要,3个角元素可由罗盘测得的数据经转换后确定;但是GPS采集到的数据是以WGS84坐标系为地理约束框架的,目前系统还未建立其与像空间坐标系的旋转关系,罗盘的作用难以发挥。通过将WGS84坐标系转换为站心坐标系,站心坐标系与像空间坐标系之间的 3个角元素的初始值可由罗盘测得的航向、俯仰和横滚转换后得到,关系如图2所示。

图2 辅助空间坐标系与像空间坐标系的空间关系
采用GPS浮标结合地面控制点通过共线方程反解相机外方位元素(即后方交会技术,共线方程如下式所示:

根据后方交会计算出的相机外方位元素,结合同名像点解算地物特征点的地理坐标(即前方交会技术),原理如图3所示。
2 近景摄影测量方法
试验分别在陆地上和海面上进行,选择不同的摄站点,对准某段海岸线进行拍照。在 2个摄站点对同一范围拍摄,通过GPS模块记录摄站点的坐标,罗盘模块测得相机的瞬时姿态参数。
影像的外方位元素包括摄站点的三维坐标和相片3个角元素。
摄站点坐标采用后处理差分动态定位技术,定位精度10 cm;
相片3个角元素由2种方式提供:一种是三维数字罗盘经外标定模块改正并换算得到;另一种是利用3个影像控制点解算。
3 GPS近景交会定位作业试验
3.1 陆地上相片拍摄
在陆地上分别选择摄站点1、2、3,从3个不同的角度拍摄3组相片(命名为相片1、相片2、相片3),相片两两组成像对。
在拍摄的相片中,应合理布设像控点,以使拍照时,像控点在照片上能均匀分布。每张相片的像控点个数为8个以上,像对上同名像点个数为5个以上,以便于解算结果与观测值比对。
利用卫星快速定位信息采集系统下的影像信息采集模块,通过掌上电脑控制相机拍照,读取并保存罗盘数据和GPS数据。
3.2 海上相片拍摄
在海面上离岸约400 m处,在3个摄站点(摄站固定安置在大船上)共拍摄了 3组照片,第一组照片分为6个拍摄区域,第二、三组照片分为6个拍摄区域(分布示意图如图4所示)。
1)在1号采集点,拍摄第一个区域。3个GPS浮标按照图1所示在1号采集点第一个拍摄区域内安放好后,在 1号采集点进行拍摄。两细实线之间代表相机的视场及拍摄范围,2号及3号浮标的位置决定了拍摄范围,3个实心三角形代表GPS浮标,实心正方形代表大船位置。
2)在1号采集点,拍摄第二个区域。大船位置不动,将 1、2、3号浮标移动到第二个拍摄区域,完成第二个区域的拍摄。
3)依次类推,直到1号采集点完成第六个区域拍摄,保证6次拍摄覆盖整个目标区域。
在1号摄站点拍摄完成后,分别移动到2、3号摄站点按上述步骤进行拍摄完毕。
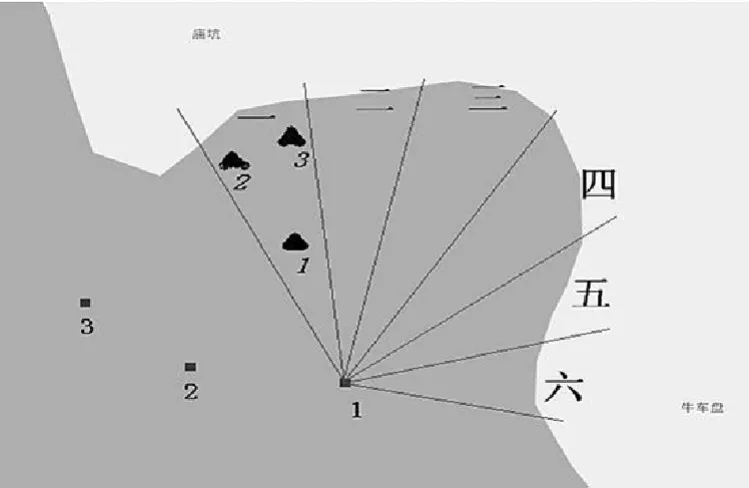
图4 摄站点分布及GPS浮标布设位置图
3.3 检核点测量
根据获取的相片,选择一些明显的地物特征点(如房角等),作为检核点,用于解算值与观测值的比对。
4 近景摄影测量数据处理与分析
4.1 内业数据处理
1)GPS数据精密处理。用GPS接收机测得的静态数据需经过其他软件处理,动态数据需经过ROVER等软件处理(如图5所示)。

图5 ROVER软件处理示意图
2)GPS及罗盘数据的提取。通过查找并判断GPS、罗盘每条信息的时间与相机曝光时间来提取相机曝光时刻的GPS、罗盘数据。
3)天线归心及罗盘数据转换。将与相机固定在一起的天线的坐标归算出相机镜头中心的坐标;将罗盘的3个角度转换为相片的3个外方位角元素。
4)进入“海岛礁卫星快速定位信息采集系统”的“后方交会子模块”,输入已知参数,计算外方位元素,并保存文件(见图6)。
5)进入“前方交会子模块”,打开后方交会计算的结果文件,输入已知参数,解算待定地物点的坐标。
4.2 陆地上试验精度统计
相片两两构成一个像对,后方交会用六参数解算,每张照片选用 3点计算,将前方交会解算结果与实测的检核点进行比对统计(见表1)。

图6 海岛礁卫星快速定位信息采集系统示意图

表1 解算结果与实测的检核点比对/m
4.3 海上试验精度统计分析
以第一拍摄区为例,第 1、2、3摄站上对第一区摄影的相片分别命名为S11、S21和S31(其他拍摄区以此类推),将前方交会解算结果与实测的检核点分别进行比对,精度统计分别见表2、表3、表4。
1)相片S11与S21上解算结果与实测的检核点比对统计(见表2)。

表2 解算结果与实测的检核点比对/m
2)相片S21与S31上解算结果与实测的检核点比对统计(详见表3)。

表3 解算结果与实测的检核点比对/m
3)相片S11与S31上解算结果与实测的检核点比对统计(见表4)。
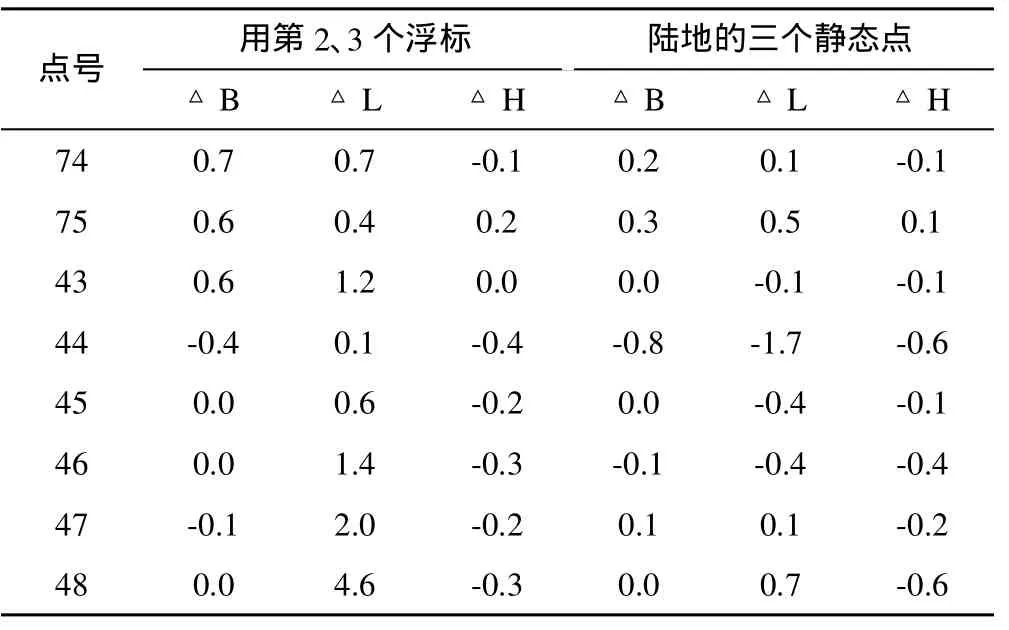
表4 解算结果与实测的检核点比对/m
通过像对 S11-S21、S21-S31的解算结果的分析,离相机镜头近的“第 1浮标”,对解算结果影响很大;离镜头近时,控制点目标在相片上显示较大,其中心位置不易判断,在相片上刺点时,容易偏离控制点的实际位置,导致解算结果精度下降。
通过对像对S11-S31的解算结果的分析,用岛上的静态测量点作为控制点进行近景交会定位点坐标的解算要比用海上的动态测量点作为控制点进点坐标解算的结果要好;说明GPS接收机采样率或动态GPS数据处理得到的瞬时坐标精度对近景交会定位的坐标解算影响很大。
5 结 语
近景交会定位解算未知点绝对精度基本优于1m。用海上的GPS浮标作为控制点,控制点精度与GPS数据的后处理精度相关,近景交会定位解算未知点绝对精度可达到1m。
地物点的三维定位采用像对前方交会实现,定位精度指标通过实地卫星定位比对确定。
拍摄用于前方交会计算的照片时,遵循的几个原则:
1)摄站点距控制点的平均距离大约为两摄站点间基线距离1.5~3倍。
2)拍摄像对时,两位置上相机视准轴的夹角为15°~75°,可通过数字罗盘的航向读数判断。
3)像控点在相片上要分布均匀,尽量避免像控点分布在相片的边缘。
4)海面3个GPS浮标天线高差不小于3m,浮标三角形夹角不小于30°。
用于后方交会的控制点在相片上分布均匀,避免在一条直线上;用于后方交会计算的控制点精度越高越好;拍摄像对时的交会角尽量大一些。当摄站点坐标精度高时,可作为已知值,后方交会时只解算外方位角元素:当摄站点坐标精度低时,可作为初始值,后方交会时解算6个外方位元素。
利用GPS近景交会定位方法,可应用于海岛礁岸线测量。用于岸线测量时,需考虑海面上船只的遮挡情况、光线强度及方向、拍摄距离等因素,使获得的像片上岸线清晰。
[1] 朱肇光,孙护,崔炳光.摄影测量学[M].北京:测绘出版社,1995
[2] 李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2005
[3] 冯文灏.近景摄影测量[M].武汉:武汉大学出版社,2002
[4] 邵卫东,焦明连.GPS动态后处理技术及精度研究[J].中国科技博览,2008,24:247-247
[5] 方书山.GPS动态数据处理软件ROVER1.0用户手册[M/CD].中国测绘科学研究院,2010
Application of GPSClose-range Photogrammetry Crossing Location Technique in Surveying and Mapping on Island and Reef
by LUO Liang
Surveying and mapping engineering on island and reef is one of five important items during 11th five-year planning in State Bureau of Surveying and Mapping.GPS close-range photogrammetry crossing location module is part of the quickly positioning information collection system.This technology can be completed on island and reef of the special terrain mapping mission.Particularly it can provide anew method to map difficulties coastline.
island and reef,close-range photogrammetry crossing location,resection,forward intersection (Page:81)
P228.42
B
1672-4623(2011)02-0081-03
2010-12-27
罗亮,工程师,主要从事工程测量、摄影测量和海洋测绘工作。
猜你喜欢
幼儿教育·教育教学版(2023年2期)2023-06-23 11:18:58
科学(2022年4期)2022-10-25 02:43:50
中国特种设备安全(2021年5期)2021-11-06 05:09:28
青年文学家(2021年1期)2021-03-24 21:12:54
装饰装修天地(2020年7期)2020-06-01 18:43:59
作文·初中版(2017年2期)2017-03-06 21:52:54
工业设计(2016年7期)2016-05-04 04:01:15
新校长(2016年8期)2016-01-10 06:43:49
新闻传播(2015年9期)2015-07-18 11:04:12
发明与创新(2015年25期)2015-02-27 10:39:24
