
含三次谐波注入的SPWM在dsPIC30F单片机上的实现
2011-06-23 09:49张加胜
电气技术 2011年9期
于 洋 张加胜
(中国石油大学(华东)信息与控制工程学院,山东 东营 257061)
脉宽调制(PWM)技术被广泛地用于AC-DC、DC-DC 以及DC-AC变换器的开环或闭环控制中,利用正弦脉宽调制(SPWM)控制方法可使三相电压源型逆变器(VSI)输出幅值、频率和相位均可控的正弦电压。
有三种基本的PWM方法,即自然采样PWM、规则采样PWM以及直接PWM。不同的PWM方法有各自的特性及优缺点,包括实现的难易程度、谐波含量、最大调制比等。其中,规则采样PWM实质上是一个线性采样过程,数学公式推导比较简单,可以很方便地通过单片机或DSP利用软件方法来实现。当用规则采样法实现SPWM时,在线性控制区,其调制比的范围是0~1,且当调制比为1时,直流母线电压利用率仅为 86.6%;通过三次谐波注入,可以提高线性控制区的最大调制比,达到提高直流母线电压利用率的目的。
本文针对三相VSI,以dsPIC30F单片机为控制芯片,利用规则采样法,实现三次谐波注入 PWM(THI-PWM),并给出了相关实验结果,验证了所用方法的正确性。
1 三次谐波注入PWM

图1 三相电压源型逆变器的拓扑结构
三相电压源型逆变器的拓扑结构如图1所示。三相VSI的三相正弦参考信号,即调制信号的数学表达式依次为
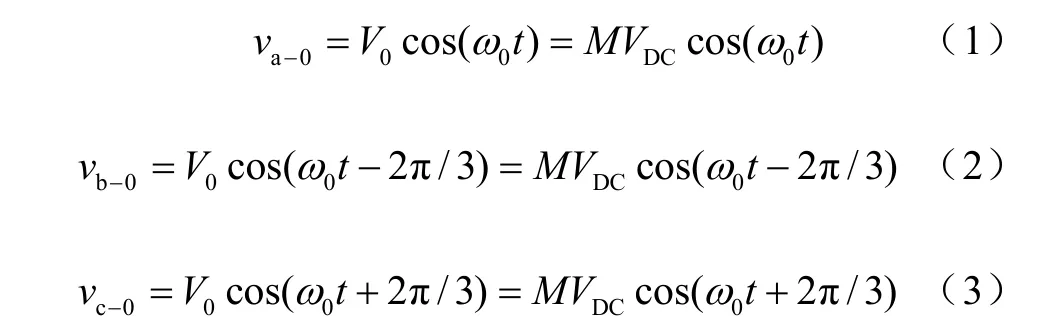
式中,VDC为直流母线电压的一半,V0为输出电压的幅值,M=V0/VDC为调制比,三相参考信号是相对于直流母线的中点0来定义的。
将相电压相减即可得到目标输出波形的基波线电压表达式

从以上基波线电压信号的表达式可以看出,当M=1时,基波线电压的最大幅值仅为,为直流侧电压值2VDC的倍,可以认为PWM的调制过程没有充分利用整个调制空间。如果继续增加调制比M以增加基波输出电压的幅值,将会导致过调制,为避免过调制,可以采用三次谐波注入的方法来增大输出电压值[1]。
三次谐波注入法示意图如图2所示,其基本思想是在三相VSI的每一相目标参考波形中注入一定比例的三次谐波成分,以减小相电压的峰值,达到增大调制比同时又不会产生过调制的目的;此外,由于三相 VSI的拓扑结构以及负载的星形连接方式,三次谐波在各相桥臂之间得以消除,使得其输出基波线电压中不含三次谐波,这也是该方法的优势之一[2]。
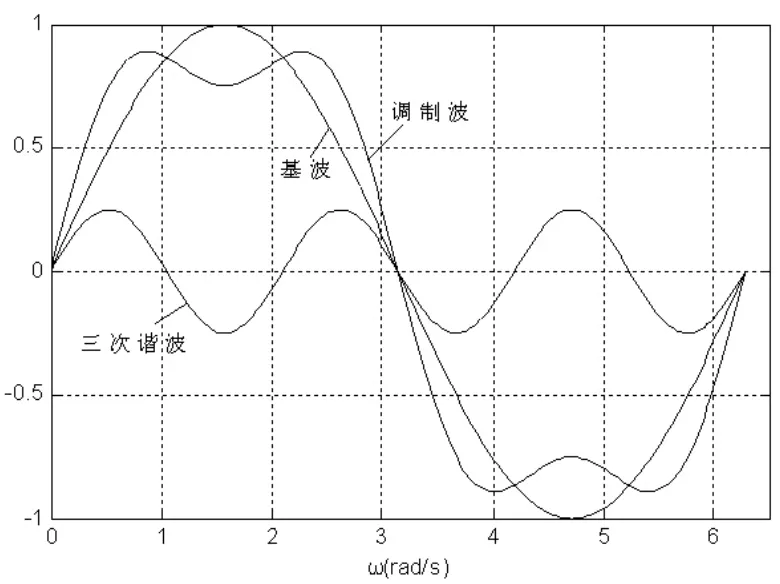
图2 三次谐波注入示意图
注入三次谐波后,三相参考电压波形的数学表达式依次为

其中 γ=M3/M是一个需要优化的参数,它反映了所注入的三次谐波的比例大小,要找到一个最合适的γ值,以获得最大的调制比同时还要保证不会产生过调制。根据文献[3],当γ=1/6,可以获得线性控制区的最大调制比1.15,即通过简单地注入幅值为基波参考电压幅值1/6的三次谐波,就可以使调制比增加15%;另有一些研究人员提出优化的三次谐波分量的幅值应为基波参考电压的25%,这样可以减少谐波畸变,其代价是线性最大调制比从1.15下降到1.12。
通过以上分析可以看出,三次谐波注入 PWM可使调制比增大到1.15同时不会引起过调制,从而提高了直流母线电压的利用率。
2 单片机实现
PWM 控制方法采用规则采样法,规则采样法又分为对称规则采样法和非对称规则采样法,与非对称规则采样PWM相比,对称规则采样PWM的一个固有缺点是它所产生的额外的边带谐波分量会出现在输出电压频谱中,因此非对称规则采样PWM要好一些[3]。本文采用非对称规则采样PWM。
单片机采用 Microchip公司的电机与电源系列数字信号控制器 dsPIC30F4011,该单片机具有专门的电机控制PWM(MCPWM)模块,PWM模块具有三个占空比寄存器,可以产生6路输出,每个输出引脚均可互补或独立工作;具有用于互补模式的硬件死区时间发生器;具有多种输出模式,包括单事件模式、边沿对齐模式、中心对齐模式等[4]。利用MCPWM模块,在PWM中断中改变三个占空比寄存器的值,可以很方便地产生所需的PWM波。
产生正弦波最简便的方法是使用查表法,当然也可以使用实时计算法,但实时计算花费时间比较多,因此在程序中建立一个查找表,查找表中共有1024个离散正弦值,包含完整的360°;数据格式采用16位有符号整型格式,其中0x7FFF表示+0.999而0x8000表示-1.0。每经过一个周期性的间隔从该表读出正弦值,将该值经过换算使之符合所允许的占空比范围,然后将它写入占空比寄存器。
程序中利用 16位指针变量来指示数据表的当前位置,该指针可表示完整的360°,其中 0x0000表示0°,0xFFFF表示359.9°;当要从数据表中取值时,正弦指针的高10位被用作索引值,低六位可被视作小数位,之所以选择用16位指针是因为这样可以产生很低的调制频率。程序中,以周期性的间隔来调节该指针,并且在每个间隔将固定的增量值加给该指针,则该指针将以固定的频率在表中前移。举例来说,采用异步调制,要获得 50Hz的调制频率,载波频率取 2.184kHz,则正弦表指针增量值Δ=50× 216/2184,即Δ=1500,也就是说如果每次PWM中断,将正弦指针加上1500,将会获得50Hz的调制频率。
要生成三相 PWM波,通过给指针变量加上固定的偏移值来提供相位偏移,对于 16位指针,0x5555提供120°的偏移,0xAAAA提供240°的偏移;每产生一次 PWM中断,将这两个偏移值加上当前指针变量值就可为其他两相提供正弦指针。此外,由于采用16位运算,因此若正弦指针加上偏移值后导致溢出,正弦指针将会自动返回起始位置[5]。
3 实验结果

图3 PWM波形
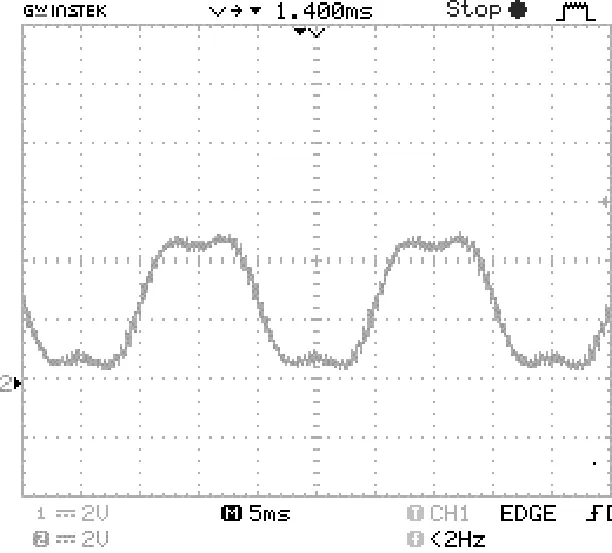
图4 PWM波经低通滤波后的波形
实验结果如图 3、图 4所示,采用非对称规则采样PWM法,异步调制,注入了三次谐波,载波频率为2.184kHz,调制波频率为50Hz。图3中(a)与(b)均为单片机输出的 PWM 波,频率约为2.184kHz,(b)图为局部放大后的结果,从中可以看出PWM波占空比变化的过程;图4为PWM波经RC低通滤波器滤波后的波形,其频率为50Hz,从中可以看出三次谐波注入的效果。
从以上实验结果可以看出,实现了THI-PWM,达到了预期目的。
4 结论
分析了三相电压源型逆变器采用普通规则采样法实现SPWM的局限性,即直流母线电压利用率比较低,通过简单地注入幅值为基波参考电压幅值1/6的三次谐波,就可使调制比增加15%。以dsPIC30F4011单片机为控制芯片,采用非对称规则采样法,通过软件编程,实现了三次谐波注入 PWM,从实验波形来看,所用方法是合理和正确的。
[1]Grant, D.A., Houldsworth, J.A. The Use of Harmonic Distortion to Increase the Output Voltage of a Three-phase PWM Inverter. Trans.IEEE, 1984, IA-20(5):1224-1228.
[2]D. C. Rus, N. S. Preda, et al. Comparative Analysis of PWM Techniques: Simulation and DSP Implementation.2010 IEEE International Conference on Automation Quality and Testing Robotics (AQTR), 2010(3):1-6.
[3]D.G.Holmes,T. A. Lipo. Pulse Width Modulation for Power Converters: Principles and Practice. New Jersey:Wiley-IEEE Press, 2003.
[4]Microchip. dsPIC30F4011/4012 Data Sheet. Microchip Technology Inc, 2008.
[5]何礼高.dsPIC30F电机与电源系列数字信号控制器原理与应用.北京:北京航空航天出版社,2007:539-552.
猜你喜欢
测控技术(2018年9期)2018-11-25
广东第二课堂·小学(2017年9期)2017-09-28
电测与仪表(2016年5期)2016-04-22
电测与仪表(2016年9期)2016-04-12
电测与仪表(2016年14期)2016-04-11
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年5期)2015-04-09
电测与仪表(2015年5期)2015-04-09
单片机与嵌入式系统应用(2014年9期)2014-03-11
电机与控制应用(2013年9期)2013-11-21
