基于CAN总线的模拟定位机控制
2011-09-27 10:48权周
中国医学装备 2011年2期
王 权周 璞
基于CAN总线的模拟定位机控制
王 权①周 璞②
通过介绍一种基于CAN总线的模拟定位机控制系统的设计方法,详细分析了该控制模式的优点、硬件配置及通信方式的工作机理,证实该系统结构简单、运行可靠,具有一定的推广意义。
模拟定位机;CAN总线;ARM
1 引言
模拟定位机是使用诊断X射线设备模拟放射治疗辐射束的几何条件,定位放射治疗过程中被照射的病灶部位,从而划定治疗辐射野的位置、尺寸等参数的设备[1]。
模拟定位机整机性能在逐步提高,但随着控制技术的发展,传统的控制方式在电气生产工艺、现场的安装、维修等各环节中,出现了一些问题。比如,整机布线复杂、控制不够灵活,可扩展性差等。为解决传统控制方式存在的一些问题,引入了CAN总线控制方式。
CAN总线(Controller Area Network)是一种有效支持分布式实时控制的串行通信网络,它在智能设备、自动化系统间提供了一个全数字化、双向的、多节点的通讯链接[2],其应用范围遍及高速网络到低成本的多线网络。它的应用越来越广泛,不仅应用于最初的汽车工业,而且可应用于过程工业、纺织工业等领域。它是一个全集成的、结构完整、功能完善的过程控制系统。在模拟定位机控制中,其由一中央控制计算机和多个分布于现场的CAN智能控制模块组成,采用CAN现场总线进行联网。由于控制的分散,从而提高了系统工作的可靠性。引入了具有数字化、开放性、分散性以及对现场环境的适应性等特点的CAN总线,方便了现场安装。
2 模拟定位机控制工艺流程[4]
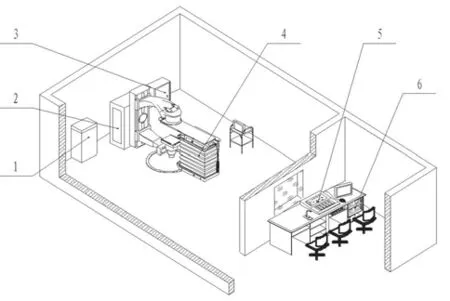
图1 模拟定位机布置图
如图1所示,模拟定位机分控制室和模拟室两部分,其中控制室由工控机、控制台等组成;模拟室由主机(准直器、X线球管、影像增强器)、治疗床、高压发生器、手控器等组成。
针对模拟定位机的控制,要求其可通过计算机、控制台、手控器及床旁控制器对设备进行手动控制。同时要求计算机具有自动设置功能,即通过计算机自动控制机器到一定的位置,譬如机架自动转到90°。18个电机需要实现正转与反转动作、电机的限位保护、相应的动作轴的位置采样。在系统中还要有测距灯、激光灯、野灯的开关控制和安全联锁保护电路。
3 模拟定位机控制方式的对比
90年代的模拟定位机大多采用继电控制系统,其线路庞大、工艺落后,多采用手工布线方式进行控制线的制作。到2000年以后,随着工艺的发展,开始采用计算机集中式控制,在这种方式下,控制系统的核心为一台工业计算机,系统所有的信息都是通过它进行采集、分析、处理的。此系统大大提高了设备档次,可以实现模拟定位机的控制要求,但此系统也有一个弊端,因为模拟定位机的各个子系统都与此计算机有着密切的关系,如果此计算机出现问题,所有的子系统均处于瘫痪状态。
鉴于以上的问题,我们提出了基于CAN总线的分布式控制的设计方法。所谓基于CAN总线的分布式控制是指以多处理器及数据通信技术为基础的计算机控制系统,吸取了仪表控制和计算机直接控制的优点并克服了它们的缺点,实现了集中的管理和逻辑控制的分散。
对于模拟定位机中的每个相对独立的小的子系统,由一个小规模的计算机(ARM单片机)来进行控制,他们各自完成其相应的数据采集与逻辑控制。同时,存在一中央控制计算机,其主要任务是分析各子系统计算机采集的数据,进而根据工艺流程的需要,发送给各子系统计算机控制命令。此中央控制计算机还可以拥有数据库功能,对现场的数据进行记录或提供病人档案管理功能。中央控制计算机与各子系统计算机采用CAN总线模式来完成现场的数据传输。此方式由于控制的分散,从而提高了系统工作的可靠性,简化了现场的布线。
4 CAN总线硬件配置
本系统采用CAN总线网络,是由监控计算机(上位机)、多个CAN控制器(下位机)和CAN总线三部分构成,图2为整机控制系统的拓扑结构:
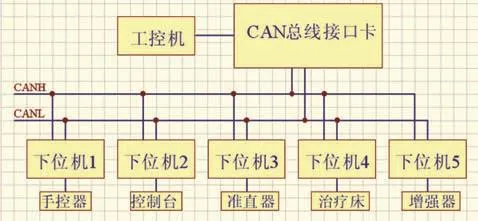
图2 控制系统拓扑结构图
根据模拟定位机的各部分的功能,将其划分为以下子系统:治疗床、准直器、影像增强系统、控制台、手控盒。各子系统分别由带有CAN总线控制功能的ARM单片机来控制,各子系统控制器间或者各子系统和中央控制计算机间可通过CAN网络来相互通讯,完成现场数据的采集和控制命令的发送。
4.1 上位机
本系统采用工控机作上位机,通过CAN接口卡使工控机与CAN总线相连,这样工控机与CAN现场总线就连接成能完成组态、运行、操作等功能的完整的控制网络系统。同时上位机监控软件可实现动态显示、报警、趋势、控制策略、控制网络通信、数字图像采集、处理、冻结存档等功能,并提供一个友好的用户界面。
4.2 下位机(现场控制级)
下位机,我们采用多个ARM单片机组建CAN总线网络[3]。
基于ARM Cortex-M3内核的处理器越来越多,其丰富的管脚资源、内部即可集成CAN2.0B控制器等功能,受到开发人员的亲睐。
每一个ARM下位机终端可单独采集处理现场的数字量(譬如增强器防碰撞信号、准直器防碰撞信号、各电机限位信号、电机运动控制信号)、模拟量(譬如准直器角度、光阑位置信息、井线位置信息)等信号,同时,也可以通过CAN网络发送数据到计算机和接受计算机发送的控制指令,从真正意义上实现了网络化的控制。
在软件编程方面,下位机基于ARM Cortex-M3内核的处理器编程手册中,给出了详细的说明,同时,CAN控制接口卡给出了详细的说明及例程,这样,通过定义上下位机通信控制协议,即可完成系统软件的编制。达到CAN网络方便快捷的控制要求。
4.3 示例说明
以治疗床为例,说明该控制方式的细节。
治疗床的信号分为:
开关量输出:横向电动、纵向电动、升降电动、公转电动、横向手动、纵向手动、公转手动、测距灯控制、野灯控制、室灯控制、激光灯控制。
开关量输入:横向左右限位、纵向前后限位、升降上下限位,公转顺逆限位。
模拟量输入:横向位置、纵向位置、升降位置,公转位置。
模拟量输出:横向速度、纵向速度、升降速度,公转速度。
治疗床可以视为一个独立的智能设备,通过本身配备的床控器即可完成自身的各个运动控制,不再需要向远端中央控制计算机请示去执行什么动作,这样当远端中央控制计算机出现问题时,不会影响到治疗床的任何动作,在使用过程中更安全。由于在安装设备时,治疗床不需等中央控制计算机安装完毕后,即可开展工作,从而加快了安装速度,提高了安装的灵活性。
治疗床控制核心板ARM板可连接到CAN网络上,这样当整机工作时,中央控制计算机通过CAN网络可采集治疗床横向、纵向、升降、公转各个位置的信号,同时,通过CAN网络,中央控制计算机还可以对治疗床进行远端控制。
采用此方式可大大减少现场的电缆数量。CAN网络只需要两根屏蔽的双绞线即可完成通讯任务,其采用差动传输模式,具有较强的抗干扰能力。
同理,我们可以把其它子系统,如准直器、影像增强器系统、控制台、手控器、机架等子系统加入CAN网络中。这样,通过通讯即可完成对各个子系统的控制与数据采集。
5 结束语
基于CAN现场总线的分布式控制系统为一种先进的控制技术,其提高了整机的可靠性,减少了现场的布线,简化了安装步骤,且系统硬件采用模块化结构,易于实现扩展,为模拟定位机的控制提供了一种良好的解决方案,同时,此控制技术可移植到其它放疗设备,这将提高放射治疗自动化和智能化的水平[5]。
[1]乔田奎,祝淑钗,李宝生,等. 放射治疗学[M].北京:人民卫生出版社,2004.5:40-41.
[2]潘新民, 王燕芳. 微型计算机控制技术[M].北京:高等教育出版社,2001.7:186-188.
[3]李宁. 基于MDK的STM32处理器开发应用[M].北京:北京航空航天大学出版社,2008.10:328-329.
[4]潘铭乔,齐晓,黄荣建. 医疗器械标准汇编[M].北京:中国标准出版社,2002.3:193.
[5]顾本广,林郁正,赖启基,等. 医用加速器[M].北京:科学出版社,2003.10:518.
Control mode of radiotherapy simulator based on CAN BUS network
WANG Quan, ZHOU Pu // China Medical Equipment,2011,8(2):13-15.
This article mainly introduces a CAN BUS network control mode used in radiotherapy simulator, analyzes the virtue of this control mode and the hardware components of it. This control mode has easy structure and runs well and it can also be used by other equipments.
Radiotherapy Simulator ; CAN BUS; ARM
1672-8270(2011)02-0013-03
TH 774
A

2010-11-05
王权,男,(1978- ),本科学历,工程师。山东新华医疗器械股份有限公司技术部,从事放射治疗设备的研发工作。
[First-author's address]Department of Radiotherapy Technology, Shandong Xinhua Medical Device Co., Ltd, Zibo 255086, China.
①山东新华医疗器械股份有限公司放疗技术部 山东 淄博 255086
②淄博职业学院电子电气工程学院 山东 淄博 255086
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
铁道通信信号(2020年12期)2020-03-29
哈尔滨轴承(2020年4期)2020-03-17
制造技术与机床(2018年11期)2018-11-23
电子制作(2018年11期)2018-08-04
猪业科学(2018年4期)2018-05-19
空间控制技术与应用(2015年2期)2015-06-05
舰船科学技术(2015年8期)2015-02-27
汽车零部件(2014年9期)2014-09-18
自动化博览(2014年6期)2014-02-28