某微型电动汽车转弯特性虚拟试验仿真分析
2011-08-21 07:22:00汪振兴李万祥何剑峰
车辆与动力技术 2011年4期
汪振兴,李万祥,何剑峰
(1.兰州交通大学机电工程学院,兰州 730070;2.同济大学汽车学院,上海 201804)
传统汽车开发流程需经过多轮样车试制,反复的道路模拟试验和整车性能试验,不仅花费大量的人力、物力,延长设计周期,而且有些试验因其具有危险性而难以进行.利用计算机仿真整车试验来开发新车型,已成为汽车设计不可或缺的技术[1-2].
通过标杆车试验和设计中的CAD模型提取有效参数,对某设计中的微型电动汽车建立ADAMS整车模型,并利用理论计算和仿真试验,分别验证了子系统模型的正确性,以保证模型的可靠性.之后依据国标进行了两项转弯虚拟仿真试验,针对仿真结果进行了计算评价分析,为后期整车优化设计提供理论参考[3].
1 整车虚拟仿真模型
1.1 动力学分析原理
ADAMS/car动力学分析原理是利用带拉格朗日乘子的第一类拉格朗日方程导出最大数量坐标的微分方程.它选取系统内每个刚体质心在惯性参考系中的3个直角坐标和确定刚体方位的3个欧拉角作为笛卡尔广义坐标,用带乘子的拉格朗日第一类方程处理具有多余坐标的完整约束系统或非完整约束系统,导出以笛卡尔广义坐标为变量的动力学方程.
1.2 基本参数的确定
整车多体系统的硬点参数、惯性参数通过三维实体CAD软件CATIA等计算得到.根据设计好初始三维模型,添加材料特性参数后,计算出整车及零部件质量、质心位置、转动惯量等模型数据.结构和材料复杂的零部件采用试验方法或经验公式获得其质量和转动惯量.减振器阻尼特性曲线和弹簧的刚度特性曲线由制造商提供图纸或者通过试验测定.由于处于设计阶段,橡胶衬套参数取相似车型替代;整车参数如图1.
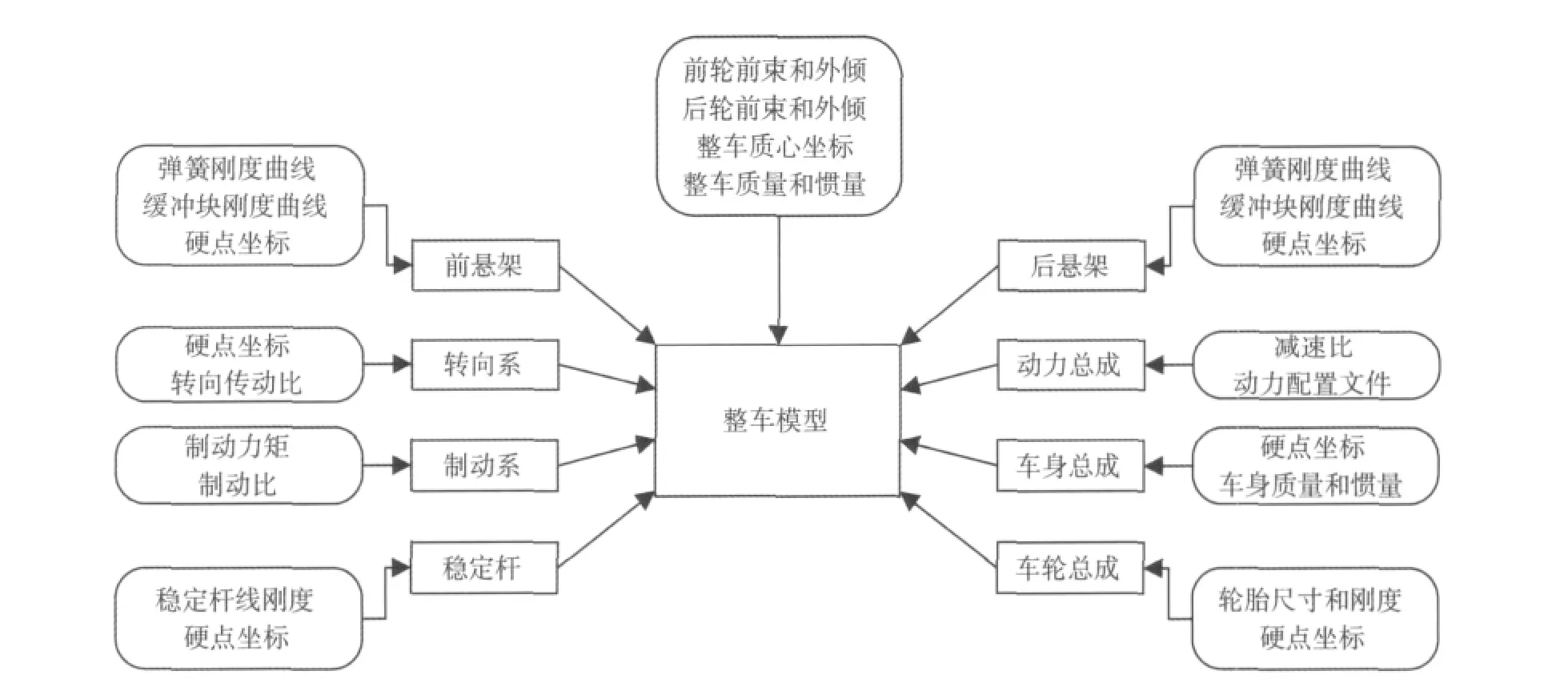
图1 整车参数树图
1.3 模型创建和验证
在ADAMS/car中使用模板创建整车的子系统:前悬架,后悬架,转向系,制动系,车轮,动力传动系,车身总成,前稳定杆.在ADAMS/car悬架仿真模块中对前悬架和后悬架进行K&C仿真分析,校对4轮定位参数、弹簧刚度、缓冲块刚度来保证模型的正确性;然后装配创建整车模型.自由度为94的刚柔混合模型如图2.
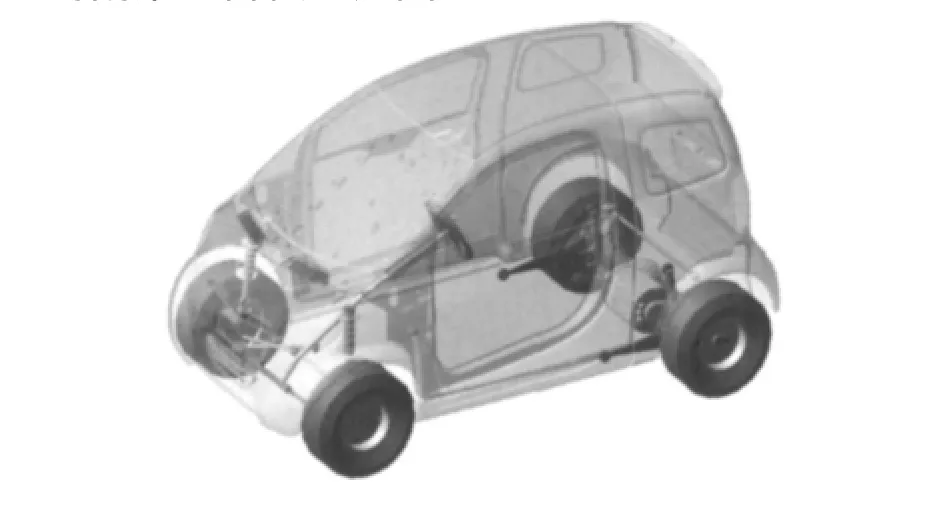
图2 ADAMS整车模型
2 仿真试验与分析
2.1 稳态回转工况仿真与分析
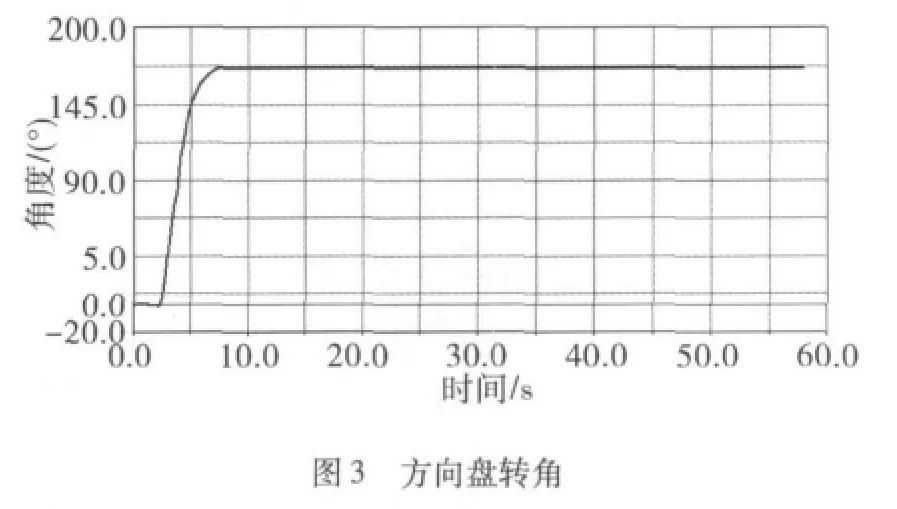
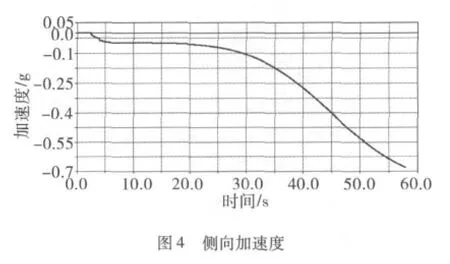
汽车横向动力学线性理论指出,稳态转向特性决定了汽车作为一个动力学系统在转向输入下是否稳定的充分条件.试验方法参照GB/T 6323.6-94进行仿真[4],先输入一个固定的方向盘转角,通过车速来改变侧向加速度,使侧向加速度达到6.5m/s2或到电机功率所能达到的最大的侧向加速度,如图3、图4和图5.仿真试验侧向加速度达到了6.9 m/s2
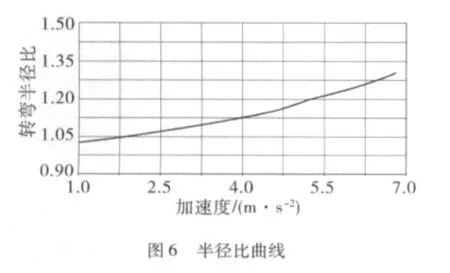
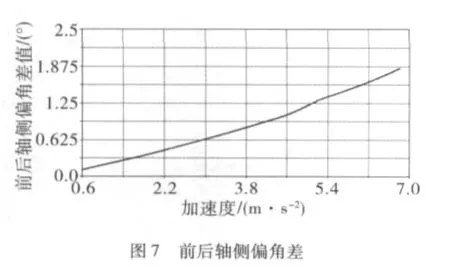
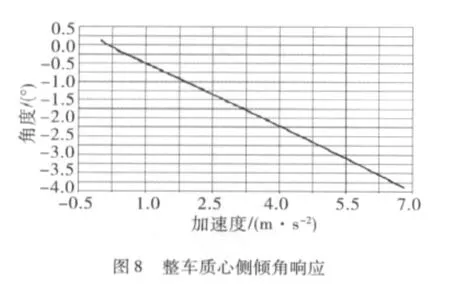
由转弯半径比Ri/R0与侧向加速度ay关系曲线图6可以看出该车当整车的侧向加速度增大时,瞬时转弯半径和起始转弯半径的比值逐渐增大,说明该车具有一定的不足转向,而且随着侧向加速度的增加到达6.5 m/s2,并没有出现中性转向点an,这是因为轮胎进入了非线性工作区域的缘故[5].通过前后轴侧偏角差值(α1-α2)与侧向加速度ay的关系曲线图7可以得出侧向加速度为2 m/s2时,可计算出不足转向度U为0.545(°)/m.s-2.一般的前后轴侧偏角差在侧向加速度4 m/s2为2°最佳,而该车只有0.97°,不利于汽车的操纵稳定性[4].从车身侧倾角与侧向加速度ay的关系曲线图8可以得出侧向加速度为2 m/s2时的车厢侧倾度KΦ为1.073(°)/m.s-2.

试验仿真数据按QC/T 480—1999中给出的评价方法分别计算出评价对象的值,再根据标准中给出的公式进行评价计分,结果如表1.从数据分析该车的稳态回转试验结果总评价得分为88.83,符合试验标准.
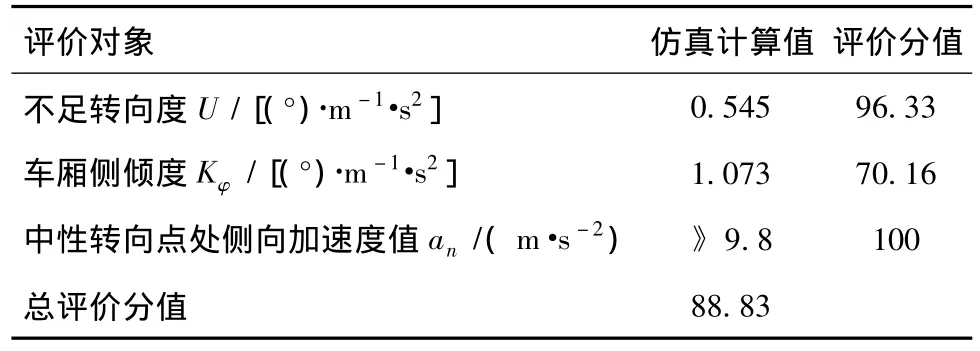
表1 稳态回转评价对象
2.2 低速回正性工况仿真与分析
回正仿真试验是评价汽车由曲线行驶自行恢复到直线行驶的过度过程的性能,试验方法参照GB/T 6323.4-94进行仿真[4],如图9和图10让汽车直线行使,调整方向盘转角,使汽车沿半径为(15±1)m的圆周行使,调整车速,使侧向加速度达到 (4±0.2)m/s2,固定转向盘转角,稳定车速并开始记录,待3s后,突然松开转向盘,至少记录松手后4s的汽车运动过程,记录时间内油门开度保持不变.


由横摆角速度时间历程曲线图11可以得出起始横摆角速度为28.87(°)/s;车身横摆角速度达到新的稳定状态的稳定时间为3.3s;松开方向盘3s时刻的残留横摆角速度值为2.75(°)/s.通过图11分析导出仿真数据,可以计算得出横摆角速度总方差为0.292.
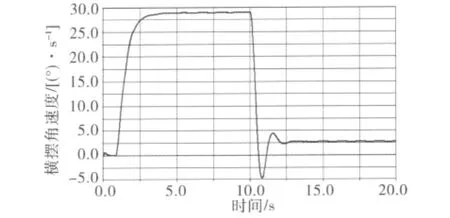
图11 横摆角速度响应
试验仿真数据按QC/T 480—1999中给出的评价方法分别对残留横摆角速度和横摆角速度总方差进行评价计分,如表2,其中对残留横摆角速度评价得分为45,说明残留的横摆角速度偏大,从影响该指标的因素分析,后期应针对悬架系统、转向系统进行优化及对轮胎的合理选择.但是,最后总体评价分值为72.5.
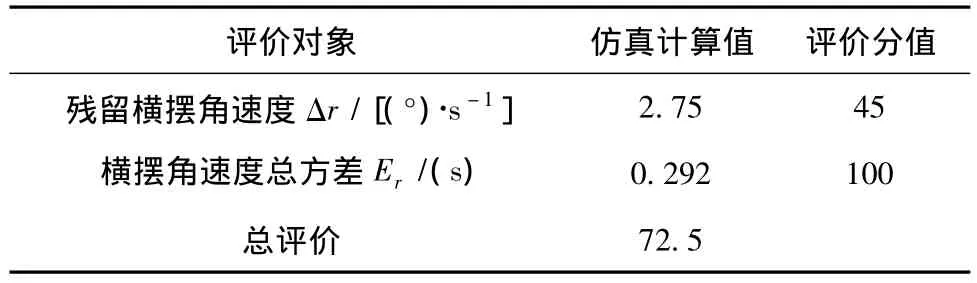
表2 转向回正评价对象
3 结论
1)从稳态回转虚拟仿真分析该车具有不足转向特性,随着侧向加速度的增加,没有出现中性转向点,且不足转向趋势是发散的.
2)转向回正试验中对低速回正的残留横摆角速度评价得分较低,说明残留横摆角速度偏大,但从总评价指标值来看,是符合国家标准的.
3)结合其他分析和设计标准为后期优化改进高速稳态特性和低速回正提供理论依据.
[1] 任卫群.车-路系统动力学中的虚拟样机:MSC.ADAMS软件应用实践[M].北京:电子工业出版社,2005.
[2] 郝云堂,金 烨,季 辉.虚拟样机技术及其在ADAMS中的实践[J].机械设计与制造,2003(3):16-18.
[3] 陈 军.MSC.ADAMS技术与工程分析实例[M].北京:中国水利水电出版社,2008.
[4] GB/T6323-1994汽车操纵稳定性试验方法[S].
[5] 海贵春,谷正气,骆 军,等.某SUV车稳态转向特性分析与优化[J].系统仿真学报,2009(7):2068-2071.
猜你喜欢
大电机技术(2022年3期)2022-08-06 07:48:24
核科学与工程(2021年4期)2022-01-12 06:30:04
北京航空航天大学学报(2021年4期)2021-11-24 01:12:56
煤气与热力(2021年4期)2021-06-09 06:16:54
中华戏曲(2020年1期)2020-02-12 02:28:18
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
光学精密工程(2016年3期)2016-11-07 09:03:52
通信电源技术(2016年1期)2016-04-16 04:57:35
火控雷达技术(2016年1期)2016-02-06 02:18:01
西北工业大学学报(2015年1期)2016-01-19 03:29:56