
电动汽车电池更换机器人三维监控设计与实现
2011-07-07 08:48孙广明赵明宇汪映辉
制造业自动化 2011年22期
孙广明,赵明宇,汪映辉,储 毅
(国网电力科学研究院,南京 210061)
0 引言
近几年计算机硬件发展突飞猛进,对三维可视化技术的优化以及性能有了很大的提升,极大地促进了三维表现形式的发展。随着国家对新能源技术的大力推动,电动汽车成为了新能源发展的热点,为了解决电动汽车快速能量补给的问题,电池更换模式逐渐得到应用与推广。为提高电池更换效率,电池更换设备必须向自动化、智能化方向发展,通过引入采用机器人技术的高度自动化智能电池更换设备可以较好地解决这一问题[1]。目前电动汽车换电站大都配备了监控系统,来确保电池更换设备的安全运行,但目前电动汽车电池更换机器人的监控技术基本都停留在以二维的方式表示,主要是基于抽象符号的系统,不能给人以自然界的直观感受,大量的多维空间信息无法得到利用,同时还有些技术无法得到实现,例如离线示教技术[2]。
本文针对当前快速发展的电动汽车电池更换机器人监控技术以及电池更换机器人的几何建模和运动学建模进行了研究和总结,设计和实现了电动汽车电池更换机器人的三维实时监控和电池更换设备的离线示教功能,极大地方便了用户对换电机器人的全景监控,同时不仅可以有效节约电池更换机器人示教带来的资源和大量时间的浪费,而且提高了电池更换机器人的运行效率,同时对低碳环保也具有一定的现实意义。
1 电池更换机器人三维实时监控设计
要实现对电池更换机器人的三维实时监控,首先需要对机器人和电池更换场景进行几何建模和运动学建模,然后通过三维实时监控程序读取模型文件进行显示,数据采集和处理模块则实时采集换电设备的状态,对运动学模型进行动态改变状态,采用双缓冲的方式进行三维实时监控界面展示,实现电池更换机器人的三维全景实时监控。
机器人三维实时监控采用模块化、弱耦合的设计方式来实现,所有外部模型的存储都采用文件系统,这样可以方便地实现与其他系统通信,同时方便采用三维建模软件3DMax来完成几何建模的过程,达到快速建模的目的。电池更换机器人三维实时监控的模块主要包括几何建模和运动学建模、换电机器人离线示教、数据采集和处理、文件系统和外部接口、视频联动等。系统各模块的相互结构关系如图1所示。
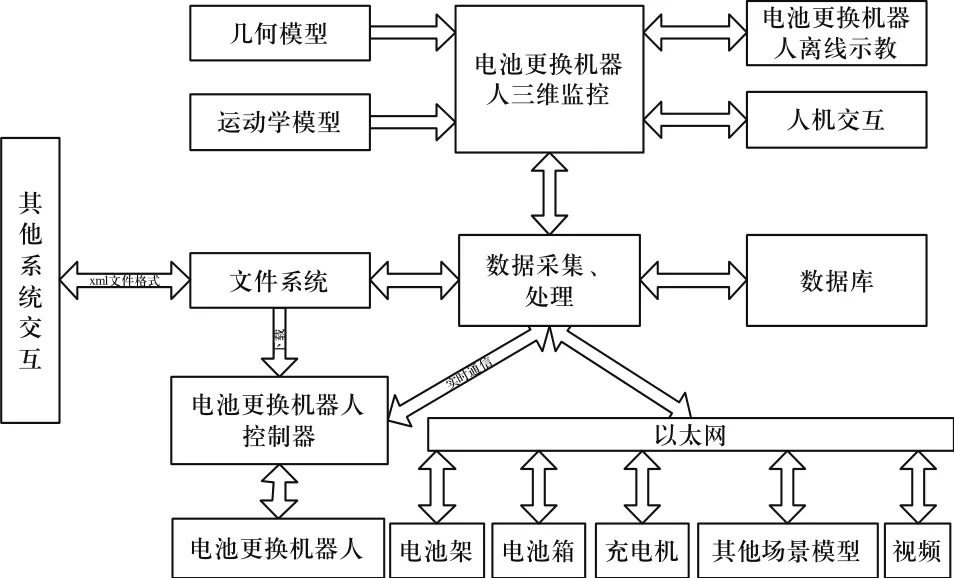
图1 电池更换机器人监控结构图
2 电池更换机器人三维实时监控实现
2.1 几何建模和运动学建模
几何建模就是通过运动透视等技术手段将电池更换机器人实体进行三维显示[3];为了进行离线示教,对几何建模要求很高,误差必须要在电池更换设备定位允许的误差之内;而运动学建模则是将电池更换机器人的连杆和关节抽象成数学概念上的线和点,建立适当的数学模型,以利用采集得到的变化参数,通过转换和计算得到不同时刻的状态参数。
单体几何建模可以通过成熟的三维建模软件3DMax进行建模,只需要导出为xml[4]格式的文件,然后通过本系统的组态软件来解析模型文件,从而建立单个对象模型,如图2所示。

图2 线性渲染的电动汽车、电池、电池架模型
对于机器人这种多关节的模型,在创建出单个对象后,往往需要利用各种关节将不同的对象链接起来,系统提供了铰链型、球-球窝型、滑竿柱型和固定型等类型的关节。其中铰链型为合页关节,滑竿柱型为插销关节,这些关节都有内置的马达。本系统选用铰链关节来连接驱动轮和电池更换设备车体,采用固定关节构建换电机器人车体结构。
下面以使用铰链关节连接两个对象为例,简单说明创建关节的方法。在调用jointCreateHinge函数创建铰链关节对象后,再调用jointAttach函数指定用该关节连接的两个物体对象,然后调用jointSetHingeAnchor函数设定旋转轴的中心点坐标,并调用jointSetHingeAxis设定旋转轴的方向。
采用线性渲染方式的电池更换机器人模型如图3所示。

图3 电池更换机器人模型
为了让电池更换机器人对象能够在仿真环境中运动起来,系统提供了三种方法:1)调用bodyAddForce、bodyAddTorque等函数给刚体施加力的作用;2)调用jointSetHingeParam函数来改变内置马达的转速,同时需指定该函数的第二个输入参数为paramVel;3)调用bodySetLinearVel和bodySetAngularVel两个函数直接给物体设定线速度和角速度。此外,在系统仿真环境中,可通过两种方式来模拟弹簧-阻尼系统:1)通过设置ERP (Error Reduction Parameter)和CFM (Constraint Force Mixing)两个参数来实现,ERP为每一仿真循环中的修正误差,取值范围为0~0.8,默认取值为0.2;CFM代表物理引擎的全局混合约束力,它反映物体表面的柔软程度,其取值范围为10e-9~1;2)利用动力学方程来求解,即胡克定律:

其中k为物体的劲度系数,x为物体形变量。考虑阻尼系数时,动力学方程为:

其中γ为阻尼系数,它与物体的形状以及周围性质相关。
2.2 数据采集和处理
监控系统采用工业以太网方式为物理介质、以国家标准工业通讯协议为通信规约和电池更换机器人进行通信,实时接收换电设备的状态,并对获得的数据进行数学计算、粗大误差剔除、线性优化处理,最后将处理后的数据传输给电池更换机器人三维模型来显示及入库操作,数据采集处理流程如图4所示。

图4 采集处理显示流程图
图4采用的数据采集处理流程,能够方便实现对电池更换机器人、电池架、电动汽车以及安防设备等进行三维实时监控显示,方便用户直观查看电池箱的充电状态、电动汽车的当前位置、电池箱的更换情况以及电池架上有无电池箱等信息。
数据采集部分不仅仅是从受控设备获取实时值,还可以接受三维实时监控程序发送的远程控制命令,并及时地传输给受控设备以控制设备的各种动作行为,从而保障设备的安全高效运行。
2.3 电池更换机器人离线示教
电池更换机器人离线示教[5]是利用计算机图形学的成果,建立电池更换机器人及其工作环境的几何模型,通过对图形的控制和操作,在离线的情况下进行轨迹规划。通过对示教结果进行三维图形动画仿真,以检验离线示教的正确性,最后将生成的代码传到电池更换机器人控制器,以控制电池更换机器人运动,完成电池箱更换任务。电池更换机器人离线示教结构图如图5所示。
2.4 环境监控联动

图5 离线示教结构图
电动汽车电池更换机器人三维监控实现了与环境监控的深度融合,在电池更换机器人出现异常情况时会触发环境监控联动机制,通过视频、消防、声光报警等方式记录处理现场情况,并通过内部预置的处理策略为用户实时提供相应的解决方案或自动进行异常事务处理,并在三维监控画面上得到实时响应。
2.5 人机交互
人机交互界面采用跨平台语言Qt4[6]进行设计和实现,用户在组态软件中对三维场景进行配置,设定各个模型的初始状态,并保存成xml格式的配置文件。三维实时监控软件读取配置文件和模型文件并通过OpenGL渲染显示。软件具有人性化操作方式和友好的交互界面,用户在三维实时监控画面上只需通过鼠标的简单操作就可以对三维监控画面进行平移、缩放、旋转等操作,进而实现对设备的全方位监控。
3 工程应用
三维实时监控技术已在电动汽车充换电示范站中得到了较好的应用,运行情况表明,通过三维全景实时监控界面,用户可以方便地查看整个电池箱更换过程、电池箱充电状态、电池架上有无电池箱、汽车运动状态等等,三维监控画面如图6所示,而且当现场设备出现异常时环境监控可以进行实时联动,并通过三维画面实时展示联动情况。三维实时监控极大地弥补了二维符号监控的不足,同时给人以身临其境的自然感受。

图6 换电站三维全景实时监控图
4 结论
电动汽车电池更换机器人三维实时监控不仅为用户提供了更加直观的监控画面,而且为用户提供了电池更换机器人离线示教等高级服务,使电池更换机器人能够更加高效安全运行;对本设计进行一定的扩展,可以应用到充换电设施领域其他设备的监控中,更好地服务于电动汽车充换电设施的建设,进一步促进电动汽车的快速、健康发展。
[1] 黄李, 张维戈, 姜久春. 2008年奥运会电动汽车充电站规划及运营模式方案[J]. 现代交通技术, 2007(4).
[2] Balkan T. Proweld: An off-line welding robot programming package with an interactive graphical interface[J].International Journal of Material and Product Technology,1997, 12(S4-6): 364-372.
[3] Shreiner D. 徐波, 译. OpenGL编程指南[M]. 北京: 机械工业出版社, 2008.
[4] 顾兵. XML实用技术教程[M]. 清华大学出版社, 2007.
[5] 戴文进, 刘静. 机器人离线编程系统[J]. 科技前沿与学术评论, 2003.4.
[6] 蔡志明, 卢传富, 李立夏, 等. 精通Qt4编程[M]. 电子工业出版社, 2008.
猜你喜欢
防爆电机(2021年4期)2021-07-28
汽车维修与保养(2021年8期)2021-02-16
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
铁道通信信号(2020年6期)2020-09-21
铁道通信信号(2019年3期)2019-04-25
动漫星空(兴趣百科)(2019年3期)2019-03-07
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
中成药(2018年2期)2018-05-09
海外星云(2016年17期)2016-12-01
