
海上油膜厚度测量数据采集与处理系统的研究
2011-09-24 03:27葛宝臻刘鹏程孙晶玢吕且妮陈兴梧王项南
海洋技术学报 2011年1期
葛宝臻,刘鹏程,孙晶玢,吕且妮,陈兴梧,王项南
(1.天津大学精密仪器与光电子工程学院,光电信息技术科学教育部重点实验室,天津300072;2.国家海洋技术中心,天津 300112)
海上油膜厚度测量数据采集与处理系统的研究
葛宝臻1,刘鹏程1,孙晶玢1,吕且妮1,陈兴梧1,王项南2
(1.天津大学精密仪器与光电子工程学院,光电信息技术科学教育部重点实验室,天津300072;2.国家海洋技术中心,天津 300112)
为了实现海上油膜厚度实时动态测量,针对所研制的基于差分激光三角法的油膜厚度测量系统,设计了基于DSP的数据采集处理系统。该系统包括相机接口电路、CPLD控制和预处理电路、DSP主处理电路、以及CPLD和DSP之间的缓存电路,并开发了软件驱动和数据处理算法。利用所设计的数据采集处理系统和光学测量装置,对不同厚度的块规和石油油膜进行了实验测量。研究结果表明了该系统的可行性,可用于海面溢油油膜厚度的动态在线测量。
水面油膜;厚度测量;DSP
随着海洋石油开采业与运输业的迅猛发展,海洋石油污染事故频发,对海洋生物和生态环境造成了极大的影响。各个国家都采取积极措施,应对海洋石油污染事故,大力投入资金与人力研究海洋溢油油膜的监控、鉴别等。目前国内外已经提出了多种方法用于不同油品和不同油膜厚度的测量[1-6]。但是,对海洋溢油油膜厚度的精确快速测量技术各国研究的还不多。因此研究一种新的海上溢油油膜厚度测量技术很有必要。
本课题基于863项目“机载投弃式海上溢油油膜厚度测量技术”,其测量基本原理基于激光三角法精密测量技术。测量时,从飞机上投弃浮标到溢油海面,浮标内集成光学传感器和相应数据采集与处理系统,完成厚度数据测量后,通过通讯模块将数据传到飞机上进行分析和处理,得到厚度数据。根据所研制的光学测量装置系统,设计应用于测量浮标内的低功耗、运算能力强大的数据采集和处理系统。
1 电路硬件设计
图1所示为所研制的基于差分激光三角法的水面油膜厚度测量实验装置图。为提高测量精度,并综合考虑光学结构参数,选择了高分辨率的7 450像素LVDS线阵CCD相机。该相机输入输出信号都为LVDS信号,扫描行频为0~5.2 kHz,输出数据为8 bit数字信号。根据该CCD相机以及根据两相机采集到的激光光斑中心位置计算出被测物厚度的数据处理过程,设计了以CPLD为控制和预处理电路,及DSP主处理电路的数据采集和处理系统。系统总体框图如图2所示。相机接口用于采集电路和相机之间的数据转换,CPLD用于两相机的控制以及数据的预处理,DSP用于对双相机数据的主处理,以及CPLD与DSP之间的FIFO缓存电路。最终处理的结果通过无线发射模块发射出去,在飞机上接收端接收数据并对其进行处理,得到油膜厚度数据。

图1 实验室光学测量装置图
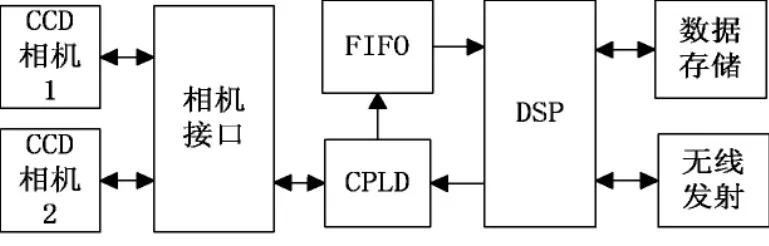
图2 数据采集和处理系统总体框图
1.1 相机接口模块
使用的CCD相机数据格式都为LVDS信号,LVDS即低压差分信号,在信号传输过程当中,利用差分信号能有效抑制共模干扰,采用差分传输,能使系统拥有更高的抗干扰能力[7-8]。该相机输出信号为8 bit数据信号D[7..0],行有效信号LVAL,时钟信号DVAL,输入信号为外同步触发信号TRIG。为了实现数据采集电路与相机的数据交换,设计了LVDS和TTL相互转换的相机接口电路。选择了LVDS接收器DS90LV032A和LVDS收发器DS90LV049。LVDS接收器将相机的数据信号转换为TTL信号。LVDS收发器将相机的时钟信号和行信号转换为TTL信号,同时将采集电路的控制信号转换为LVDS信号以控制双CCD相机。
1.2 CPLD模块
CPLD采用了Altera公司的MAXII系列芯片EPM570。CPLD模块包括:(1)外同步触发产生模块;(2)双CCD相机同步误差消除模块;(3)行提取和DSP控制模块。其中外同步触发电路用于产生双CCD相机的外同步触发信号,使双相机工作在外同步模式下。当双相机工作在外同步模式时,输出的信号还是有ns级别的延时误差,为了方便数据传输和处理,设计双相机的同步误差消除电路,将两相机的8 bit数据同步输出,拼接为一个16 bit数据。相机的扫描行频率在0~5.2 kHz,相机行频率降低,积分时间就会增加,CCD就会更容易饱和溢出。实验时,为保证相机的正常工作,相机工作行频率为1~2 kHz。该测量系统为对海面油膜厚度测量,海水波动带来的油膜表面的变化频率很低,为了减少DSP处理器重复数据处理,设计了行提取电路。在CPLD和DSP之间采用了缓冲FIFO电路,为了使DSP正确的对数据采集和处理,设计DSP的控制行数据模块。
外同步触发电路分别利用分频器和D触发器实现了产生1~2 kHz方波电路并同步输出。同步误差消除电路如图3所示。图3中MCLK为CPLD的基础时钟为80 MHz,D1[7..0]为CCD相机1输出数据,D2[7..0]为CCD相机2输出数据,DVAL1为CCD相机1的时钟信号。图4所示为利用仿真工作得到同步误差消除时序仿真图。由图4可以看出,经过同步误差消除电路,两CCD相机的8 bit数据,就拼接为一个16 bit数据,这样就可以同时传输和处理两CCD相机数据,提高数据传输和处理速度。
相机的行提取和DSP控制模块,采用VerilogHDL描述该模块。该模块的功能为当DSP准备好后,通过GPO口控制CPLD中的行有效信号LVAL通过计数器提取,为FIFO提供写使能信号。行数提取和控制时序仿真图如图5所示。由图5可以看出,该模块可以很好的实现DSP对整行数据采集的控制和行数据的提取功能。
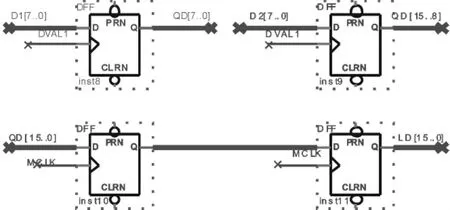
图3 同步误差消除电路
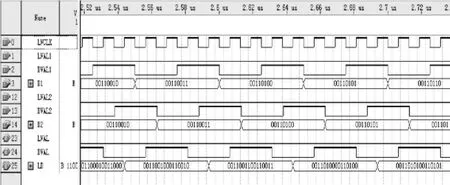
图4 同步误差消除时序仿真图
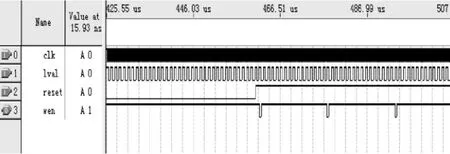
图5 行数提取和控制时序仿真图
1.3 FIFO缓存模块
CPLD预处理电路和DSP主处理电路之间存在时钟差异。为了不影响DSP的处理速度,在CPLD与DSP之间加一FIFO缓存电路。结合双相机拼接后的16 bit数据,以及一帧数据7 450×16 bit,选择了IDT公司的IDT72V367型号 FIFO,容量为36 bit×8 192,最高读写时钟频率为 100 M,输入输出总宽36 bit,可以设置为输入 16 bit,输出为32 bit[9],满足该采集系统的使用需求。在系统中设置FIFO工作在IDT标准模式下,数据进入FIFO,先存储在存储单元中,当达到半满时,通过FIFO的半满标志位中断DSP,DSP开始读取FIFO中的一帧数据到DSP内部RAM再对其进行处理。
1.4 DSP模块
在本系统中,选择了低功耗、运算能力强大,且能与同步FIFO很好无缝连接的DSP芯片TMS320VC5502。该DSP芯片读取外部同步FIFO时的无缝连接图[10]如图6所示。
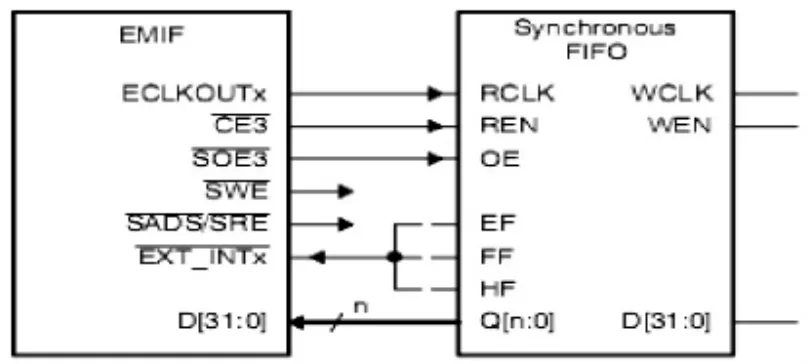
图6 TMS320VC5502读取外部FIFO连接图
为了将最终处理数据无线发射出去,利用TMS320VC5502的多通道缓冲串口2(McBSP)配置为一个通用异步接收/发送器(UART)[11],通过该UART接口连接无线发射模块,发射处理的最终数据。
2 DSP驱动程序与数据处理算法
完成了硬件电路设计制作之后,开发DSP的相关硬件驱动和数据处理算法。数据采集和处理流程图如图7所示。其中DSP的初始化包括:(1)DSP时钟发生器配置;(2)DSP外部中断配置;(3)DSP的DMA配置;(4)DSP的EMIF配置;(5)DSP的UART配置。FIFO的半满信号用于触发DSP的外部中断,因此需要配置DSP的外部中断。DSP的EMIF接口分别连接了外部FIFO和SDRAM,通过FIFO和SDRAM的特性,分别配置EMIF接口[12]。根据无线发射模块的数据位和波特率配置UART。
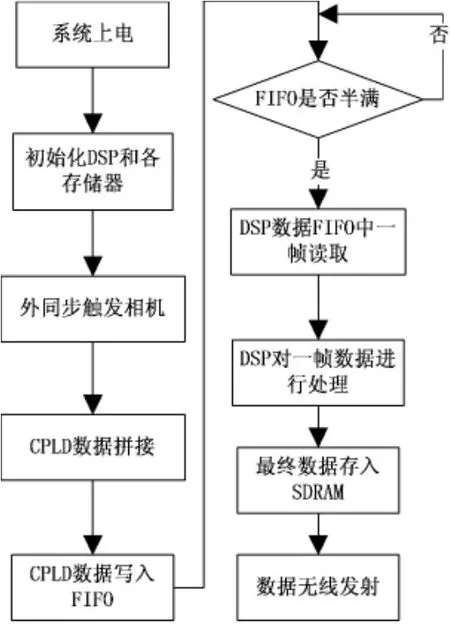
图7 数据采集和处理流程图
基于DSP的数据处理算法包括滤波算法和质心算法。由于采集到的上下表面原始激光光斑很不规则,有很多毛刺(如图8(a)所示)。直接利用质心算法得到的激光光斑中心位置会有1~2个像素的误差。为了消除噪声,减小对质心算法的影响,选择了比较简单易于实现的均值滤波算法。图8(a)和图8(b)所示为均值滤波前后的激光光斑图。
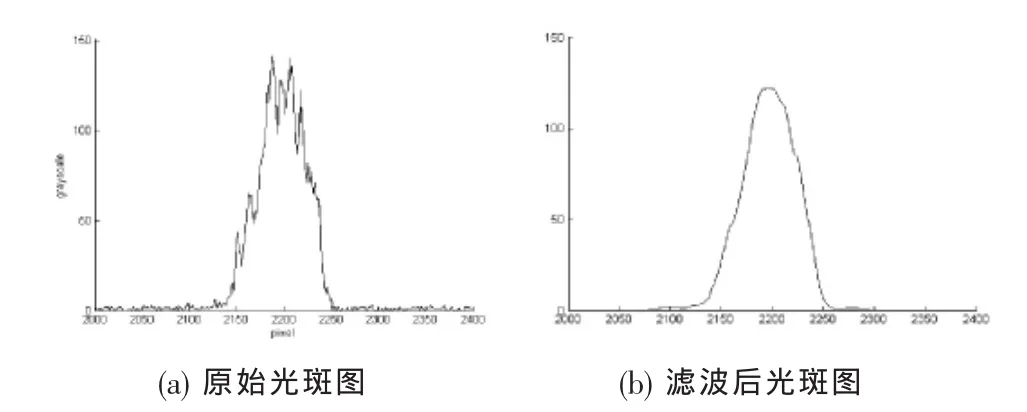
图8 采集的激光光斑图
对滤波的光斑图像,利用质心算法提取其光斑的中心位置,计算公式为[13-14]:

式中:i为像素位置 (1~7 450);n为CCD像素个数7 450;Vi为对应的第 i个像素上的光强(0~255)。
通常激光光斑比较小,覆盖100~200个像素。为了剔除无效数据,减少数据计算量,对激光光斑进行了截取,再对其处理,处理过程如图9所示。
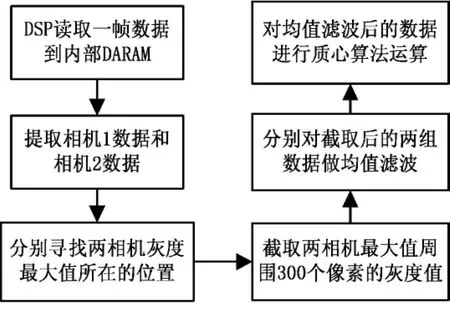
图9 激光光斑中心位置提取过程
3 测量实验
系统硬件、软件开发及调试成功之后,利用该数据采集系统和光学测量装置,对9.8 mm和1.8 mm的块规进行了测量,以验证该数据采集系统的可行性。图10所示为实验现场图。虚线框内为光学测量装置 (图1),采集系统连接两个CCD相机,处理得到的激光光斑中心位置数据,利用光学结构参数对其进行处理得到被测物厚度。在实验中为实时查看采集的激光光斑图像,电路板连接了仿真器。

图10 实验现场图
首先进行系统的标定实验,图11所示为利用10组不同厚度的块规(1~10 mm)标定的10条平行的等值线,并采用拟合的方法得到了校正方程[15],其中从下到上分别代表厚度1~10 mm的块规。利用采集到的光斑中心位置(N1,N2),由式(2)计算得到被测物厚度d。

式中:di和di+1为光斑中心坐标区域邻近的两条等值线所代表的厚度;fi和fi+1为厚度di和di+1的等值线方程。
3.1 块规测量
图12所示为利用该数据采集系统对9.8 mm块规采集到的激光光斑图及滤波处理后的光斑图。图12中的(a)和(b)分别为下上表面的原始图像,图12中的(c)和(d)分别为对应的滤波处理结果。
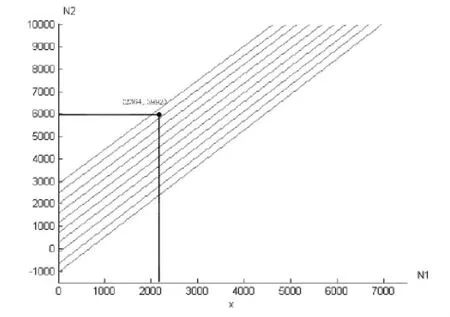
图11 标定1~10 mm块规等值线
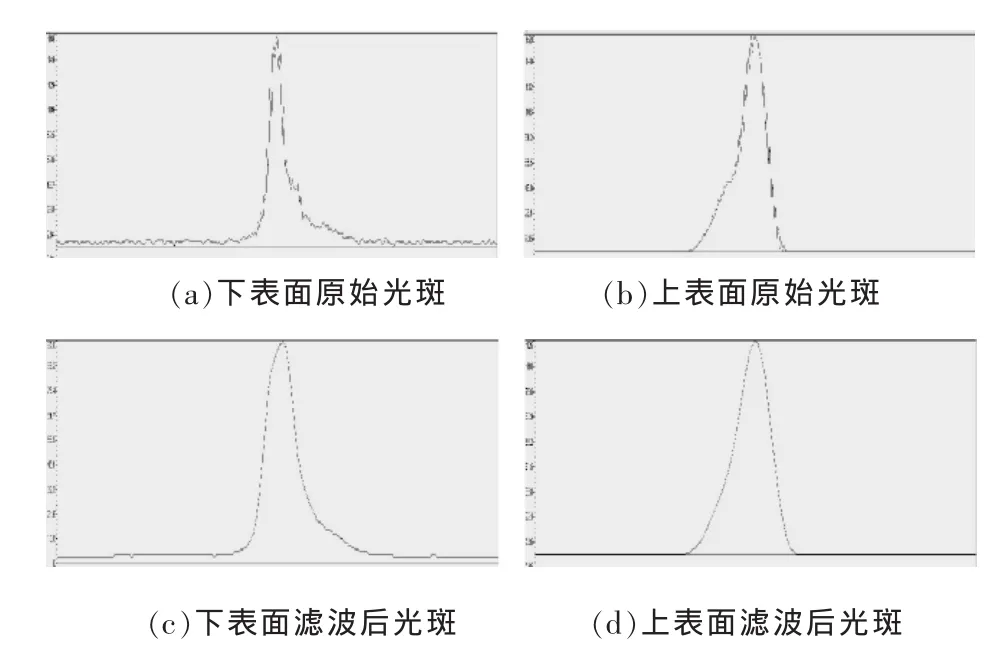
图12 9.8 mm块规的光斑图
实际测量时,油膜所在的位置在测量系统当中的位置不确定,利用平移台上下移动标准块规,分别对9.8 mm和1.8 mm的块规在5个不同高度位置进行了数据采集和处理,其结果如表1和表2所示。

表1 9.8 mm块规测量结果
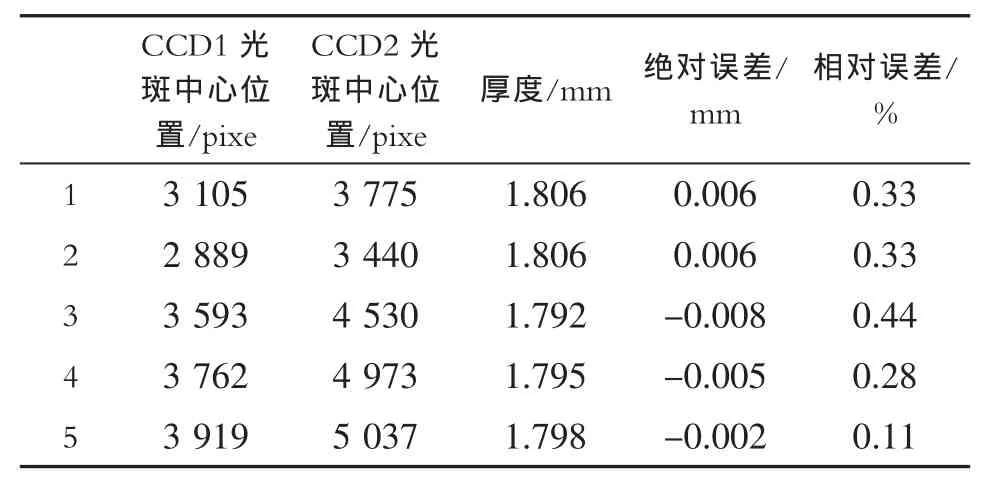
表2 1.8 mm块规测量结果
由表1和表2测量结果可以看出,其最大绝对误差为0.016 mm,最小绝对误差为0.0 mm,平均测量误差为5.2 μm。
3.2 石油油膜测量实验
利用该数据采集系统对不同厚度的油膜进行了实验测量,结果如表3所示。图13给出了对石油油膜1采集到的激光光斑图,及其滤波后的光斑图。同样,图中(a)和(b)分别为下上表面的原始图像,图中(c)、(d)分别为对应的滤波处理结果。
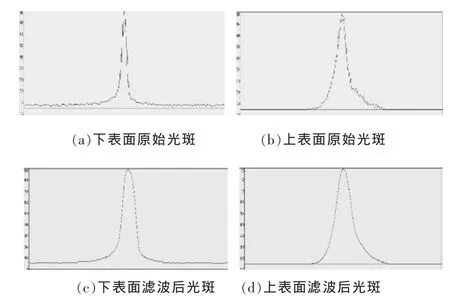
图13 石油油膜1的光斑图

表3 不同厚度的油膜测量结果
4 结论
本文对所研制的基于差分激光三角法的海面溢油油膜厚度测量的光学测量装置,设计了一种基于CPLD+DSP的数据采集和处理方案,制作了电路板,并开发了软件驱动和数据处理算法。结合光学测量装置,对块规和石油油膜进行了测量。从实验结果可以看出,本文所研制的基于DSP的数据采集系统是可行的,可用于油膜厚度测量系统。
[1]Brown C E,Fingas M F,Development of airborne oil thickness measurements[J].Mar Pollut Bull,2003,47(10):485-492.
[2]Pelyushenko S A.Microwave radiometer system for the detection of oil slicks[J].Spill Sci Technol Bull,1995,2(4):249-254.
[3]Abdul-Wahab A S.In Situ Device for Detection of Oil Spill in Seawater[J].Electroanal,2006,18(21):2148-2152.
[4]Sun C H,Yu L C,Sun Y X,et al,Scanning white-light interferometer for measurement of the thickness of a transparent oil film on water[J].Appl Opt,2005,44(26):5202-05
[5]Lu Qieni,Ge Baozhen,Yao Wenda,et al,A method for measuring the thickness of transparent oil film on water surface with laser trigonometry[J].Opt,Laser Eng,2010,49(1):13-15.
[6]葛宝臻,吕且妮,王项南,等,基于差分激光三角法的海面溢油油膜厚度测量方法:中国,200910068627X[P].
[7]陈伟,宋燕星.基于LVDS技术的高速数据图像传输系统[J].电子测量技术,2008,31(11):172-174.
[8]罗乃冬.基于LVDS接收传输接口设计[J].声学与电子工程,2008,89(1):35-36.
[9]IDT Inc.IDT72V3640/50/6070/80/90 3.3V HIGH DENSITY SUPERSYNC II 36-BIT FIFO.2003,9.
[10]Texas InstrumentsInc.TMS320VC5502 Fixed-Ponit Digital Signal Processor Data Manual[Z].2006,8.
[11]Texas Instruments Inc.TMS320VC5501/5502/5509/5510 DSP Multichannel Buffered Serial Port(McBSP)Reference Guide.2004,2.
[12]Texas Instruments Inc.TMS320VC5501/5502 DSP External Memory Interface(EMIF)Reference Guide.2005,8.
[13]闻路红,童卫旗,陈桂林.重心算法确定CCD像点位置的硬件实现[J].仪表技术与传感器,2004,25(5):42-43.
[14]闻路红,童卫旗,陈桂林.用DSP实现重心算法确定CCD像点位置[J].电子技术,2003,30(10):4-6.
[15]孙晶玢.基于差分激光三角法的水面油膜测厚系统光学传感器设计[D].天津:天津大学,2010.
Abstract:To carry out the real-time dynamic measurement of oil film thickness in seawater,a data acquisition and processing system based on DSP is designed on the basis of measurement system of oil film thickness based on differential laser trigonometry developed.The system consists of a camera interface circuit,a CPLD control and preprocessing circuit,a DSP main processing circuit and the buffer between the CPLD and DSP.The software drivers and the data processing algorithms are developed.Combining the data collection and processing system designed and optical measurement device,the experiments are conducted for different thickness of block gauge and petroleum of various thickness.The research results show that the system developed is feasible and applicable to dynamic on-line measurement of oil film thickness of oil spill on sea surface.
Key words:surface oil film;thickness measurement;DSP
Study of Data Acquisition and Processing System of Oil Film Thickness Measurement in Seawater
GE Bao-zhen1,LIU Peng-cheng1,SUN Jing-bin1,LV Qie-ni1,CHEN Xing-wu1,WANG Xiang-nan2
(1.College of Optoelectronics&Precision Instrument Engineering,Key Laboratory of Opto-electronics Information Science and Technology,Ministry of Education,Tianjin University,Tianjin 300072,China;2.National Ocean Technology Center,Tianjin 300112,China)
X55
A
1003-2029(2011)01-0032-05
2010-11-21
国家高技术研究发展(863)计划资助项目(2008AA09Z115);天津市科委基金资助项目(08JCYBJC09900);国家自然科学基金资助项目(40876050)
葛宝臻(1964-),男,教授,博士,主要从事于光电检测、粒子测量等方面的研究。Email:gebz@tju.edu.cn
猜你喜欢
诗歌月刊(2023年1期)2023-03-22
昆明医科大学学报(2021年6期)2021-07-31
锻压装备与制造技术(2021年2期)2021-07-19
石油商技(2021年1期)2021-03-29
科学(2020年5期)2020-11-26
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小哥白尼(趣味科学)(2019年2期)2019-04-17
制造技术与机床(2017年2期)2017-05-04
新疆钢铁(2016年4期)2016-05-25
