基于MATLAB/Simulink的舰船电力推进四象限负载模拟系统的仿真研究
2011-07-25 08:14:08刘鹏
船电技术 2011年3期
刘 鹏
(中国船舶重工集团公司第七一二研究所 青岛分部,武汉 430064)
1 引言
舰船综合电力推进是世界船舶动力的发展趋势之一,是现今各国船舶研究的热点。在传统舰船电力推进系统试验中,一般都是使用水力测功机作为推进电机的测试负载。试验时,推进电机通过传动轴与水力测功机连接,带动水力测功机旋转,产生的机械能转化为热能被水力测功机吸收。这种电力推进系统测试方法虽然具有结构简单、安装方便、控制容易的优点,但是试验产生的能量被白白浪费,能量利用率很低,特别是容量较大的推进系统,能量浪费更加严重。水力测功机最为突出的缺点是其无法模拟完整的舰船螺旋桨曲线特性,使得推进系统试验数据很难接近实船参数。
本文研究的是四象限负载模拟系统,这一负载系统不仅能够模拟实现推进电机的电动及其发电状态的四象限运行,为电力推进系统试验提供先进的模拟负载,而且可以将被试推进电机旋转产生的机械能转化为电能回馈到电网中,使得试验能量利用率显著提高。文章首先研究了四象限变频系统的控制策略,然后使用MATLAB/Simulink软件搭建了整个试验系统的仿真模型,仿真结果验证了四象限模拟负载系统设计的可行性。
2 舰船电力推进系统试验原理
试验原理如图1所示。试验设备包括四象限负载系统,电力变压器、传动轴、扭矩传感器以及试验所需的其他辅助电源等。四象限负载系统主要由负载变频电机、负载变频器及其控制单元组成。被试电力推进系统包括被试推进电机及其变频器。被试电力推进系统与试验室设备连接后进行测试试验研究。被试推进电机通过传动轴与负载变频电机相连,中间的扭矩传感器用于测量电机转速和转矩。整个系统由中压电网供电,通过电力变压器将电网电压转换为试验所需的电压等级。
四象限负载系统的负载变频器是交-直-交变频器,其中整流单元是三相有源前端(AFE)整流,中间是直流电容单元,逆变单元是三相桥式全控型逆变器,对整流单元和逆变单元均采用PWM控制,控制单元包括PWM控制电路以及电机控制的软硬件结构。控制单元采用微处理器控制技术,通过对变频电机的控制,使得变频电机工作在预先设定的转矩-转速特性四象限曲线上,达到对推进系统进行模拟加载的试验目的。
2.1 整流单元控制策略
整流单元使用全控型IGBT组成三相全桥电路,使用空间矢量控制策略,并采用电流内环和电压外环的双闭环控制,这一控制策略可实现整流器电网侧的单位功率因数和电能的双向流动[1]。控制策略如图2所示,直流电压外环控制是将输出直流电压Udc与给定值进行比较,偏差送入 PI调节器,PI调节后的输出值作为电流给定值。电流内环控制首先将输入电流ia、ib、ic经过坐标变换为id、iq。坐标变换后的d轴分量id表示电流的有功分量,q轴分量iq代表无功分量。为实现功率因数是1,取q轴电流给定值为0。对d、q轴电流分别进行PI调节控制,调节输出送入SVPWM脉冲产生单元,得到整流器开关管的触发脉冲[2]。
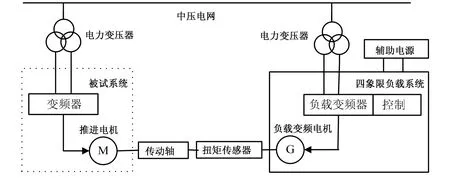
图1 测试系统原理
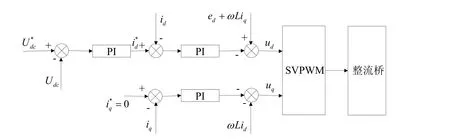
图2 整流控制策略框图
2.2 逆变单元控制策略
逆变单元的结构与整流单元相同,也是由全控型IGBT组成的三相桥式电路,采用的是直接转矩控制(DTC)得到开关管的触发脉冲,直接转矩控制避免了复杂的坐标变换,可实现对电机转矩和定子磁链的直接控制。控制策略框图如图3所示,对电机的电磁转矩和定子磁链与相应给定值比较得到偏差,其中电机的电磁转矩和定子磁链依据定子磁链的“u-i”模型和电磁转矩模型公式[3]计算得到。转矩误差与磁链误差的控制均采用滞环调节(Bang-Bang),滞环的宽度可以通过软件调节。最后根据转矩矩滞环调节器输出值、磁链滞环调节器输出值以及磁链的相位角选择合适的定子电压空间矢量。
3 MATLAB/Simulink仿真模型和结果分析
舰船电力推进四象限负载模拟系统MATLAB/Simulink仿真模型如图4所示。仿真参数为:三相电源有效值为10 kV,变压器一次侧10 kV、二次侧690 V,电机额定功率3 MW,额定电压690 V,额定转速150 rpm。设定直流单元直流给定值为1000 V,电机给定转速为150 rpm,电机加速率为 180 rpm,电机启动时外部负载转矩为0,在1 s时施加80 kN·m的负载转矩,在1.5 s时施加-80KN.m的负载转矩。
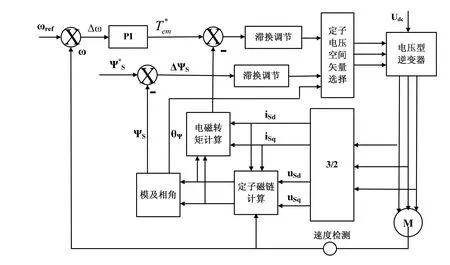
图3 逆变器控制策略框图
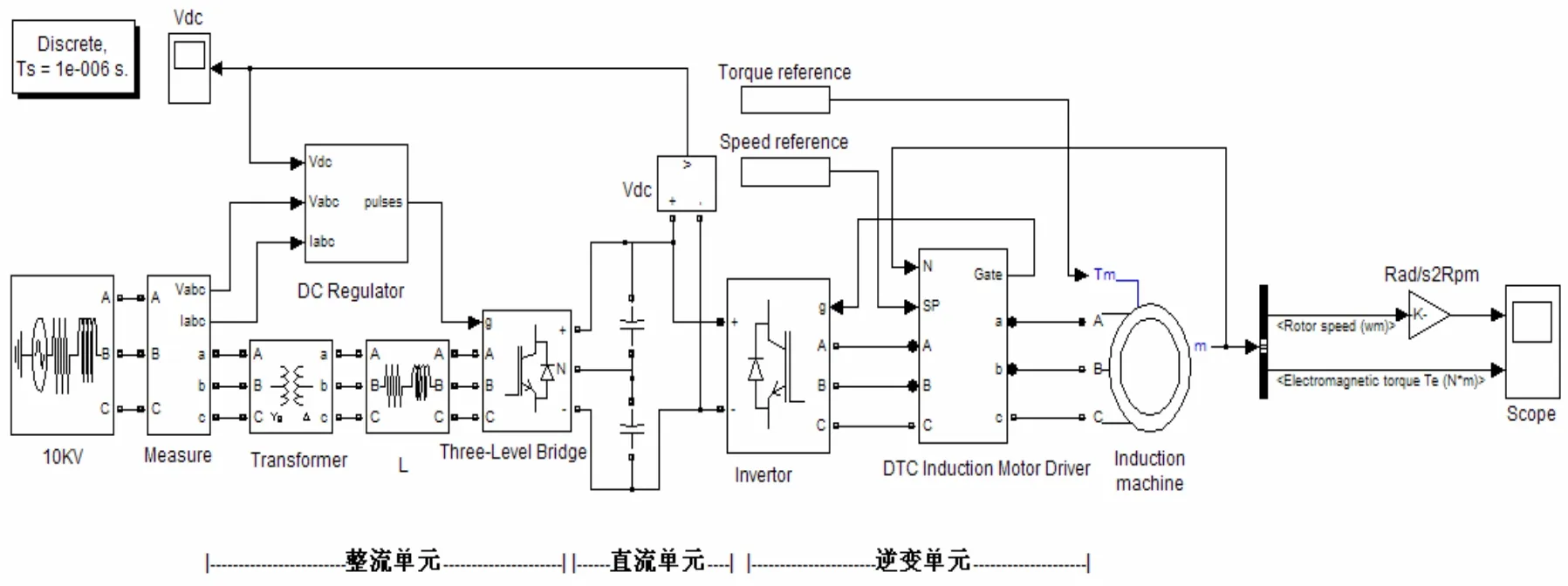
图4 四象限负载模拟系统仿真模型
电机转速和输出转矩仿真结果如图5和图6所示。电机0 s开始启动,在0.85 s时启动完毕,转速达到额定转速。在1 s和1.5 s分别施加与电机转速反向以及同向的负载转矩,其中1 s到1.5 s,电机带动负载转动,电机处于电动状态;1.5 s到2 s,负载拖动电机旋转,电机处于发电状态。
图7为系统启动时整流输出直流电压波形。直流电压经过一段时间调节后达到稳定,并能准确地跟踪指定电压1000 V,具有很好的动态和稳定性。图8为整流单元工作稳定后输入相电压和电流稳态波形。由于交流电压和电流数值相差很大,为便于两者波形对比,图中将电压和电流值进行了归一化处理。由波形图可以看到输入交流电流为正弦形,并且与输入交流电压相位相同,实现了单位功率因数。
在1.5 s时,电机转入发电状态,直流电压有小幅上升即有泵生电压产生,如图9所示。但随后就下降到给定值,同时输入交流电流和输入交流电压相位反向,如图10所示。整流器工作在有源逆变状态,即将电机的发电产生的电能回馈到了电网中[4]。
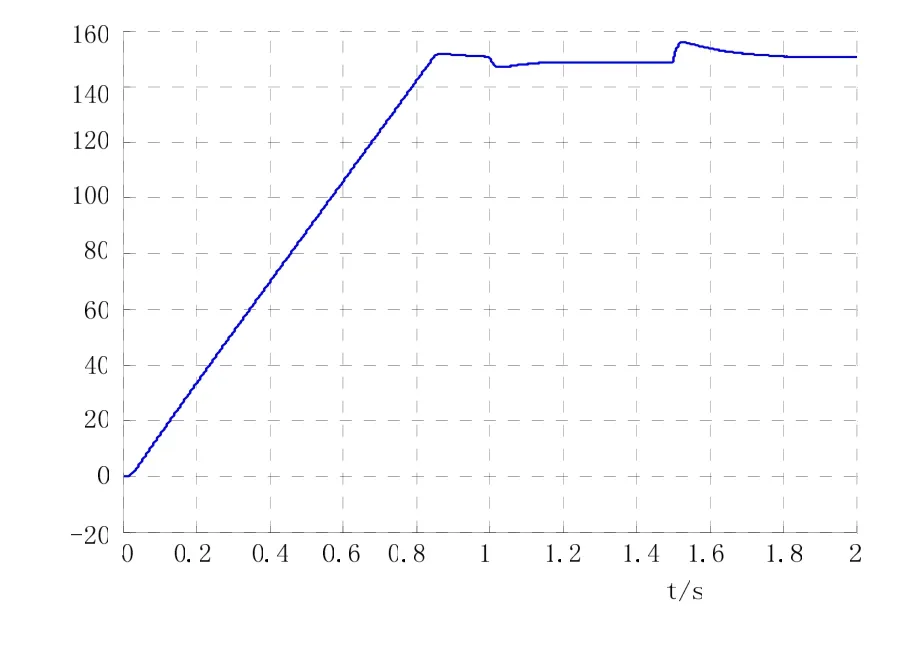
图5 电机转速仿真图
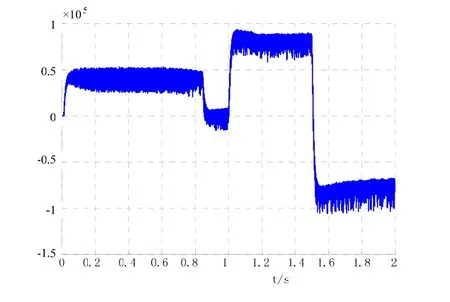
图6 电机输出转矩仿真图
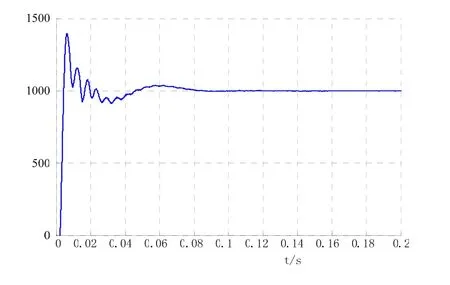
图7 整流输出直流电压波形图
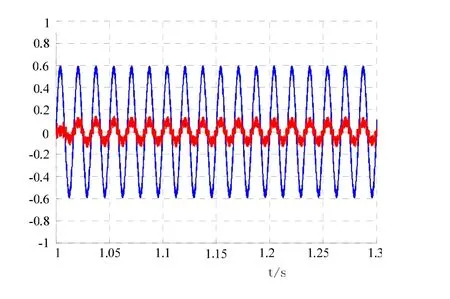
图8 输入相电压和电流稳态波形图
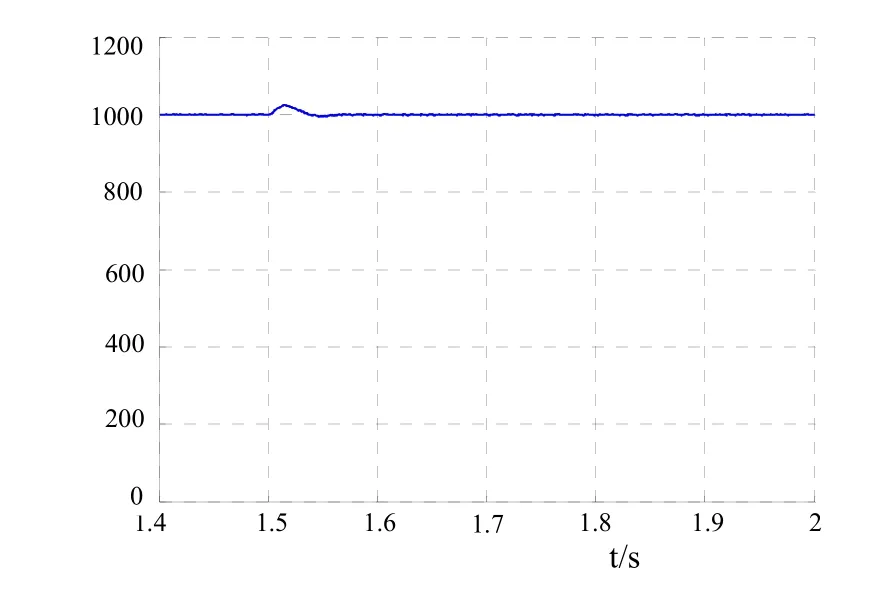
图9 电能回馈时直流电压波形图
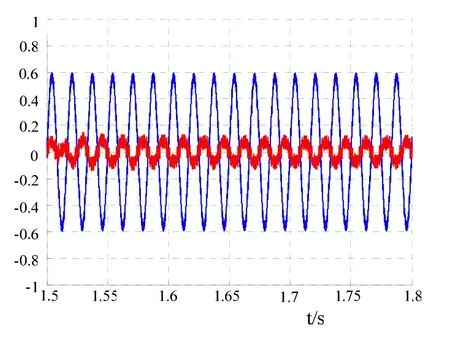
图10 有源逆变时输入相电压和电流波形图
4 结束语
在对四象限模拟负载系统的工作原理、控制策略研究的基础上,使用 MATLAB/Simulink软件建立了舰船电力推进系统四象限负载模拟系统的仿真模型。仿真波形表明整个试验系统能够实现电能的双向流动,验证了系统设计的正确性和有效性。
[1] 童亦斌,陈瑶,金新民. 三相电压型PWM整流器建模与控制研究[J]. 机车电传动,2007,(4):15-18.
[2] 马耀辉,尹华杰,汪万维. 三相电压型PWM整流器空间电压矢量控制仿真[J]. 防爆电机,2009,(2):15-19.
[3] 丁荣军.黄济荣. 现代变流传动技术与电气传动[M].北京:科学出版社,2009.
[4] 初升. 四象限变频器技术介绍[J]. 变频器世界,2006,(10):78-80.
猜你喜欢
中学生数理化·高一版(2022年3期)2022-04-05 08:17:14
四川冶金(2018年1期)2018-09-25 02:39:26
电子测试(2018年11期)2018-06-26 05:56:04
中学生数理化·七年级数学人教版(2017年4期)2017-07-08 11:48:34
通信电源技术(2016年1期)2016-04-16 04:57:26
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
中学生数理化·七年级数学人教版(2015年3期)2015-05-30 10:48:04
电机与控制应用(2015年3期)2015-03-01 03:49:59