基于球杆仪的空间误差测量分析方法研究*
2011-09-12 07:44:52姚雨良张东升
组合机床与自动化加工技术 2011年8期
姚雨良,赵 飞,张东升
(西安交通大学机械工程学院,西安 710049)
基于球杆仪的空间误差测量分析方法研究*
姚雨良,赵 飞,张东升
(西安交通大学机械工程学院,西安 710049)
数控机床误差的检测对于提高机床加工精度具有重要的意义。在分析已有的空间测量方法之后,介绍了一种可用于测量机床空间圆运动轨迹误差的测量仪器——Renishaw QC20-W球杆仪,它可以创建典型的机床位置精度空间测量,获得总体圆度误差值等信息,为实施圆轨迹的误差补偿打下基础。
球杆仪;圆运动;空间测量;数控机床
0 引言
随着科学技术和工业的发展,零件的加工要求更加精密化,因此对数控机床提出了更高的加工精度要求。提高数控机床的加工精度,减小加工误差,主要有两条途径:误差预防和误差补偿[1]。由于单纯使用误差预防方法有一定的局限性,且成本高昂,因此通常采用辅以误差补偿的方式来提高数控机床的加工精度。而误差补偿技术的关键在于对误差的精确识别,对于多轴数控机床、加工中心一类装备来说,由于其空间运动轨迹直接影响了工件的加工精度[2],因而对其进行精度检测和误差溯源就显得尤为重要。
本文通过对Renishaw QC20-W球杆仪的空间测量应用,以某一参考点为中心,利用“部分圆弧测试”方式在三个正交平面上执行球杆仪测试而无需重新调整中心座位置,保证所有测量数据均围绕同一参考点来采集,然后显示“球度”数值结果和最大、最小总体圆度值,以及各个测试圆度结果,从而创建典型的空间位置精度测量。
1 数控机床误差检测方法
根据机床精度检测方法和误差参数辨识过程来分,误差测量方法有三种:直接测量法,间接测量法和综合误差测量参数辨识法。
直接测量法测量精度高,可以直接测量各个误差元,但该方法的测量周期长,测试成本昂贵,且操作过于复杂,对测量人员要求有较高的技术水平;间接测量法是通过测量机床所加工工件的误差值,来获取机床精度信息。该方法对专用机床有一定的实用性,对通用机床显得信息量不足,且由于包含了试件材料、加工工艺过程等不确定因素,使问题变得复杂。
综合误差测量参数辨识法是对机床工作区域内空间特定点的定位误差进行测量,通过数学建模来对测量结果进行辨识,从而分离得到机床各项几何误差值。具体的几种参数辨识方法有:基准棒——单项微位移法;基准圆盘——双向微位移计测头法;球杆仪法;全周电容——圆球法;二连杆机构——角编码器法;四连杆机构法;平面正交光栅测量法[2];R-Test测量装置法[3]和沿体对角线的机床误差激光矢量测量等方法。其中以球杆仪法和平面正交光栅法为代表。
1982年J.B.Bryan首先发明了球杆仪,该方法操作简易、测量速度快,且信息量大,可以完成对机床的“一日测试”,因此受到广泛的重视[4]。国内外学者在球杆仪的研究方面作了大量工作,目前在运用球杆仪进行圆测法试验时,主要有两方面的途径,直接运用已有的球杆仪和运用改进型球杆仪进行圆测法试验。
日本M.Tsutsumi等利用球杆仪进行三轴(2个线性轴和1个旋转轴)、四轴(2个线性轴和2个旋转轴)联动测试,成功实现了五轴数控机床旋转轴8个误差(A轴的1个线性度、2个直线度和3个旋转度误差,A与C轴的垂直度误差和Y方向上的轴线偏差)的辨识和分离[5-6];加拿大 S.H.H.Zargarbashi等提出基于球杆仪的旋转轴五步测试法,实现五个误差(A轴的2个直线度和3个旋转度误差)的测量[7]。
国内对这一方法的研究也很多,台湾国立清华大学W.T.Lei等开发了一种新颖的测量装置——3D Probe-Ball和机床几何误差标定方法,用来识别进给轴误差并进行补偿,实验结果表明机床精度提高了90%[8];华中科技大学刘焕牢等针对现有球杆仪无法测量角度误差的缺陷,研制了一种新的几何误差测量仪器:二维球杆仪[10]。
由于已有的球杆仪只适用于两轴联动的平面圆轨迹测试结果,若想得到空间三维的变化量,则需要通过特别的实验设计方案来实现,由此引入了中间误差,使得结果不理想。针对上述问题,Renishaw公司推出了具有空间测试能力的新一代产品:QC20-W球杆仪。
2 球杆仪测量原理和检测方法
2.1 QC-20W球杆仪结构和原理
QC20-W球杆仪由一个安装在可伸缩纤维杆内的高精度直线位移传感器构成。测量时,中心座固定在工作台上,球杆仪一端小球通过与之有三点接触的工具杯和中心座吸附相联,位移传感器连接杆另一端的小球,通过同样的工具杯和主轴端相连。当杆长发生变化时,内杆移入线圈,感应系数发生变化,检测电路将电感信号转变成位移信号,通过蓝牙(Bluetooth)模块输送至匹配的个人计算机中,使QC20-W可用于“防护门关闭”状态下进行测试。
球杆仪采集到的数据经过Renishaw Ballbar20软件分析之后就可以快速诊断和量化机床定位误差,包括伺服不匹配、爬行误差、反向间隙、重复精度和比例不匹配,以及最大偏差量、球度和总体圆度等空间精度误差值。Yoshiaki Kakino及其合作者对运用球杆仪进行圆测法所测得的径向误差和机床空间点P(X,Y,Z)之间的关系式[11]:

其中,EX、EY、EZ是空间点 P(X,Y,Z)在三个轴上的误差分量。该关系式奠定了进一步理论研究的基础,已为多数学者所采用。
QC20-W球杆仪具体系统参数如表1所示[12]。
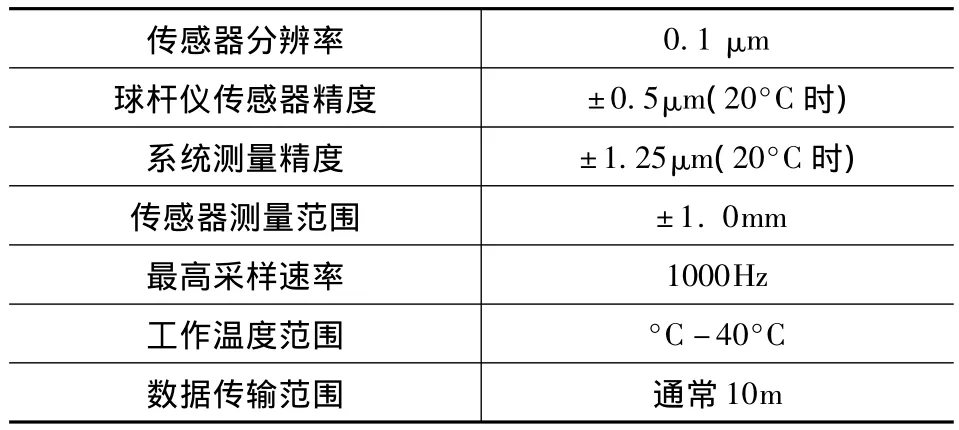
表1 QC20-W球杆仪具体系统参数
2.2 实验方案设计
基于球杆仪的两轴联动的平面圆轨迹测试已有很多文献研究,因此不再赘述。在此主要介绍机床位置精度的空间测量分析。
本实验基于康铖KMC550三轴数控机床,该机床的主要系统指标如表2所示。

表2 康铖KMC550数控机床系统指标
实验过程如图1所示,选择XY平面上某一参考点为中心,固定好底座之后,利用“圆弧测试”和“部分圆弧测试”在XY、ZX、YZ三个正交平面上依次执行球杆仪测试而无需重新调整中心座位置,保证所有数据均围绕同一个参考点进行采集(注:QC10球杆仪不能进行此项测试)。球杆仪的测量轨迹如图2所示。

图1 QC20-W球杆仪空间测试过程

图2 球杆仪的测量轨迹
具体步骤如下所示:
(1)在XY平面进行360度(越程45度)测量;
(2)在ZX平面进行220度(越程2度)测量;
(3)在YZ平面进行220度(越程2度)测量;
(4)每个平面以不同速率和不同的量程分别进行两组测量并保存数据。
3 实验过程
3.1 球杆仪的安装
实验方案设计好之后,应用QC20-W球杆仪分别对三轴数控机床的三个正交平面进行测试,球杆仪的具体安装步骤为:
(1)将球杆仪主轴工具杯安装到主轴上,紧固;
(2)移动主轴到测试轨迹圆圆心位置;
(3)将设置球放置在球杆仪的中心座杯上,将中心座的紧固拉杆处在松开位置;
(4)将球杆仪中心座安装到工作台上,位置在圆心处,即主轴正下方;
(5)慢慢下降主轴位置,并不断调整球杆仪中心座位置,使设置球和中心座杯受磁力自由吸附到主轴工具杯上,使设置球球心和主轴轴心在同一直线上;
(6)旋紧球杆仪中心座上的紧固拉杆,记录机床坐标位置并将其设置为坐标原点;
(7)(9)操作机床,使主轴位置上升2~5cm,并将设置球取下放置在仪器箱中;
(8)(10)操作机床,平移主轴至测试起点上方,然后下降至测试起点坐标位置处;
(11)旋开球杆仪开关,并将测试连杆架设至图示位置。

图3 球杆仪安装示意图
该实验设计是在室温20°C和机床空载初始状态下进行,忽略机床的热变形误差和主轴刀具端的热漂移误差。注意在安装过程中必须避免发生撞击,否则将严重损坏球杆仪的测试精度。
3.2 实验结果
测试完成之后,分析实验测得的数据和图像。
表格3和图4分别为Renishaw Ballbar20软件分析得出的数据和图像。其中偏差是指球杆仪所测的实际运动轨迹与名义轨迹半径之差;圆度指球杆仪在测量中所测得的最大半径和最小半径之差;球度是指球杆仪所测得的最大偏差量和最小偏差量之差。
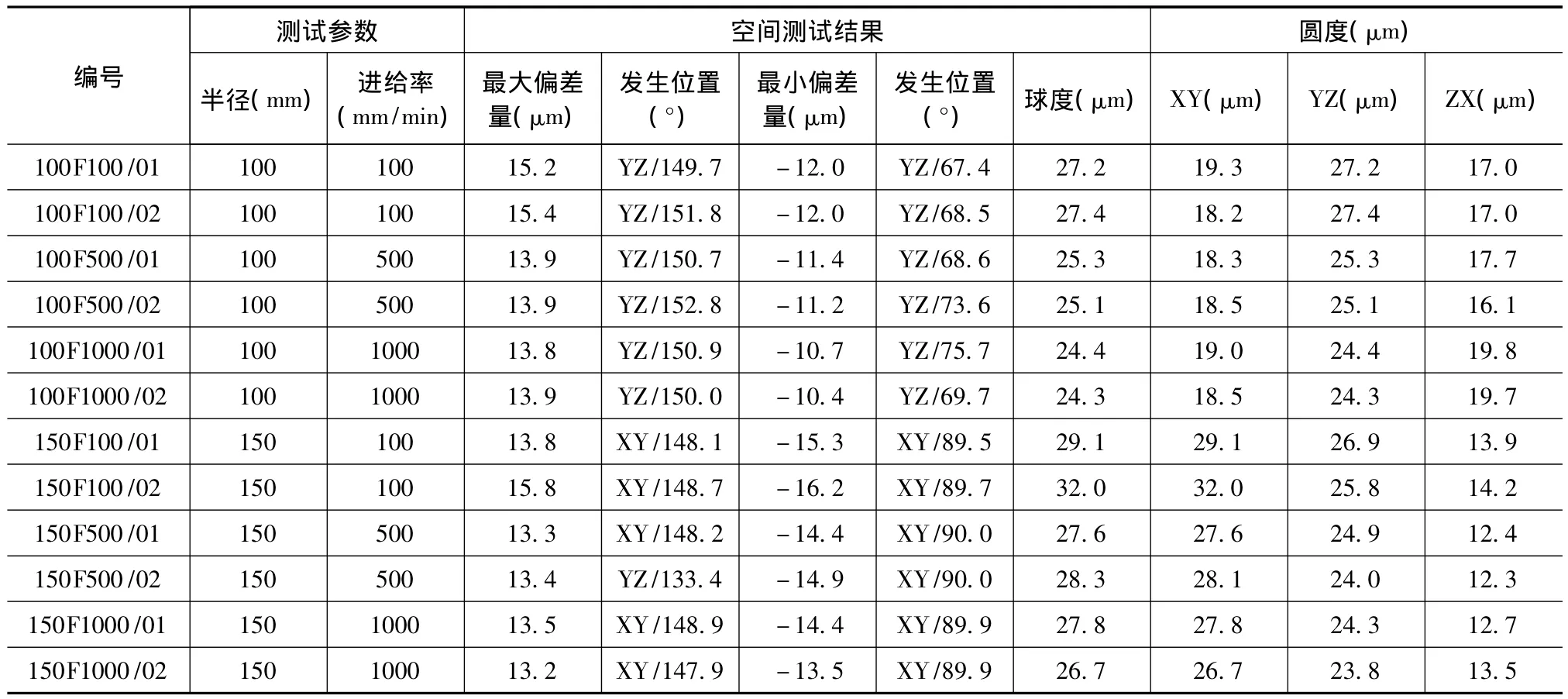
表3 实验测试康铖KMC550三轴数控机床的空间位置精度

图4 球杆仪测试结果截图
通过对康铖KMC550机床进行空间测量实验,证明了基于QC-20W球杆仪的空间测量方法简便有效,能够检测出数控机床作圆弧插补运动时的球度误差,最大和最小偏差量的大小和方位。
4 结束语
数控机床的几何误差直接影响机床定位精度和工件表面加工质量。文中应用QC20-W球杆仪快速创建典型的位置精度空间测量,获得总体圆度误差值等信息,为实施圆轨迹的误差补偿打下基础,且具有检测简单高效,设备价格较低廉的特点,为快速检测提供了有力的工具,大大提高了机床的实用化程度。
[1]倪军.数控机床误差补偿研究的回顾及展望[J].中国机械工程,1997(8):29-32.
[2]洪迈生,苏恒,等.数控机床的运动精度诊断——评述与对策[J]. 机械工程学报,2002,38(2):90-94.
[3]S.Weikert and W.Knapp.R-Test,a New Device for Accuracy Measurements on Five Axis Machine Tools[J],Annals of the CIRP,2004,53(1):429-432.
[4]J.B.Bryan.A simple method for testing measuring machine and machine tools[J],Precision Engineering,1982,4(2):61-69.
[5]Masaomi Tsutsumi,Akinori Saito.Identification of angular and positional deviations inherent to 5-axis machining centers with a tilting-rotary table by simultaneous four-axis control movements[J].International Journal of Machine Tools and Manufacture,2004(44):1333-1342.
[6]M.Tsutsumi,A.Saito.Identification and compensation of systematic deviations particular to 5-axis machining centers[J].International Journal of Machine Tools and Manufacture,2003(43):771-780.
[7]S.H.H.Zargarbashi,J.R.R.Mayer.Assessment of machine tool trunnion axis motion error,using magnetic double ball bar[J].International Journal of Machine Tools and Manufacture,2006(46):1823-1834.
[8]W.T.Lei,Y.Y.Hsu.Error measurement of five-axis CNC machines with 3D probe-ball[J].Journal of Materials Processing Technology,2003(139):127-133.
[9]马锡琪.数控机床运动误差测试装置——双球规测量仪[J]. 计量与测试技术,1996,23(4):3-5.
[10]刘焕牢.数控机床几何误差测量及误差补偿技术的研究[D].武汉:华中科技大学,2005.
[11]Yoshiaki kakino,Yukitoshi Ihara and Yoshio Nakatsu.The measurement of motion error of NC machine tools and diagnosis of their originals by using telescoping magnetic ballbar method[J].Annals of the CIRP,1987,36(1):377-80.
[12]2009 RENISHAW PLC.Renishaw.Ballbar Help.Ballbar 20HPS software.Version 5.0.
Space Error Measurement&Analysis of CNC Machine Tools with Ballbar
YAO Yu-liang,ZHAO Fei,ZHANG Dong-sheng
(Xi’an Jiaotong University,School of Mechanical Engineering,Xi’an 710049,China)
The detection of the error of NC machine tools have great meaningful to improve the machining accuracy.After analysis of the existing space measuring methods,the Renishaw QC20-W ballbar,a measuring instrument for measuring spatial circle movement error of machine tools is introduced.It can measure a typical machine tool’s position accuracy,acquire the overall value ofroundness error and lay foundation for the implementation of the compensation of the circular trajectory error.
ballbar;circular motion;geometric measurement;CNC machine tools
TG156
A
1001-2265(2011)08-0072-04
2010-12-07
国家科技重大专项项目(2009ZX04014-023)
姚雨良(1986—),男,山西人,西安交通大学硕士生,研究方向为机床几何误差辨识,(E-mail)yao.yu.liang@stu.xjtu.edu.cn。
(编辑 赵蓉)
猜你喜欢
制造技术与机床(2019年12期)2020-01-06 03:17:26
太原科技大学学报(2019年3期)2019-08-05 01:18:16
制造技术与机床(2018年12期)2018-12-23 02:41:20
电子制作(2018年10期)2018-08-04 03:24:46
制造技术与机床(2017年9期)2017-11-27 02:13:56
制造技术与机床(2017年3期)2017-06-23 08:11:33
中国防伪报道(2017年4期)2017-06-15 16:31:27
电子制作(2017年20期)2017-04-26 06:57:41
浙江大学学报(工学版)(2015年11期)2015-07-11 10:10:04
电子工业专用设备(2015年4期)2015-05-26 09:10:40