
基于Labview的模糊PID温度控制系统
2011-07-05 08:43聂乐乐李丽娟王劲松徐波秦国爱
长春理工大学学报(自然科学版) 2011年4期
聂乐乐,李丽娟,王劲松,徐波,秦国爱
(长春理工大学 光电工程学院,长春 130022)
温度控制在工程、生产和生活中应用广泛,在控制中经常会遇到时变性强、滞后大、线性度差的受控对象[1]。传统的温度控制需要掌握受控对象的数学模型,很难确定PID的三个参数。本系统采用模糊PID控制,由于模糊PID不需要控制对象的数学模型而是通过实时测量的温度值与设置温度的差值作为控制量的大小,使不同的控制对象都能得到最佳的PID调整。采用PID控制克服了传统温度控制的缺点,又具有了精度高,实时性强、可靠性好的特点。上位机用Labview软件设计的控制和显示程序使得系统控制灵活、方便观察。
1 系统结构图
系统硬件电路主要由Atmega16的最小系统、AD590的温度采集电路、继电器的控制电路、串口传输电路构成。温度传感器选用线性度高的AD590温度传感器,灵敏度为1μA/℃。AD590随温度变化输出的电流值通过信号处理电路转化为电压值,输入到Atmega16的AD输入口经A/D模块转化为数字量,通过串口传输给上位机,上位机的模糊PID程序输出控制量控制Atmega16输出PWM波,PWM波控制加热装置,保证环境的温度。系统结构如图1所示。
2 模糊PID原理
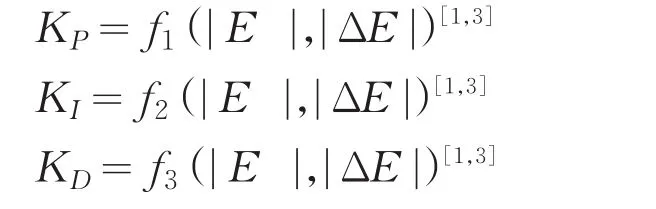
PID因结构简单、稳定性高、适应能力强、鲁棒性好、调整方便等优点在工程的控制中得到广泛的应用。模糊PID以温度变化E和温度变化率ΔE作为控制输入量,以PID输出量得到其修正值ΔKP,ΔKI,ΔKD[2],并实时调整PID的参数值具体关系式如下所示:
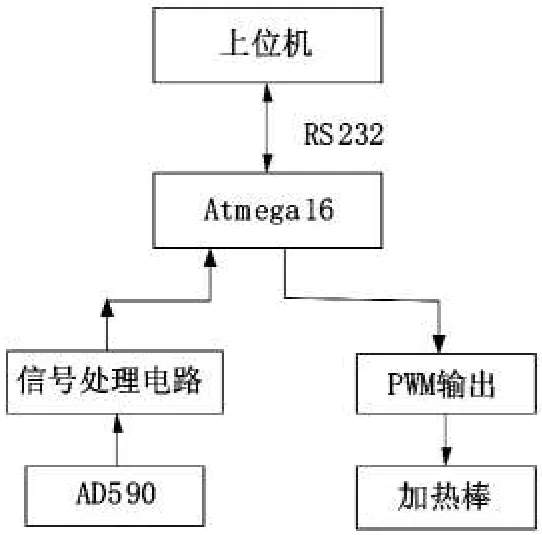
图1 系统结构图Fig.1 System structure
采用模糊PID控制可以获得良好的实时特性,使得系统的温度控制灵活、响应度高。由于引入积分区别于普通的PI控制,可以消除静态误差。设计的原理如图2所示。

图2 模糊PID原理Fig.2 Principle of fuzzy PID
KP、KI、KD分别是比例参数、积分参数、微分参数[4],这三个参数的设定规则
1.当E的绝对值取值较大的时候,为防止较大超调的系统响应,KI=0,KP、KD的取值应该尽量大。
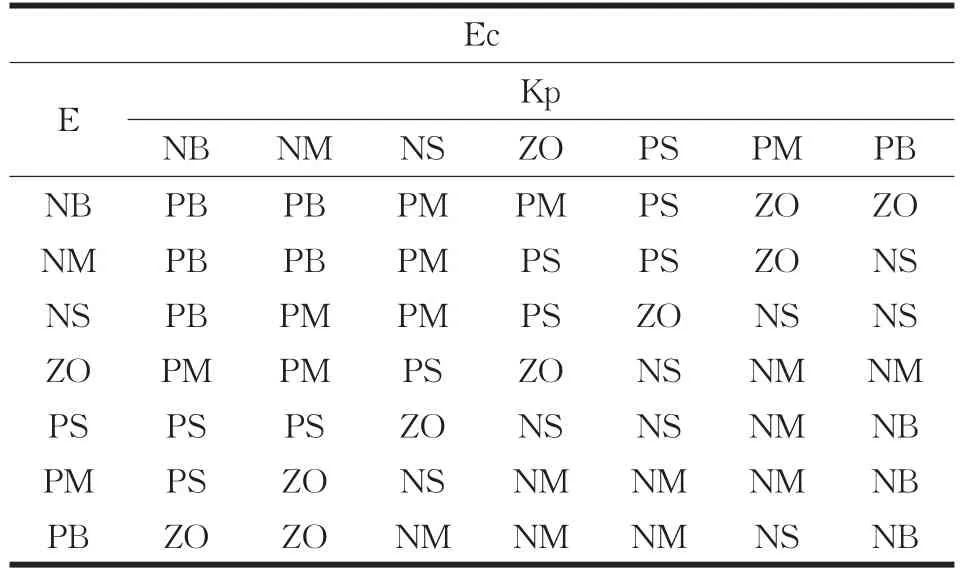
表1 模糊控制规则表Tab.1 Fuzzy control rule table
2.当E的绝对值取值大小适中的时候,为使系统具有的响应超调比较小,KP的取值比较小;KD的取值影响系统的响应度。
3.当E的绝对值较小的时候,为使系统稳定,KP与KI取值大,而此种情况下KD的取值严重影响系统的振荡情况,所以取值很重要。
根据以上经验,模糊控制规则如表1所示。
温度控制系统将采集到的实时温度信号与上位机设置的温度值比较,获得系统的输入信号变量温度偏差E和Ec,将其定义为模糊集上的论域:E、Ec={-3,-2,-1,0,1,2,3}[5]。三个输出控制量的修正值ΔKP,ΔKI,ΔKD的模糊集合为{NB,NM,NS,ZO,PS,PM,PB}[6],集合中的各个元素分别代表负大、负中、负小、零、正小、正中、正大[7]。 ΔKP论域为{-3,-2,-1,0,1,2,3},ΔKI论域{-0.3,-0.2,-0.1,0,0.1,0.2,0.3},ΔKD论域为{-3,-2,-1,0,1,2,3}。其隶属函数曲线如图3所示。
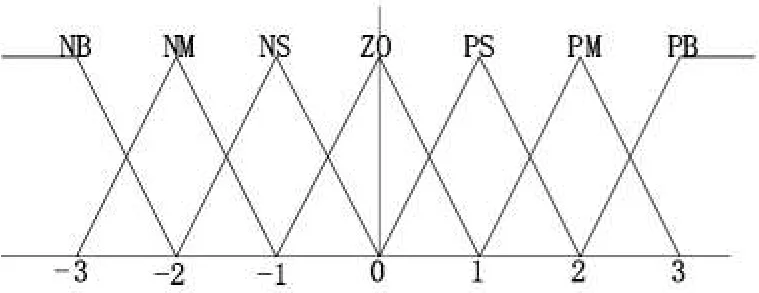
图3 隶属函数曲线模型Fig.3 Curve model of menbership function
3 软件程序设计
3.1 上位机程序设计
LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一种程序开发环境,由美国国家仪器(NI)公司开发的,LabVIEW与其他计算机语言的显著区别是使用的图形化编辑语言G编写程序,产生的程序是框图的形式。采用Labview设计可充分发挥计算机的能力,有强大的数据处理功能[6]。虚拟仪器价格低,而且其基于软件的体系结构还大大节省了开发和维护费用。
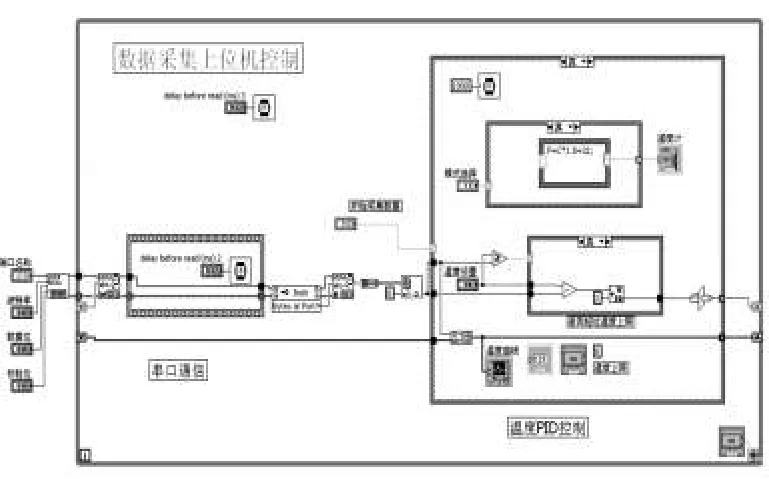
图4 程序图Fig.4 Program graph
本设计采用Labview编写上位机串口传输程序和温度的模糊PID控制程序。串口传输的当前温度值与设置温度值比较确定PID控制的参数KP、KI、KD,通过串口在传输到下位机用来控制PWM波得输出。程序图如图4所示。
温度的显示用Labview的波形和温度计显示控件,这样可以直观的显示当前温度值和温度的变化曲线,使得系统控制灵活,直观性强。经过多次的系统调试,其调试结果如图5所示。
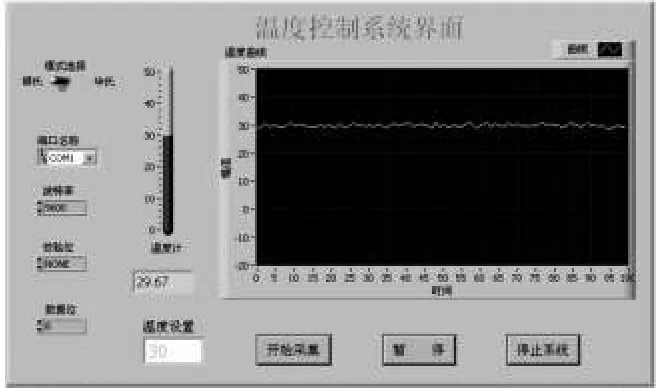
图5 上位机界面图Fig.5 PC interfac
从图中可以看出系统的调试结果,当设置温度为30的时候测得环境的温度变化曲线平滑,环境温度控制精度高。由此可见本系统既具有控制灵活、适应性比较强的优点,又保证了精度。
3.2 下位机程序设计
软件设计是在ICCAVR的编译环境下,编写的C语言程序,实现温度的采集,并通过AVR单片机的ADC模块,实现模数转换。Atmega16对接收到的二制数与上位机发送的控制变量通过模糊PID控制PWM得输出,输出的PWM波通过继电器来控制加热棒的工作。程序流程图如图6所示。
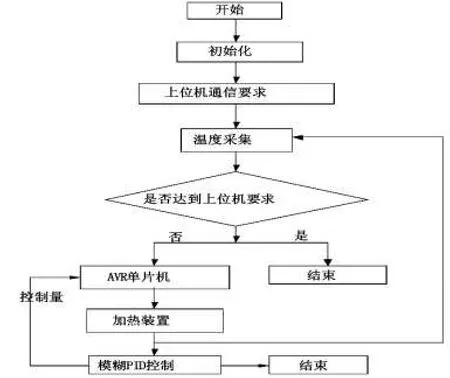
图6 程序流程图Fig.6 Process chart of program
4 实验结果
图7给出了当设定温度为30°C的时候,采用模糊PID控制得到的温度曲线。
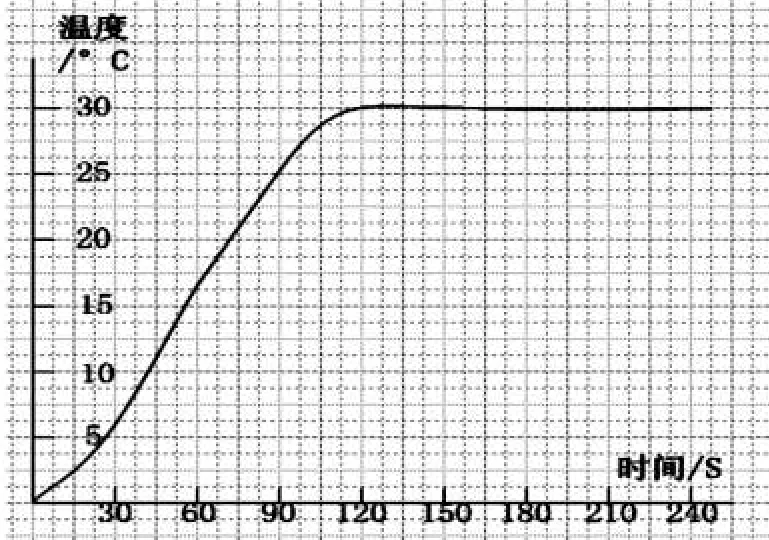
图7 仿真结果(T=30℃)Fig.7 Result of simulation(T=30℃)
从图中可以总结出,该系统具有很好的动态性能,时变性好,对纯滞后、非线性的一阶大惯性系统可以取得很好的效果。
5 结束语
本设计采用上位机模糊PID控制PWM波输出,实现温度的控制。在调试的过程中运行稳定。系统采用单片机实现温度控制结构简单、成本低廉、精度高、应用广泛。并且采用模糊PID提高了系统的实时性和准确性。
[1]王吉龙.基于模糊PID的温度控制系统[J].电子工程师,2008,54(5):77-79.
[2]陶永华.新型PID控制及其应用[M].工业仪表与自动化装置,1998,1:72-75.
[3]李涛,王圆妹.基于PWM的模糊PID温度控制系统研究[J].自动化技术与应用,2008,27(10):32-34.
[4]PASSION KM,YURKOVICH S.Fuzzy control[M].北京:清华大学出版社,2001:374-378.
[5]张浩宇,姜涛.基于模糊PID控制的摩擦负载系统的研究[J].长春理工大学学报:自然科学版,2011:34(2):67-70.
[6]周黎英,赵国树.模糊PID控制算法在恒速升温系统中的应用[J].仪器仪表学报.2008.29(2)33-35.
[7]LIU D X.PID control and program realizeing method[J].Chinese Joumal of Neijiang Teacher’s Colleage,2005,20(6):20-23.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
成都信息工程大学学报(2021年6期)2021-02-12
测控技术(2018年10期)2018-11-25
车迷(2018年12期)2018-07-26
制造技术与机床(2017年3期)2017-06-23
中国老区建设(2016年3期)2017-01-15
山东工业技术(2016年15期)2016-12-01
广东石油化工学院学报(2016年3期)2016-05-17
电子制作(2016年21期)2016-05-17
学习月刊(2015年3期)2015-07-09

- 长春理工大学学报(自然科学版)的其它文章
- 溶胶-凝胶法制备β-锂霞石纳米粉体
- 改进型卡塞格林光学系统的设计