
多模卫星导航系统的RAIM算法研究
2011-06-30 03:01许龙霞张慧君李孝辉
时间频率学报 2011年2期
许龙霞,张慧君,李孝辉
多模卫星导航系统的RAIM算法研究
许龙霞1,2,3,张慧君1,2,3,李孝辉1,2
(1. 中国科学院国家授时中心,西安 710600;2. 中国科学院精密导航定位与定时技术重点实验室,西安 710600;3. 中国科学院研究生院,北京 100039)
研究了多模卫星导航系统的RAIM(接收机完好性自主检测)算法,根据多模卫星导航系统的定位模型,基于最小二乘法的原理计算伪距残差,构造奇偶矢量进行故障检测和故障排除。在只有一个观测量出现粗差的前提下,仿真了GPS与多模GPS/GLONASS/Galileo系统下的卫星可见数和DOP(精度因子),对比了衡量RAIM算法可用性的水平保护门限值(HPL)及这2种系统下的故障检测率与故障排除率。仿真结果表明:与GPS相比,多模导航系统具有更多的可见星,RAIM算法的可用性更高,并且其故障检测和故障排除的性能更好。因此,多模卫星导航系统不仅能为用户提供更高的定位精度,还能为用户提供更好的完好性保障。
接收机完好性自主检测;多模卫星导航系统;故障检测;故障排除
多模导航技术是指把2种或2种以上的同类型导航系统以适当的方式组合在一起,利用其性能上的互补特性,获得比单独使用任一系统时更高的导航性能。随着Galileo系统和北斗导航系统的发展,多模卫星导航是未来主要的导航方式。多模导航系统不仅能为用户提供更高的定位准确度,还能提供更多的冗余观测量。
导航系统的完好性定义为“导航系统不可用时及时向用户发出告警的能力”,要求导航系统必须在故障影响系统定位之前检测出故障[1]。接收机完好性自主检测(receiver autonomous integrity monitoring, RAIM)是完好性检测手段之一,它只利用来自接收机的可用信息,如冗余伪距观测量和接收机钟差数据就能实现完好性自主检测,是目前最简单最行之有效的完好性检测技术[2]。
接收机自主完好性检测可用于任何具有冗余观测量的导航系统中,如INS(inertial navigation system),GPS(global positioning system),GLONASS(global navigation satellite system)及即将建成的Galileo定位系统。多模导航系统[3]比单一导航系统具有更多的可见星和冗余观测量,另外,一些厂商已研制出多模导航接收机,这样用户就可以使用接收机完好性自主检测技术为多模导航系统提供完好性保证。本文以此为研究背景,首先分析多模导航系统的定位模型,在此基础上利用求得的伪距残差构造奇偶矢量研究了多模导航系统的故障检测和故障排除算法。第3节仿真了GPS与GPS/GLONASS/Galileo系统下的可见星个数,RAIM的水平保护门限值及RAIM算法的故障检测和故障排除率。
1 多模导航系统的定位模型
各卫星导航系统的系统时间均是独立产生的,由于误差的存在,各导航系统时间之间必然存在偏差,被称为系统时间偏差[4],简称系统时差,其值大约为几十纳秒。
对于GPS导航系统,只需解算4个未知参数,包括3维用户位置和1个接收机钟差。对于多模导航系统而言,每多1个导航系统,其定位模型中就需要增加1个时差变量,来对应接收机时钟与该导航系统的时间偏差。
多模导航系统的定位模型为:

2 多模导航系统中的基于奇偶矢量的RAIM算法
由第1节不难看出多模GPS/GLONASS/Galileo系统利用式(1)给出的模型定位时,至少需要6颗可见星。RAIM算法是以系统的冗余观测量为基础检测故障的,因此故障检测至少需要7颗可见星,故障排除至少需要8颗可见星。
常用的RAIM算法是基于冗余一致性检验的“快照”算法[2],该算法只依靠当前时刻的冗余观测量就可完成故障检测,这种方法较其他方法更容易应用到导航系统,特别是应用到冗余观测量数较多的多模导航系统中。
2.1 构造奇偶矢量

从奇偶空间到观测空间的变换为



2.2 基于奇偶矢量的故障检测
作如下假设检验:

2.3 基于奇偶矢量的故障排除



利用基于奇偶矢量的RAIM算法进行多模导航系统的完好性检测时,对于GPS/GLONASS/Galileo系统,若要进行故障检测至少需要7颗可见星,故障排除至少需要8颗可见星。
3 GPS与GPS/GLONASS/Galileo的RAIM仿真比较
本节仿真对比GPS与多模GPS/GLONASS/Galileo系统下的RAIM的可用性,故障检测及故障排除的结果,为多模导航系统的完好性检测提供参考。
3.1 仿真数据
根据GPS,GLONASS和Galileo系统的轨道参数仿真得到1d内各导航系统卫星的位置[7],每10 s一组数据点。用户位置选在临潼,仰角为15°。在此条件下仿真得到的可见星个数如图1所示,精度因子(dilution of precision,DOP)值如图2所示。由图1和图2可见,多模GPS/GLONASS/Galileo系统的可见星个数明显多于GPS下的可见星个数,DOP值也优于GPS,因此利用多模卫星导航系统进行定位时能获得比单一GPS导航系统更高的定位准确度。

图1 1 d内GPS与多模GPS/GLONASS/Galileo系统的可见星个数

图2 1 d内GPS与多模GPS/GLONASS/Galileo系统的DOP值比较
3.2 GPS与多模GPS/GLONASS/Galileo下RAIM算法的可用性比较
RAIM算法的可用性用水平保护门限值(horizontal protection level,HPL)衡量[8],其定义为水平面内以用户真实位置为圆心的圆的半径。




相同条件下,仿真得到的多模GPS/GLONASS/Galileo系统与GPS的水平保护门限值如图3所示,可见多模GPS/GLONASS/Galileo系统的HPL值比GPS的HPL值小得多。这是因为多模系统具有更多的可见星,因此卫星的几何分布较好,而HPL值恰是衡量可见星几何分布的参数,故有图3所示的结果。
将实际计算得到的HPL值与给定飞行阶段要求的HAL值比较,就可以判断RAIM算法的可用性。从图3的结果可以看出,2导航系统下的HPL值均小于HAL的值,多模导航系统下的HPL值比GPS的HPL值小很多并且变化平稳,值在50 m以内,能满足要求更高的飞行阶段的要求。
3.3 GPS与多模GPS/GLONASS/Galileo系统下RAIM算法的比较
卫星故障的出现是由不同类型的误差引起的,多径误差、干扰、人为干扰、电离层效应等引起的误差属于局部误差[9-10],伪距观测量中出现的长期偏移量就是由局部误差引起的。长期偏移量的模拟方法是在指定的历元对某颗可见星加一个阶梯函数,表示在此颗星上持续出现的故障。
给某颗可见星加上从10m到100m,步长变化为5m的偏移量。仿真得到1d内GPS和多模GPS/GLONASS/Galileo系统的故障检测及故障排除结果分别如图4和图5所示。由图4和图5可以看出所加伪距偏移量小于40m时,GPS的故障检测率和故障排除率与多模系统相当,这说明多模系统检测小偏移量的能力没有明显的提高。随着伪距偏移量的增大,多模系统的故障检测和故障排除的概率迅速增大,偏移量大于65m后故障检测率和故障排除率均达到100%,而GPS的故障检测率和故障排除率收敛较慢,偏移量100 m时还不能达到100%的概率。
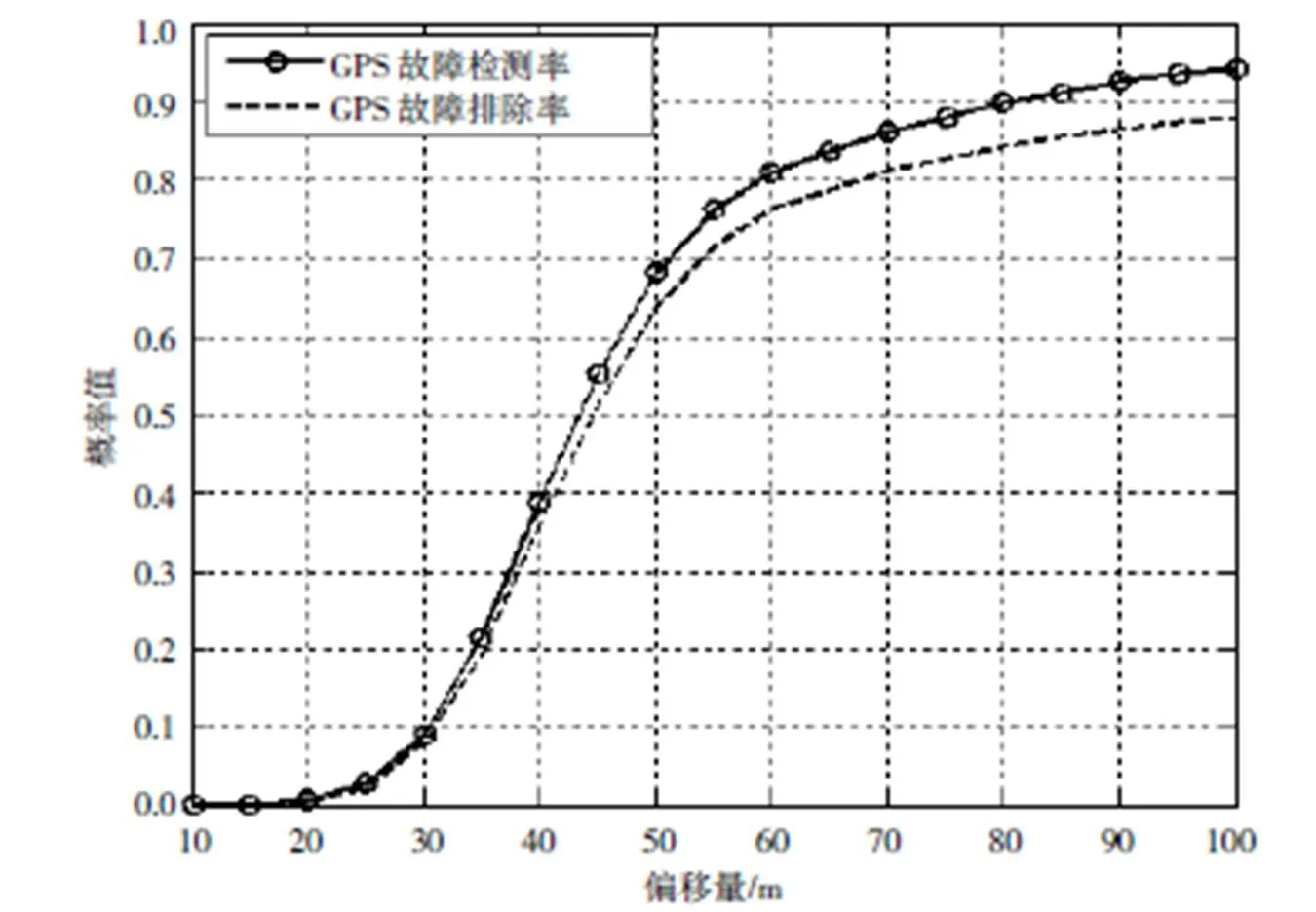
图4 GPS的故障检测及故障排除概率

图5 多模GPS/GLONASS/Galileo系统的故障检测率及故障排除率
GPS与多模GPS/GLONASS/Galileo系统下的故障检测率与故障排除率之差示于图6。由图6所示的结果可以看出与多模导航系统相比,GPS的故障排除率与故障检测率的差值较大。仰角15°情况下,GPS的故障检测率与故障排除率的差值随着伪距偏移量的增大逐渐增大。在多模GPS/GLONASS/Galileo系统中,故障排除率与故障检测率非常接近,这说明多模系统比GPS具有更高的故障排除能力,只要检测到故障就能成功排除故障。
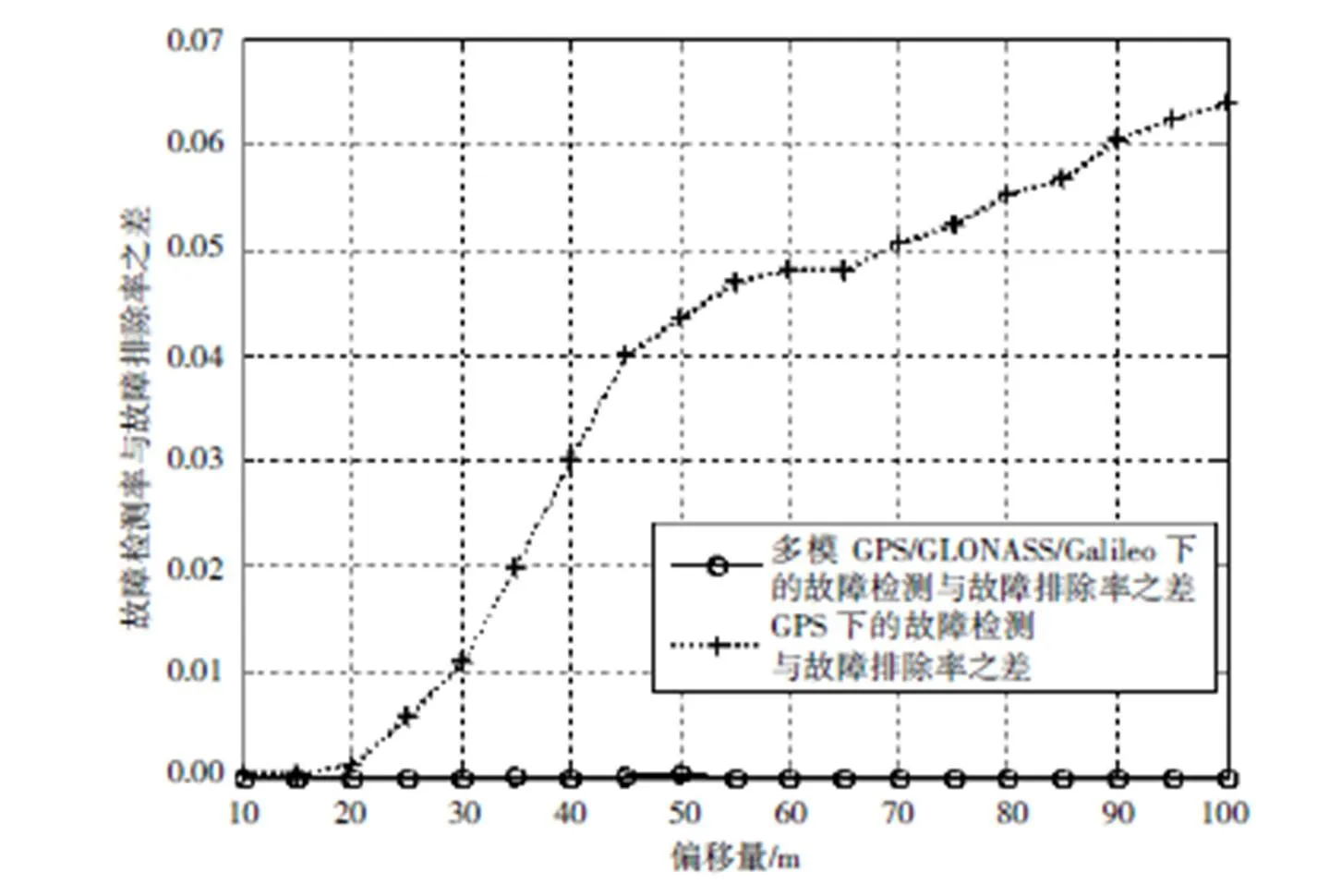
图6 GPS与多模GPS/GLONASS/Galileo系统下的故障检测率与故障排除率差值的比较
4 结论
本文采用奇偶矢量方法研究了多模导航系统的RAIM算法。分析对比了GPS与多模GPS/GLONASS/Galileo下的可见星个数、DOP值及RAIM算法的水平保护门限值,仿真分析知多模导航系统比GPS具有更多的可见星个数,DOP值也优于GPS,并且多模系统的HPL值优于GPS的相应值。通过对GPS与多模GPS/GLONASS/Galileo系统的RAIM算法仿真分析知多模系统的故障检测率和故障排除率均优于GPS。多模导航系统不仅能提高用户的定位准确度,还能改善系统的完好性自主检测性能,以满足对完好性性能要求更高的应用场合的需求。
[1] LEE Y, VAN DYKE K, DELLEENE B, et al. Summary of RTCA SC-159 GPS integrity working group activities[J]. Navigation, 1996, 43(3): 307-338.
[2] STURZA M A. Navigation system integrity monitoring using redundant measurements[J]. Navigation: Journal of the Institute of Navigation, 1988-89, 35(4): 69-87.
[3] KE Xi-zheng, XI Xiao-li, CHEN Jian, et al. Concerning information configuration of integrated navigation system[J]. Journal of Astronautics, 2004, 6(25): 632-636.
[4] MOUDRAK A, KONOVALTSEV A, FURTHNER J, et al. GPS Galileo time offset: how it affects positioning accuracy and how to cope with it[C]//Proceedings of ION GNSS 17th International Technical Meeting of the Satellite Division. Long Beach, California: [s.n.]. 2004: 660-669.
[5] 王鹏, 仇跃华. 最小二乘RAIM与定位组合算法研究[J]. 电子测量技术, 2008, 2(31): 20-23.
[6] 陈小平, 腾云龙. 接收机自主完好性监测算法研究[J]. 电子科技大学学报, 2008, 2(37): 218-220.
[7] 赵春梅, 欧吉坤, 文援兰. 基于Galielo及GPS-Galileo组合系统的仿真分析[J]. 系统仿真学报, 2005, 4(17): 1008-1011.
[8] 陈金平, 许其凤, 刘广军. GPS RAIM 水平定位误差保护限值算法分析[J]. 测绘学院学报, 2001, 增刊(18): 1-3.
[9] 王爱兵, 何海波, 郭睿, 等. GPS测时的接收机自主完好性监测算法[J]. 海洋测绘, 2007, 3(27): 28-30.
[10] 屈俐俐, 漆溢. 守时设备故障的自动诊断和报警系统设计[J]. 时间频率学报, 2009, 32(1): 50-55.
Study on RAIM algorithm of multi-mode navigation system
XU Long-xia1, 2, 3, ZHANG Hui-jun1, 2, 3, LI Xiao-hui1, 2
(1. National Time Service Center, Chinese Academy of Sciences, Xi′an 710600, China; 2. Key Laboratory of Precision Navigation and Timing Technology, National Time Service Center, Chinese Academy of Sciences, Xi′an 710600, China;3. Graduate University of Chinese Academy of Sciences, Beijing 100039, China)
The RAIM(receiver autonomous integrity monitoring) algorithm for multi-mode navigation system is analyzed in this paper. Based on the least squares solution of multi-mode navigation positioning model, the parity vector is developed for the fault detection and fault exclusion. For GPS navigation system and multi-mode GPS/GLONASS/Galileo navigation system, the number of satellites in view of user and the values of DOP(dilution of precision) are simulated on the assumption that there is only one fault in the observed quantities. The values of HPL(horizontal protection level) which are used to measure the availability of RAIM algorithm and the behaviors of fault detection and fault exclusion are compared between these two systems. Simulation results demonstrate that compared with GPS, there are more satellites in view, better availability of RAIM algorithm, and better performance of fault detection and fault exclusion for the multi-mode GPS/GLONASS/Galileo navigation system. Therefore, the multi-mode navigation system not only can provide higher positioning precision, but also can provide better integrity than GPS system.
RAIM(receiver autonomous integrity monitoring); multi-mode navigation system; fault detection; fault exclusion
TN967.1
A
1674-0637(2011)02-0131-08
2010-12-27
国家自然科学基金重点资助项目(11033004);国家自然科学基金资助项目(61001076)
许龙霞,女,博士研究生,主要从事接收机完好性自主检测及授时方法的研究。
猜你喜欢
地理空间信息(2022年3期)2022-04-01
中学生数理化·高一版(2021年1期)2021-03-19
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
中学生数理化(高中版.高二数学)(2020年9期)2020-10-27
中学生数理化·高一版(2019年9期)2019-10-12
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
制造技术与机床(2017年7期)2018-01-19
测绘工程(2017年3期)2017-12-22
中国惯性技术学报(2017年1期)2017-06-09
百科探秘·航空航天(2016年9期)2016-12-01
