基于CCD的动态光电测角仪的设计与实现
2011-07-12 12:29杨志丹
电子测试 2011年4期
杨志丹 , 王 缜
(1 海装天津局 北京 100076;2 北京航天发射技术研究所 北京 100076)
0 引言
在海洋中测量,船舶上经常使用测量方位的监测设备,该设备要实时监测目标的方位角度变化。大部分高精度的监测设备是静态下的检测,而海洋测量是船舶在航行的动态条件下监测,目前动态条件下角度监测的精度不高。本文提出采用CCD电子技术为核心,通过光、机、电的有机结合实现方位角度的实时动态高精度测量。
1 设计方案及实现
1.1 总体方案
本系统由两部分组成:测量部分和控制部分。如图1所示。
1.2 结构原理
激光光源发出的光经分光镜一、调焦镜、分光镜二、物镜至被测棱镜,其中一路光经过物镜、分光镜二至光电耦合器(CCD),另一路光经物镜、分光镜二、调焦镜、分光镜一至目镜。被测棱镜与光轴之间的夹角θ可在目镜处观察该角度,同时通过CCD进行光电转换,再经计算机处理在显示器上显示该角度,精确到秒级。

图1 总体结构示意图
该仪器涉及光学、机械和电子技术,实际产品结构复杂。其结构原理如图2所示。

图2 结构原理示意图
1.3 光电测角原理
该检测仪器的光源发出的光会聚在狭缝上,狭缝在物镜焦面上,经过分光棱镜一并通过物镜变成一束平行光。如果平面反射镜法线与物镜主光轴平行,平行光经反光镜原路返回会聚在物镜焦点X0处。此时采集CCD的像素位置,作为检测仪的电零位。当平面反光镜偏转一个角度A时,平行光返回后会聚在物镜焦面Xl上。
根据光学原理,有下面关系式:


如果精确测量出此时光斑在CCD上的位置Xl,就可以计算出偏移量L,从而根据公式计算出反光镜的偏转角A,实现测角功能,如图3所示。

图3 测角原理示意图
CCD(Charge Coupled Device)又称为电荷耦合器件,是在半导体材料上精确刻度了光敏感像素,两两相邻的像素具有相同的间距(就像一把直尺上的刻线)。每个像素都是一个光电敏感部件,它能将接收的光能量转换成相应的电荷并存贮。如图9所示的CCD光敏面局部放大。在转移时钟的驱动下,CCD按照像素的排列顺序依次输出每个像素上存贮的电荷。CCD具有光电转换、存贮和光电扫描的功能。可以根据每个像素输出的信号,确定光斑在CCD上的像素位置,再通过光能量积分确定光斑的中心位置,进而解算出被测平面的转动角度。
1.4 测角电路
测角电路电原理图如图4所示。

图4 测角电路电原理图
通过配置CPU的管脚,使T1PWM输出如图5的场同步信号,使T2PWM输出如图4的主时钟信号,主时钟信号通过计数器54HCT161四分频后,得到如图5的CCD时钟信号。A/D时钟信号是通过54HCT161二分频后得到的,与CCD时钟严格同步。A/D转换器设计成自动转换模式,通过A/D时钟触发,转换后的A/D数据自动输出。A/D时钟和A/D数据与CCD驱动时钟对应关系见图5。

图5 时钟信号时序
1.5 具体实现过程
硬件测角电路分析, CCD测角的软件模块共两个:一个是初始化模块;一个是读CCD信号模块。
初始化模块涉及CCD部分的流程图如图6所示。设备开机或软件复位后,首先置IOPC7管脚低电平,使54HCT161计数器复位,即54HCT161所有输出管脚均为低电平状态。其次,配置T1PWM和T2PWM管脚为输出可编程脉宽调制管脚,并使二者同步输出,设置CPU内部计数器T1、T2,使计数器周期和相位满足图5的要求。最后,同时启动计数器T1、T2开始计数,并对应选通T1PWM和T2PWM的输出,给外部CCD芯片提供驱动时钟。
读CCD信号模块的流程图如图7所示。软件首先检测场同步信号的下降沿,之后按照A/D时钟的速率,以严格的程序执行时间来读取A/D转换的数据,像素计数器记录对应于A/D转换结果的CCD像素位置。读CCD信号模块实现的时序如图5所示。图中软件读数据时序(D0、D1、……,S1、S2、……S1024)与CCD信号输出是一一对应的。
2 精度分析
通过光学基准传递、光电测量控制、动态数据合成,然后传递给计算机,实现实时动态方位角度测量。因此,精度主要由光传递精度、动态数据处理精度组成。这里重点讨论动态数据处理精度,它由船舶姿态信号采集时刻和CCD信号采集时刻的不同步误差、采样点积分误差、船舶姿态信号采集时刻与测量信号发出时刻不同步误差组成。
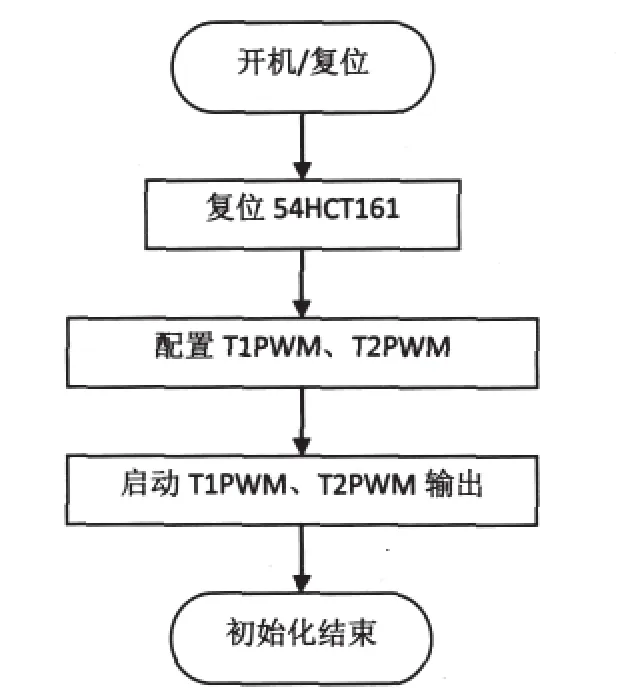
图6 初始化流程

图7 读信号流程
2.1 动态数据处理精度
2.1.1动态数据时序关系处理误差
船舶惯导信号输出及CCD测角信号处理的时序关系见图8。
图中:
t1: 船舶姿态信号采集时刻到同步信号有效输出的间隔时间,小于300μs;图中:

图8 惯导信号与CCD信号时序关系
t2:船舶姿态信号在线路上的通信时间,通过通信波特率和帧字节数可计算出通信时间, t2=6.875ms;
t3:微处理器接收到船舶姿态同步信号,到检测到CCD场同步信号的间隔时间,不大于CCD场时钟周期(2ms);
t4:CCD信号采集及处理时间,不大于2ms;
t5:被测平面镜偏差角计算及结果判断时间,不大于2ms。
2.1.2 船舶姿态信号采集时刻和CCD信号采集时刻不同步产生的最大计算误差
两个数据不同步时间为t1与t3之和,横摇最大角速度1.5°/s,纵摇最大角速度1.0°/s,航向变化最大角速度0.4°/s, 最大横摇角4.5°,最大纵摇角5.0°。
CCD实时测出被测平面镜法线与光管光轴的夹角(在大地水平面投影(t) ,微处理器接收船舶姿态角信息,计算出船舶的摇摆对基准光线在水平方位上的偏差ΔR(t),用ΔR(t)对(t) 进行修正,便得出被测平面镜法线与基准光线的夹角 Δ(t):

测角偏差角ΔR修正算法:

式中:R为船舶的横摇角速度;P为船舶的纵摇角;t为信号不同步时间。
船舶姿态信号采集时刻和CCD信号采集时刻的不同步,两个数据不同步时间为t1与t3两者之和,若横摇最大角速度1.5°/s,最大纵摇角5.0°,产生的测角偏差角修正ΔR最大计算误差简化为:

2.1.3 CCD信号采集及处理误差
在CCD的积分时间T内,载有被测信号的光点从XO运动到XL,这两点的中点位置即是采样点,如图3所示。在实际测量中,以在积分时间内光点扫过的线段中点对应的位移为采样点,它与积分时间中点对应的位移的差值△L为信号采集处理误差。

由于船舶、被测平面镜均是动态的,相对CCD而言,ω角速度是偏航角、横摇角、纵摇角及被测平面镜转动角角速度的合成,其值不易确定。在实际工作中,往往通过仿真确定误差范围,并通过实验验证。
本产品在偏航角幅值AH=0.7°,周期TH=8s;横摇角幅值AR=3.5°,周期TR=4s;纵摇角AP=2°,TP=10s;被测平面镜转动角幅值Az=3°,周期Tz=3.5s时,测得其信号采集处理误差为10.12″~13.51″。
2.1.4 船舶姿态信号采集时刻与准直信号发出时刻不同步产生的误差
两个数据不同步时间为t1、t2与t5三者之和,若偏航角最大角速度不大于0.4°/s,则最大误差为:
0.4 °×(t1+t2+t5)= 0.4°×(0.3+6.875+2)ms=13.21″
2.2 光传递误差
CCD器件输出电信号受光敏面上的光能量即曝光量的影响,因此与光敏面的照度有关,确定光斑在CCD上的几何中心是通过光敏面上光能量分布进行积分求出能量中心在CCD上的位置。如图9所示,光斑2、3在光敏面上的能量分布分别为4、5 。光传递误差主要有两种情况形成。一种情况是光斑切割等原因导致光能分布不均匀,导致的误差,如图9中的4为正常情况下光能量分布,5为照度不均情况下的能量分布,△x为实际测量值与真实光斑中心的误差。另一种情况是照度不匹配带来的误差,即当照度过高导致曝光量超过饱和曝光量使描述的被测信号发生畸变,或当照度过低导致曝光量低于CCD灵敏阀值使被测信号无法提取,导致小信号无输出引起的被测信号发生畸变。

图9 光能分布误差示意图
本产品中通过增加光阑、磨毛光源出光玻璃和镀增透膜等光学设计减少光的分布不均匀,并通过采用可调半导体激光光源和添加滤光镜等方法使曝光量控制在灵敏阈值和饱和曝光量之间。
本测角仪误差计算公式:

式中:△为总误差,σi为各误差项。
经分析计算和试验检测△为34~40″。
3 结束语
当海况在三级以下、被测物角度变化频率≤5Hz,本文研制的动态测角仪测角总误差不大于40″。该仪器具有体积小、动态精度高、性能稳定可靠等特点,适用于船舶等海上动态作业平台上进行实时角度测量。
[1]王庆有.CCD应用技术[M].天津:天津大学出版社,2002.
[2]徐家骅.工程光学基础[M].北京: 机械工业出版社,1988.
[3]杨志丹,张治杰.某光电检测仪典型问题的分析解决[J].宇航计测技术,2010(4).
[4]金 宁,李 力,曹红曲,明景谦.对光电系统中的光学系统二次成像的分析计算[J].红外技术,2007(7).
[5]石顺祥,刘继芳.光电子技术及其应用[M].北京 : 科学出版社, 2010.
[6]刘淑英.电子技术与实践[M].北京 : 机械工业出版社, 2010.
猜你喜欢
诗歌月刊(2023年1期)2023-03-22
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
航天电子对抗(2018年3期)2018-07-14
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
光学精密工程(2016年3期)2016-11-07
测绘科学与工程(2016年6期)2016-04-17
中国医疗美容(2015年1期)2015-07-12
雷达学报(2014年4期)2014-04-23