
太阳同步卫星的控制现状及发展趋势
2011-06-30 03:01隋起胜袁建平
时间频率学报 2011年2期
隋起胜,袁建平
太阳同步卫星的控制现状及发展趋势
隋起胜,袁建平
(西北工业大学 航天学院,西安 710072)
在介绍太阳同步轨道相关知识的基础上,着重分析了该轨道的高度因素,给出了当前在轨太阳同步卫星轨道高度的上下限,介绍了几种典型的低轨道太阳同步卫星,同时给出了太阳同步卫星轨道控制方法的发展状况及趋势,最后综述了当前国内外太阳同步轨道的轨控模式与维持策略。
太阳同步轨道;轨道高度;自主轨控;轨控策略
太阳同步轨道SS-O(sun-synchronous orbit)是指由于地球是个扁椭球体,导致卫星轨道平面的进动,如果选定合适的倾角(大于90°)和轨道高度使得卫星轨道平面绕地球自转轴的旋转方向和角速度与地球绕太阳公转的方向和平均角速度相同(0.9856°/d),则这种轨道称为太阳同步轨道[1]。历史上典型的卫星包括NLMBUS,TIROS,COBE,SME,LANDSAT等均采用太阳同步轨道,最近一些采用太阳同步轨道的科学试验卫星包括Terra,Eo-1,GOCE等[1],至于将来的一些卫星包括Aura,CloudSat,CALISOd,GEC[2]等也将采用太阳同步轨道。这样高频率地使用太阳同步轨道的主要原因是其能很好地满足任务需求,其轨道的主要优点可归纳如下:
1)太阳同步轨道的轨道倾角很大(96.5°~102.5°),其轨迹几乎能覆盖所有纬度范围(极地附近某些区域除外);
2)太阳同步轨道的高度变化范围比较广(200~1 680 km),因此可以适用不同卫星、不同任务的需求,轨道适用范围比较大,便于对星载设备尤其是成像设备的选择;
3)由于轨道面法线方向和太阳方向的夹角几乎保持不变,因此其光照条件几乎是固定的,便于对卫星的热控系统和供电系统进行设计[1];
4)太阳同步轨道是回归轨道(或准回归轨道),即在一个固定的周期内,卫星的星下点轨迹会重复经过该地区,而且卫星每次都在同一地方时经过该地上空,因此可以更好地获得相关数据。
1 太阳同步轨道的高度因素
太阳同步卫星轨道高度的确定是进行卫星轨道设计的一个重要步骤,因为卫星轨道高度涉及轨道周期、覆盖范围、轨道回归周期、卫星对地观测设备的设计等相关问题。升交点变化率计算公式如下式所示[3]:
式(1)中为卫星的长半轴,为偏心率,为轨道倾角,为地球半径,为卫星的平均角速度,取0.001082。从上面的关系式可以看出轨道高度(或长半轴)与轨道倾角是相互耦合的,选择合适的长半轴和轨道倾角,使得0.985 6°/d,则该轨道为太阳同步轨道。图1为在轨道偏心率为0的情况下,符合太阳同步卫星轨道条件的轨道倾角和轨道高度之间的关系图。
根据J.R.Wertz的定义[1],轨道高度低于1 000 km的卫星为低轨卫星。当轨道高度超过1 000 km后,Van Allen辐射带将会给卫星带来大量辐射,从而增加卫星的设计成本和设计难度。考虑到地面覆盖、对地面目标的访问和目前国际上已发射的太阳同步卫星的飞行高度,本文将1 680 km作为SSO轨道的高度上限。卫星轨道高度的下限也是一个要考虑的问题,因为卫星在200~500 km的轨道高度,受到大气的影响很大,大气阻力会持续消耗卫星的机械能,导致轨道高度的降低。因此卫星必须通过轨道机动来提高轨道高度。图2为截止2007年8月所有在轨太阳同步卫星的轨道高度与卫星数量的统计图[4],由图2可以看出,目前在轨的太阳同步卫星其轨道高度主要集中在600~900 km之间。
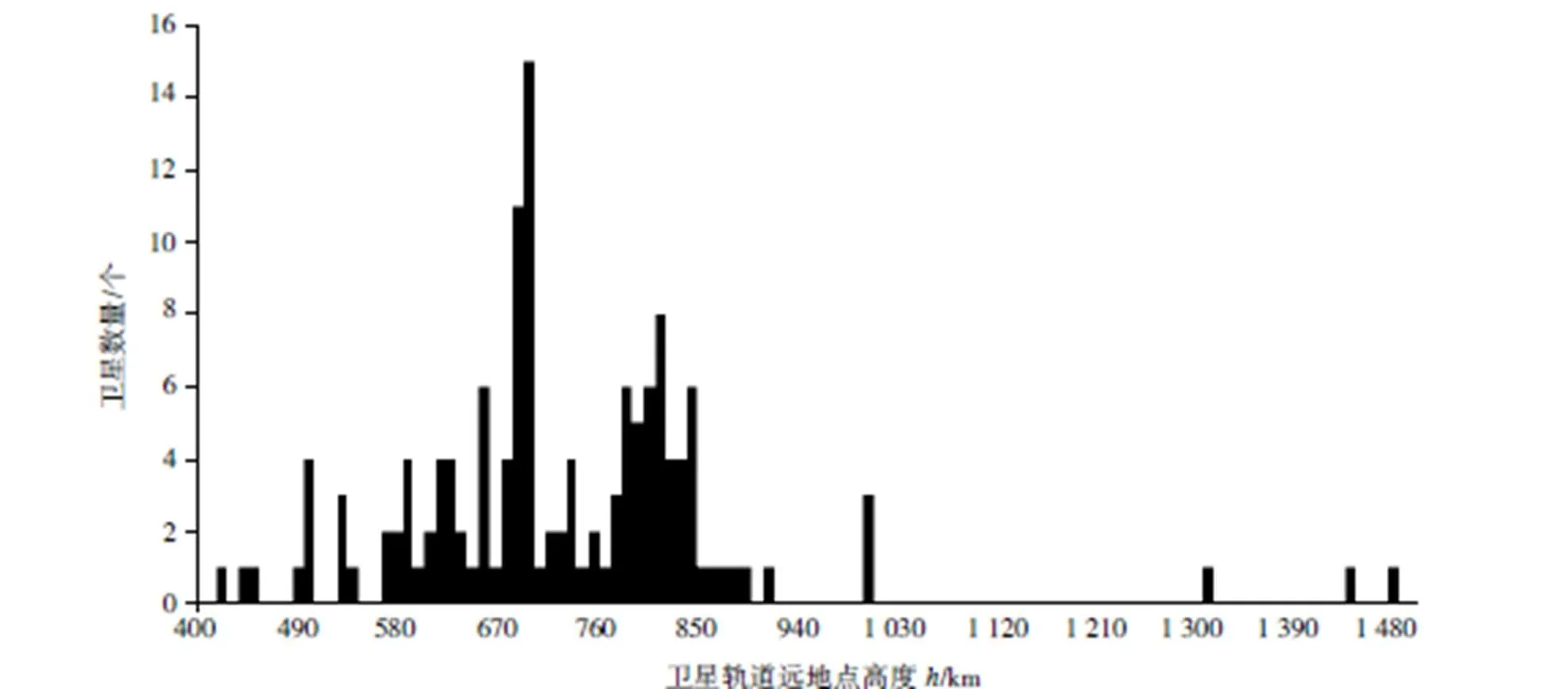
图2 太阳同步卫星轨道高度与数量的统计图
2 典型的近地太阳同步卫星
对于在超低轨道高度(一般低于300 km)运行的卫星,即使未搭载高倍率摄影机,也能很好地获得地表或气象信息,因此可望大幅削减成本。根据日本宇宙航空研究开发机构(JAXA)的分析,开发超低高度卫星的成本可望大幅削减至传统卫星的三分之一到五分之一[5],因此对其研究具有重要实用价值。
下面介绍几颗典型的近地太阳同步轨道卫星。首先介绍欧空局的地球重力场和海洋环流探测卫星GOCE(gravity field and steady-state ocean circulation explorer)[6]。GOCE是2009年2月发射的低轨道太阳同步卫星,其稳定工作后的轨道高度为240 km,轨道倾角为96.5°,设计寿命为2年,主要使命是测量地球引力场,帮助海洋学家绘制世界海洋环流图[6-7]。GOCE是欧空局首颗采用无阻力控制的卫星,即卫星围绕地球做“纯自由下落运动”,也是第1颗采用电离子推进器持续抵偿大气阻力的卫星[8-9]。图3是GOCE在太空运行的想象图。

图3 GOCE在太空运行的想象图
2007年日本宇宙航空研究开发机构(JAXA)宣布计划发射轨道高度为180 km的地球观测卫星[5],这种卫星因为轨道高度极低而在观测上具有极大的优势,但同样也面临外层大气阻力导致卫星进入大气层而烧毁的困境,因此该卫星将使用日本宇宙航空研究开发机构独立研发的高性能离子引擎,这种高性能离子引擎可以使卫星在这样的轨道运行3年。其中离子引擎是JAXA独自开发的技术,其相关性能已从小行星探测器“隼鸟号”任务中获得了实际验证。
下面再简单介绍一些国外轨道高度为400 km左右的太阳同步卫星[10]。如欧空局的STEP(satellite test of the equivalence principle)卫星,其轨道高度为400 km;美国的OrbView-3,其轨道高度为470 km,倾角为97°;美国的Quickbird-2卫星,其轨道高度为450 km,倾角为98°;以色列的EROS A1A2,轨道高度为480km,轨道倾角为97.33°。它们都是采用常规的火箭喷气发动机进行轨道控制与维持的,在此不赘述。图4、图5和图6分别是OrbView-3,Quickbird-2和EROS A1的卫星图片[10]。

图4 OrbView-3卫星

图5 Quickbird-2卫星

图6 EROS A1卫星
3 太阳同步卫星的轨道控制模式
太阳同步卫星一般为对地观测卫星,为便于卫星图像资料的处理和应用,对星载遥感仪器对地观测的阳光条件、对地覆盖的衔接以及通过同地区的高度都提出了较高的要求,因此对太阳同步卫星轨道要素(尤其是倾角、半长轴和偏心率)的要求极高。为了使卫星在预定的轨道稳定飞行,就需要对其进行轨道控制,轨道控制包括初始轨道捕获和轨道维持。航天器的轨道控制可以用以下2种方法来实现:非自主轨道控制(遥控指令控制)和自主轨道控制。
3.1 非自主轨道控制
非自主轨道控制是指根据地面测量信息,由地面计算好轨控发动机的点火时刻、点火时间长度(或点火提供的速度增量)和点火姿态,将轨道控制参数通过延时指令注入到飞行器,实现轨控发动机点火,其主要控制原理如图7所示[3]。该方案的优点是在实施轨道控制时,地面是已知的、可预测的;缺点是地面需要进行大量的计算,尤其是为轨道预报和控制指令的生成。随着在轨卫星的日益增多,完全由地面支持的非自主轨控模式给地面测控带来的压力越来越大。对于深空探测,非自主控制的命令传输还存在时延的问题。现在大部分在轨的太阳同步卫星都是采用上述方式实现的,不赘述。
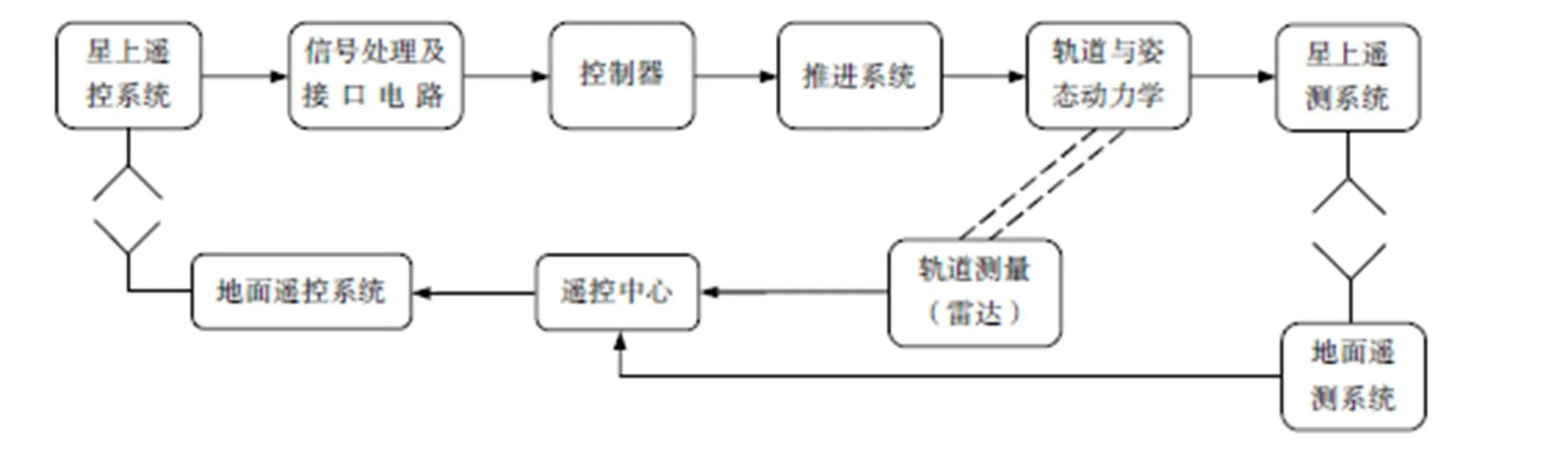
图7 非自主控制原理框图
3.2 自主轨道控制
飞行器自主控制是指飞行器根据轨道测量(主要靠星上GPS自主测量)信息、目标轨道信息(可由指令上注)和允许偏差,自主计算轨控发动机的点火时刻、点火时间长度(或速度增量)和点火姿态,实现轨控发动机点火以进行轨道控制。启动轨道控制指令可由地面发出,也可由飞行器自主发出。该方案的优点是轨道控制完全由飞行器自主完成,控制精度高,地面负担较小,不存在信号传输时延等,因此是以后轨控重点研究和发展的方向。缺点是飞行器本身需要进行大量的计算(尤其是在轨道预报和控制指令的生成方面),因此对星载计算机提出了较高的要求,再者飞行器自主控制对地面而言是未知的,因此增加了地面轨道预报难度;当飞行器轨道错误或发生宇宙空间单粒子事件时,具有一定的风险。
下面简单介绍国外一些典型的自主控制的卫星。首先是英国萨里大学的UoSAT-12。1999年UoSAT-12利用轨道控制软件包(orbicontrol kit,OCK)进行了首次全自主飞行试验,取得了圆满成功。2006年TacSat-2卫星利用升级版的OCK软件(OCK是由Microcosm公司研制的主要应用于卫星的自主轨道控制的软件)进行了自主轨控试验,卫星在切向的控制精度可以达到1km以内。UoSAT-12自主轨控所采用的OCK软件的输入、处理和输出如图8所示[11]。
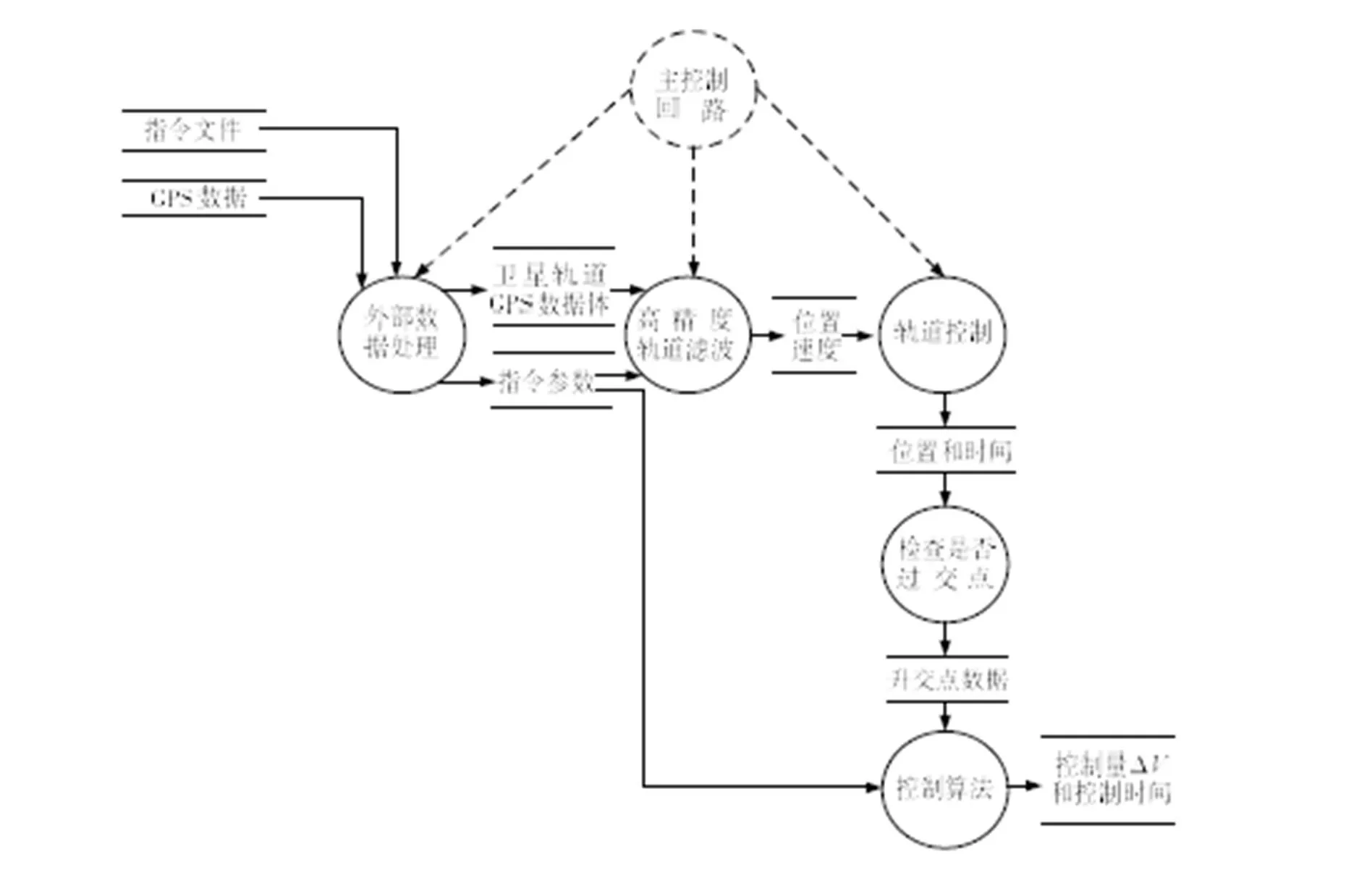
图8 OCK软件结构图
2004—2005年法国的太阳同步卫星EMETER进行了自主轨控试验,该试验旨在验证星载自主轨控计算和卫星轨道保持的能力。DEMETER采用TOPSTAR3000 GPS接收机,轨控计算软件装在GPS接收机上面,但是速度和姿态的控制指令软件是在有效载荷管理单元(payload management unit)产生的,其控制流程与OCK软件类似,在此不赘述。A. Lamy详细介绍了DEMETER进行自主轨道控制的相关问题[12],如DEMETER进行自主轨控的约束问题、星上自主轨控体系构成以及控制算法等。
GOCE是欧空局首颗采用无阻力控制的卫星。由于GOCE在极低轨道运行,该卫星的无阻力和高度控制子系统DFACS(drag-free and altitude control system)与静电重力梯度仪EGG(electricity gravity gradiometer)自动测定卫星的轨道高度、角运动、线性加速度和角加速等相关数据,从而得到GOCE所遭遇的阻力信息,然后电离子推进器根据阻力信息自动调整推力大小来抵偿大气阻力,以维持所需的高度和速度。
4 太阳同步卫星的轨道维持策略
首先介绍一下国外太阳同步轨道控制策略的一些研究状况。I. M. Ros和K. T. Alfriend提出了利用双脉冲实现对倾角、半长轴和偏心率这3个参数修正的方法[13],但是该方法较复杂,详情请见文献[13]。 V.Carrara在详细分析了BRSS(brazilian remote sensing satellite)卫星各种主要摄动对轨道根数影响的基础上,给出了BRSS的轨道控制与维持策略[14]。Y. J. Park给出了低轨道卫星轨道保持的一个节省燃料的优化算法[15]。S. De Florio等介绍了近地卫星进行自主轨控的优化问题[16],S. De Florio采用标准的Linear Quadratic Regulator(LQR)把整个问题当成是卫星编队来进行优化,当然其中一颗是虚拟的,然后利用PRISMA飞行软件验证了该算法的正确性。H.Bassner等详细介绍了GOCE任务中的等离子发动机的工作原理和工作性能[17]。E. Canuto等详细介绍了GOCE实现“drag-free”控制的数学模型,并给出了数值仿真结果[18-19]。R. Blott等介绍了SEP(solar electric propulsion)在GOCE和Bepi Colombo任务中的应用,其中在GOCE任务中介绍了SEP如何根据阻力信息提供高灵敏度的推力以抵偿大气阻力对卫星高度的影响[20]。P. Silvestrin和M. C. A. M. Van der LIST也对GOCE任务中采用电推进进行了相关研究[11, 21]。F. Ceccanti等对低轨道成像卫星采用电子推进进行了研究,并对低轨道太阳同步冻结轨道进行了仿真验证[22]。
国内在对太阳同步卫星控制方面也进行了相当多的研究,如杨维廉详细叙述了太阳同步轨道分析与设计所涉及的主要理论问题,给出了相应的在工程中十分有用的数学模型,并利用资源一号卫星入轨后所进行的飞行控制实践进行模型验证,具有很好的参考价值[23-26]。赵黎平等针对太阳同步轨道卫星的轨道捕获和保持中发动机所提供的周向力会同时改变轨道长半轴和偏心率这一问题,根据卫星的拉格朗日运动方程,提出了利用双脉冲同时实现长半轴和偏心率控制的策略[27]。杨永安等在分析太阳同步卫星降交点地方时漂移因素时,发现大气阻力和太阳引力摄动使得降交点地方时产生漂移加速度,杨等针对产生漂移的原因,提出了通过轨道偏置设计、轨道高度和轨道倾角保持控制的太阳同步卫星降交点地方时漂移控制策略[28]。罗宇阳等在考虑地球扁率摄动、大气阻力摄动和太阳引力谐振等主要因素后,采用了主动超调和被动控制相结合的策略,提出了一种初始半长轴偏置后的卫星地面轨迹保持方法,并分析了半长轴、倾角摄动变化率以及初始半长轴和倾角偏置量对地面轨迹漂移的影响[29]。姬学军提出用偏置半长轴补偿倾角误差引起的地面轨迹漂移的方法,该方法可适用于对地观测的太阳同步卫星普遍情况[30]。赵坚利用解析法对太阳同步回归轨道卫星动力学特性进行了研究,分析了非球摄动、大气阻力摄动和太阳引力谐振等主要摄动因素对太阳同步回归轨道的影响,并以此为依据对太阳同步回归轨道的轨道保持方法进行了相关研究[31]。
5 结语
太阳同步卫星由于其轨道特性能很好地满足相关任务需求,因此对其研究具有重要的理论意义与工程意义。从太阳同步卫星的控制现状及发展趋势看来,自主控制是太阳同步卫星未来轨道控制的主要趋势,值得加强研究。
[1] BOAIN R J. A-B-Cs of sun-synchronous orbit mission design[C]//14th AAS/AIAA Space Flight Mechainics Conference. Pasadena, California: Jet Propulsion Laboratory National Aeronautics and Space Administration, 2004.
[2] WERTZ J R. Coverage, responsiveness and accessibility for various"responsive orbit"[C]//3rd Responsive Space Conference. Los Angeles, California: [s.n.], 2005.
[3] 杨嘉墀. 航天器轨道动力学与控制(下)[M]. 北京: 宇航出版社, 2002: 6.
[4] SHORTT K, WEEDEN B. Development of a sun-synchronous zoning architecture to minimize conjunctions[C]//Secure World Foundation: Canadian Space Society, 2007.
[5] 网易新闻中心. 日本开发低成本超低空卫星拟三年后发射升空[EB/OL]. (2007-10-29)[2011-02-18]. http://news.163.com/07/1029/3RUKRIMT000120GU.html.
[6] 科技论坛. GOCE电离子推进器和重力梯度仪启动[EB/OL]. (2009-04-14)[2011-02-18]. http://www.tech-domain.com/viewthread.php?tid=18280
[7] ESA-ortal. ESA′s earth explorer gravity satellite on show[EB/OL]. (2007-07-24)[2011-02-18]. http://www.esa.int/esaCP/ SEM49CB474F_index_0.html
[8] ESA-observing the earth. ESA launches earth explorer mission GOCE[EB/OL]. (2009-03-19)[2011-02-18].http://www.esa.int/esaEO/SEMH3NIYRF_index_0.html
[9] ESA-the Living Planet Programme. GOCE achieves drag-free perfection[EB/OL]. (2009-05-16)[2011-02-18]. http://www.esa.int/esalp/SEMGUV00WUF_index_0.html
[10] Gulf of Mexico Programm. USGS science for a changing world[EB/OL]. (2009-03-19)[2011-02-18]. http://www.epa.gov/gmpo/gulfguard/2000_lbeytnr.html
[11] Vander LIST M C A M, Van PUT P A G, YÜCE V, et al. Next generation electrical proulision feed system and spin-off micro-prpulision components[C]//42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit. California: [s.n.], 2006, 8.
[12] LAMY A, CHARMEAU M C, LAURICHESSE D, et al. Experiment of autonomous orbit control on the demeter satellite[C]// Proceedings of the 18th Interntional Symposium on Space Flight Dynamics(ESA SP-548). Munich: [s.n.], 2004, 12: 327.
[13] ROS I M, ALFRIEND K T. Low_earth_orbit maintenance: reboosts vs thrust-drag cancellation[J]. Journal of Guidance, Control and Dynamics, 1994, 18(4): 930-932.
[14] CARRARA V. Orbit maintenance strategy for the brazilian remote sensing satellite[J]. Orbit Dynamics of Natural and Artificial Objects, 1989: 85-97.
[15] PARK Y J, PARK S Y, KIM Y R, et al. Fuel optimization for low earth orbit maintenance[J]. Journal of Astronomy and Space, 2008, 25(2): 167-180.
[16] FLORIO S D, AMICO S D. Optimal autonomous orbit control of remote sensing spacecraft[Z]. Germany: Space Flight Technology Department, German Aerospace Center(DLR), 2009.
[17] BASSNER H, KILLINGER R, MARX M, et al. Ion propulsion for drag compensation of GOCE[C]//36th AIAA/ASME/SAE/ ASEE Joint Propulsion Conferen and Exhibit. Huntsville, Alabama: [s.n.], 2000.
[18] CANUTO E, BONA B, CALAFIORE G, et al. Drag free control for the European satellite GOCE. PartⅡ: Digital control[C]// Proceedings of the 41st IEEE Conference on Decision and Control. Las Vegas, Nevada: [s.n.], 2002, 12: 1269-1274.
[19] CANUTO E, BONA B, CALAFIORE G, et al. Drag free control for the European satellite GOCE. PartⅠ: Modeling[C]// Proceedings of the 41st IEEE Conference on Decision and Control. Las Vegas, Nevada: [s.n.], 2002, 12: 4072-4077.
[20] BLOTT R, FEARN D, WALLACE N, et al. From low Earth orbit to Mercury with solar electric propulsion[C]//AIAA/ICAS International Air and Space Symposium and Exposition: the Next 100 Years. The World’s Forum for Aerospace Leadership: [s.n.], AIAA2003-2582.
[21] SILVESTRIN P. Control and navigation aspects of the new ESA Earth observation missions[J]. Annual Reviews in Control, 2005, 29(2): 247-260.
[22] CECCANTI F, MARCUCCIO S. Earth observation from elliptical orbits with very low altitude perigee[C]// Small Satellites for Earth Observation Digest of the 4rd International Symposium of the IAA. Berlin: [s.n.], 2003.
[23] 杨维廉. 太阳同步回归轨道的长期演变与控制[J]. 航天器工程, 2008, 17(2): 26-30.
[24] 杨维廉. 卫星轨道保持的一类控制模型[J]. 中国空间科学技术, 2001, 1: 11-22.
[25] 杨维廉. 太阳同步、回归轨道的轨迹漂移与控制[J]. 飞行器测控技术, 1993, 3: 6-12.
[26] 杨维廉. 资源一号卫星轨道: 理论与实践[J]. 北航天器工程, 2001, 10(1): 30-43.
[27] 赵黎平, 周风岐, 周军. 实现轨道偏心率协调控制的卫星轨道维持方法[J]. 西北工业大学学报, 2002, 20(1): 125-127.
[28] 杨永安, 冯祖人, 谭炜, 等. 太阳同步卫星降交点地方时漂移控制策略研究[J]. 控制与策略, 2008, 23(6): 693-696.
[29] 罗宇阳, 谢亚楠, 戎鹏志, 等. 倾角偏置太阳同步轨道的地面轨迹保持方法[J]. 上海航天, 2007, 2: 11-15.
[30] 姬学军. 太阳同步兼回归轨道的控制方法[J]. 宇航学报, 1982, 4: 1-12.
[31] 赵坚. 太阳同步(准)回归轨道卫星的轨道保持方法研究[J]. 中国空间科学技术, 2004, 24(4): 60-64.
Status and trend of control over sun-synchronous satellites
SUI Qi-sheng, YUAN Jian-ping
(Astronautics College, Northwestern Polytechnical University, Xi′an 710072, China)
On the basis of introducing the knowledge of the sun-synchronous orbit, the orbit altitude is analyzed emphatically, and the orbit height bound of the in-orbit satellites is given. Then several typical kinds of lower sun-synchronous satellites are introduced, and the status and development trend of the sun-synchronous orbit control are described. Finally an overview of the orbit control mode and maintenance strategy for sun-synchronous orbit are given.
sun-synchronous orbit; orbit height; autonomous on-board orbit control; orbit control strategy
V448.2
A
1674-0637(2011)02-0146-08
2011-03-06
隋起胜,男,博士研究生,研究员,主要从事航天测控总体方面的研究。
猜你喜欢
科学大众(2021年19期)2021-10-14
中国临床医学影像杂志(2021年6期)2021-08-14
北京汽车(2021年3期)2021-07-17
空间科学学报(2020年6期)2020-07-21
空间科学学报(2020年6期)2020-01-08
环球时报(2019-12-05)2019-12-05
新高考·高一物理(2017年3期)2017-07-14
新高考·高一物理(2016年3期)2016-05-18
太空探索(2014年4期)2014-07-19
河南科技(2014年23期)2014-02-27
