
基于曲柄摇杆机构和凸轮机构的四足机器人步态分析
2011-08-24 07:24王健,贺鑫,韩旺
时代农机 2011年7期
王 健,贺 鑫,韩 旺
(中国地质大学(武汉)机械与电子信息学院,湖北 武汉 430074)
目前四足步行机器人的研究主要集中在小型轻便、易于控制等方面。本文设计的稳步四足机器人,重点在机器人足迹的设计和分析上,能够保证机器人在行走过程中,整个机身的平移在一条直线上,而不上下或左右颠簸。
1 稳步四足机器人总体结构设计
设计该机器人主要的目标是四足、平稳,目的是实现预想中的足迹要求,达到理想的分析结果。图1所示的是机器人半边身体退步机构简图及预想足迹,包括机器人“足迹”四杆机构、“衔接处”曲柄摇杆四杆机构、间歇凸轮机构设计。
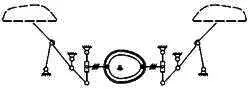
图1 机器人半边身体退步机构简及预想足迹
2 各部分结构设计及其计算
2.1 机器人“足迹”四杆机构设计
这部分在整个机构中起到最终执行的作用,对这部分的机构设计主要考虑到稳定性的要求。
(1)足端轨迹要求。行走机构在行走过程中,每条腿依次经过抬腿,前伸,支撑着地带动机器人前进等周期性过程,因此其足端轨迹必须满足如下3个要求:①支撑着地的时候足端轨迹必须满足近似直线要求,抬腿时的轨迹必须近视圆弧,且为轴对称曲线;②为减少和消除抬腿和落地产生的冲击和滑步,足端在抬腿及落地时的轨迹应平滑过渡到圆弧段;③为了使行进协调,游足时间(抬腿时间)应小于支撑时间。据此,采用的轨迹如图2所示。取直线段距离ab大于等于35mm,垮高为10mm左右。

图2 轨迹图
(2)步态要求。对于足式机器人来说,其稳定性主要取决于步态。 步态是步行机器人的一种迈步方式,是步行机器人各腿协调运行的规律,即各腿的抬腿和放腿顺序。目前比较常见的步态主要有爬行步态(crawling gait)、对角小跑步态(trotting gait)、溜蹄步态(pacing gait)、跳跃步态(bounding gait)等。采用对角小跑步态(trotting gait)。如图3所示。

图3 足式机器人步态
(3)行走部分的机构选型。四杆机构中能作为机器人腿部机构的有多种,如埃万斯机构、切比雪夫连杆机构、罗伯特连杆机构。根据我们所设计机器人的足迹要求,采用埃万斯连杆机构。机构设计简图如图4所示。

图4 机构设计简图
取BC=CE=CD,在solidworks软件中建好模进行尺寸试定,最终确定尺寸并在matlab软件中进行运动分析,得出结果如图5所示。

图5 matlab软件中进行运动分析图
E点的水平速度有一段内凹曲线,内凹的弧度很小,变化比较平滑,加之位移曲线在此段也近似为直线运动,故可近似看为是匀速直线运动。
2.2 “衔接处”曲柄摇杆四杆机构设计
此机构为机器人腿部传递动力,采用对心曲柄滑块机构,如图6所示。

图6 对心曲柄滑块机构图

在Matlab软件中进行轨迹分析,得出推杆位移规律,如图7所示,近似正弦曲线。

图7 近似正弦曲线
2.3 间歇凸轮机构设计
凸轮在整个机构中起到协调的作用,用来实现四足机器人四条腿的协调。
分析:满足协调,则凸轮的一般周期内一腿运动,另一半周期内对称腿运动。例如:当θ=[0,π]时,左前足和右后足运动,左后足和右前足间歇;当 θ=[π,2π]时,左后足和右前足运动,左前足和右后足间歇。采用几何封闭滚子直动对心盘形凸轮,机构简图如图8所示。

图8 几何封闭滚子直动对心盘形凸轮机构简图
取基圆半径=20mm。利用CamTrax,进行凸轮设计和接触点速度分析,如图9所示。

图9 凸轮设计和接触点速度分析图
速度满足间歇性要求。
3 总结
由机器人足部的运动曲线不难看出,迈步近似直线,当机器人前行时,机身相对直线移动,从而保证了机身的平稳性,避免上下或左右颠簸。
[1]高桂仙,邱武俊.四足步行机器人步态规划及稳定性分析[J].制造业自动化,2010,(4)125-127.
[2]孙恒,陈作模.机械原理(第七版)[M].北京:高等教育出版社,2006.
[3]曲秀全.基于MATLAB/Simulink平面连杆机构的动态仿真[M].哈尔滨:哈尔滨工业大学出版社,2007.
[4]张建明,白景岭.理论力学[M].武汉:中国地质大学出版社,2006.
[5]马东兴,王延华,岳林.新型四足机器人步态仿真与实现[J].机械制造与研究,2008,(37).
[6]曹清林,陈建平,沈世德.曲柄摇杆机构对称连杆曲线的研究[J].机械科学与技术,1996,(7)
[7]邓小剑,张薇.推导滚子直动盘状凸轮轮廓线方程的简便方法[J].机械工程与自动化,2008,(10).
[8]R.B.McGhee,A.A.Frank.On the Stability Properties of Quadruped Creeping Gaits[J].Mathematical Biosciences,1968,(3):331-35l.
猜你喜欢
机械工程师(2021年4期)2021-04-19
南方农机(2021年3期)2021-02-07
湖北农机化(2020年17期)2020-11-02
机电工程技术(2020年2期)2020-03-26
设备管理与维修(2019年22期)2019-12-19
制造技术与机床(2019年8期)2019-09-03
精密制造与自动化(2018年1期)2018-04-12
制造技术与机床(2017年5期)2018-01-19
中南大学学报(自然科学版)(2016年2期)2017-01-19
山西大同大学学报(自然科学版)(2016年2期)2016-12-12
