
微波透镜成像技术在目标识别中的应用研究
2011-06-18 04:45张继龙赵国庆韩英臣
中国电子科学研究院学报 2011年6期
张继龙,赵国庆,韩英臣
(空军装备研究院防空所,北京 100085)
0 引言
对微波散射体的成像和识别一直是雷达领域的研究热点之一,特别在雷达领域,目标成像和识别难题一直没有得到根本解决。目前对微波散射体的成像技术取得重大进展,具有代表性的成果有合成孔径雷达(SAR)[1]和逆合成孔径雷达(ISAR)[2]。前者对静止目标成像获得了成功,后者对近距离运动目标的成像获得了成功。不过,对于远距离运动目标的成像和识别,ISAR提供的帮助并不大。从不同的角度提出了微波散射体成像的一种方法,该方法使识别不同散射体成为一种可能。
1 透镜成像的基本原理
目标成像可以理解为通过一定的装置或算法使目标的某一点的全向辐射(或漫反射等)在另一空间坐标处汇聚起来,目标所对应的不同的汇聚点就构成了该目标的像。微波透镜和光学透镜成像都是基于上述原理。透镜成像示意图,如图1所示。
在图1中,目标位于透镜一倍焦距外,其A点处的漫反射经过透镜后重新汇聚到一点A'处,不同点的漫反射经过透镜聚焦后在透镜的另一侧的不同位置汇聚,从而形成了该物体的实像。随着物距的调整,还可以获得该物体的放大或缩小的实像。
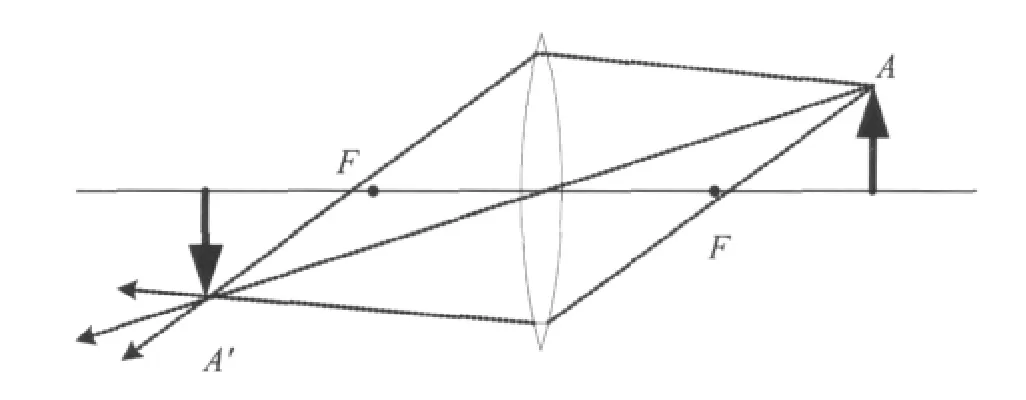
图1 透镜成像示意图
如果不放置透镜,而是在透镜所在位置直接放置一感光屏,那么感光屏所接收到的将是物体的不同点的漫反射的叠加,感光屏上每一点的接收场都包含了该目标所有点的信息,要区分目标上的不同散射点难度很大。但是,目前的大多数雷达恰恰就是采用的这种工作方式。
2 微波透镜成像实验
对透镜来说,目标还可以成虚像,但只有实像才是可以被感光元件或辐射敏感器件所直接接收的。下面对微波透镜的成像效果进行了实验,如图2所示。

图2 微波透镜成像实验
微波散射体为哑铃形金属体,其中球形金属体的直径为24 mm,微波透镜采用介质透镜的形式,其焦距约为150 mm,透镜口径为100 mm。目标位于透镜左侧2倍焦距处。微波辐射源频率为30 GHz,位于透镜与散射体中间,对准散射体进行辐射。根据透镜成像原理,该目标的像位于透镜右侧的2倍焦距处,采用电磁场数值计算工具可计算出该处的场分布情况,即可获得散射体的像。
在图2中透镜右侧给出了该散射体的像,为了便于详细观察,该像的正面图,如图3所示。
由于微波频段的绕射和衍射现象严重,所成立的像已经不够清晰。从图3的结果可以大概看出,该散射体为竖直放置的粗短物体(图中中心部分),但已经无法明显区分该散射体的两个强散射点(两个金属球)。
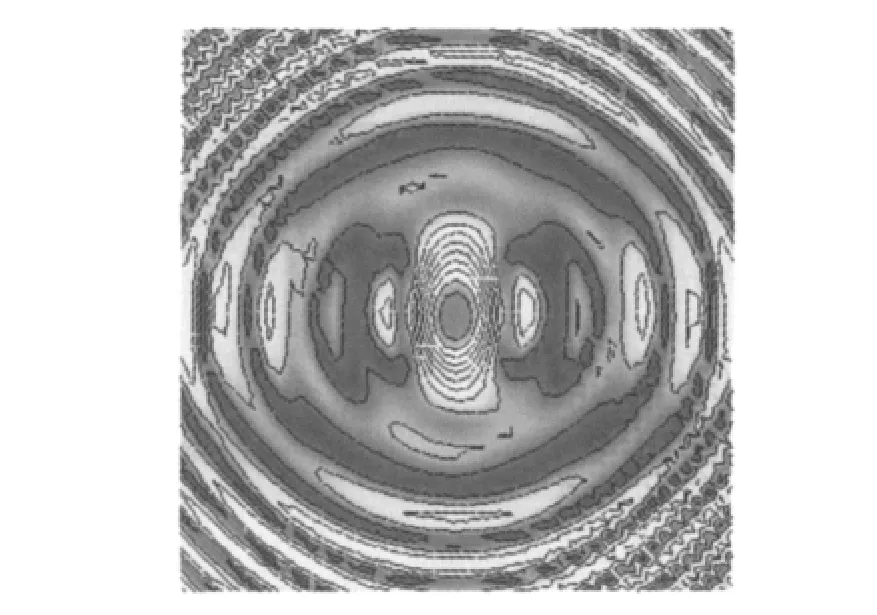
图3 散射体的像
透镜口径处的电场分布及哑铃形散射体的放置方向,如图4所示。在该图中可以看到,口径场的分布与散射体形状之间无明显的对应关系。直接利用口径场分析散射体的形状和进行目标识别,是一项难度很大的工作。

图4 透镜的口径场
3 虚拟透镜成像
为了避免微波频段电磁波绕射和衍射对成像的不良影响,可以采用虚拟透镜对散射体成像,即利用凸透镜光学成像规律,采用一定的算法,将透镜所在位置的口径场进行变换,在虚拟“透镜”另一侧的适当位置形成一定放大倍数的散射体实像。
透镜成像具有以下规律,设透镜的焦距为F,物距为U,像距为V,像的放大倍数为γ,则有如下基本关系式
进一步推导可得

上述公式中各参数的意义,如图5所示,其中参数d为入射点距离透镜中心的距离。这些公式揭示了透镜对入射波的折射规律。

图5 透镜成像规律
关于透镜的移相,根据其聚焦现象,认为透镜对一组平行于其主轴的入射波移相后,到达焦点时相位相等。从而可推得透镜的移相量

式中,R为透镜的口面半径。
透镜成像的主要机理有两个:一是折射,透镜的厚度不均匀,即使是一组平行的入射波其折射角也各不相同;二是移相,透镜的厚度不均匀,不同的厚度对入射波产生不同的移相量。
设透镜处的入射口径场为Ei,可得出像处的场强Er,计算公式为

式中,m、n为入射口径场、像场采样点序号;ψm表示透镜的相移量;ψmn表示入射点到像点的传播相移。
折射角与入射角相关,精确计算透镜的折射角难度很大,但是可以利用式(5)对口径场的传播方向和扩散角进行估算。成像公式还可改为

式中,若像点在估算的传播角度范围内ρ=1,否则ρ=0。
透镜对平行于主轴的入射平面波的成像结果,如图6所示,计算结果表明,聚焦情况良好,表明虚拟透镜成像算法能真实模拟聚焦过程。
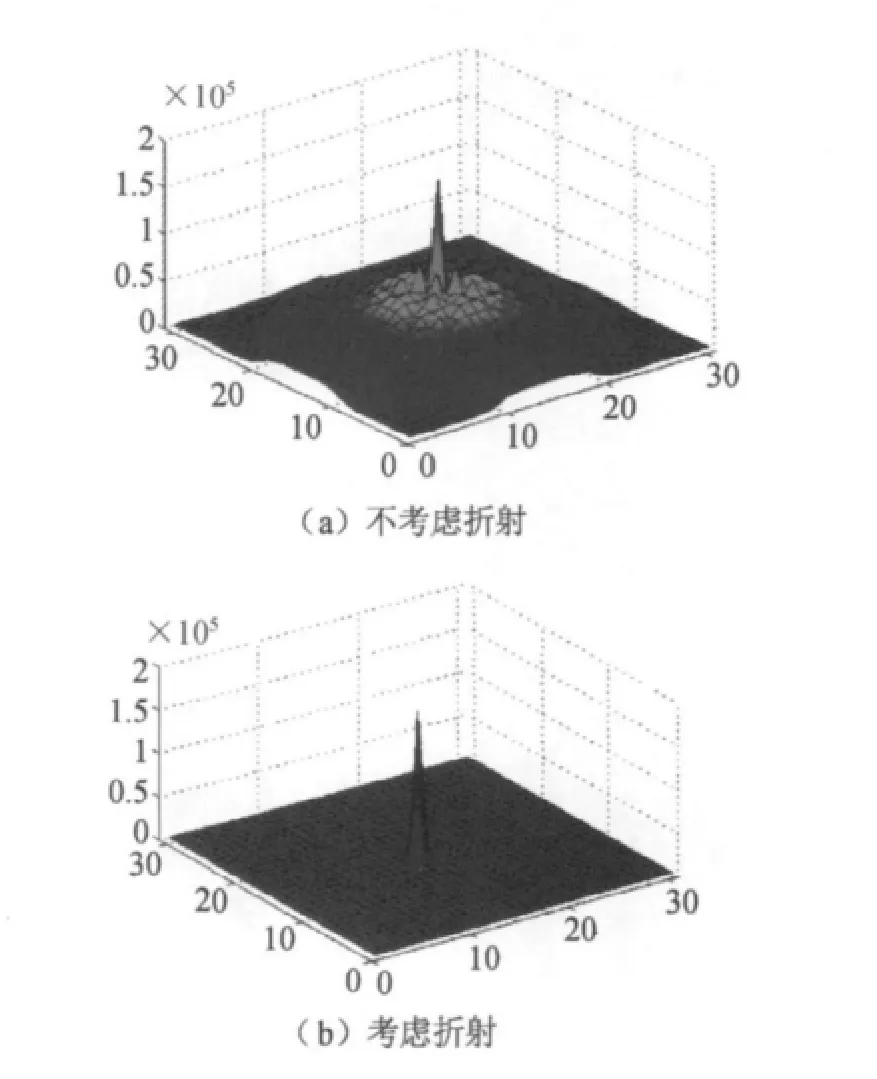
图6 虚拟透镜聚焦实验
设置合适的透镜参数,利用图4口径场计算结果,采用虚拟透镜成像算法,获得的成像结果,如图7所示,其中a为1倍放大的像,b为经过变焦后2倍放大的像。
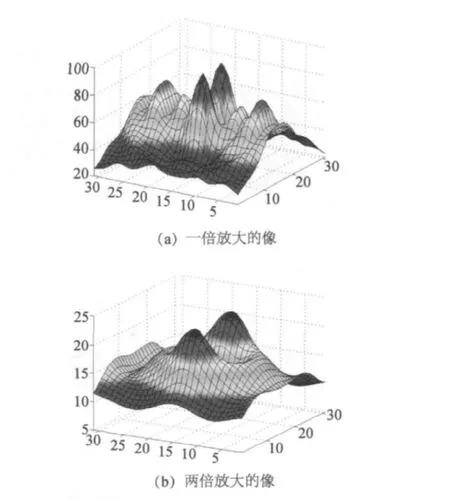
图7 虚拟透镜成像结果
在图7给出的散射体像中,与图3所示介质透镜成像相比较,中心部分的两个强散射点已经清晰可见。
5 雷达目标识别
对目标进行识别,如果仅仅在横向距离上进行,由于目标姿态角的变化,识别存在很大的困难[3]。在脉冲体制高精度跟踪雷达中,如果将径向距离高分辨与透镜成像的横向距离分辨相结合,则可形成目标在径向距离上的系列成像切片,从而构成目标的空间三维像。三维成像示意图,如图8所示。

图8 雷达目标三维成像示意图
在这种三维成像体制中,由于所成的像是目标散射点的三维分布图,可以一定程度减小目标姿态角变化给识别带来的不良影响,提高目标识别的可靠性。
但是,对于雷达而言,最大的问题是目标距离较远,对远距离的目标用透镜一次成像效果较差,已经无法直接识别出散射点沿横向距离的分布情况。在天文学研究领域得到广泛应用的望远镜可以为解决这个问题提供帮助,天文望远镜、射电天文望远镜在天文学、航天领域的大量应用已经说明其工作可靠性。
望远镜的基本工作原理是利用两个焦距不同的透镜,第一个透镜将远距离物体的光聚焦,形成一个在焦点附近的较小的像,第二个透镜对这个近距离的较小的像进行放大,从而可以清晰地观察远处的物体,如图9所示。

图9 望远镜原理
现代相控阵雷达技术的发展为该技术的应用奠定了基础,大型相控阵天线可以提供大口径接收场,为后续的微波透镜成像或虚拟透镜成像提供数据支撑。这种方法是否切实可行还有待进一步研究和验证。
目前,微波透镜成像技术用于雷达目标识别的主要瓶颈是在微波频段电磁波绕射、衍射效应严重,微波透镜成像的效果较差,实用性不强。提高雷达的工作频率,使用毫米波、亚毫米波等有望提高微波透镜成像的效率。此外,采用虚拟透镜成像技术,研究合适的透镜成像算法也是较好的选择,并且这种虚拟透镜成像技术还不会大量增加雷达的成本和硬件的复杂性。
5 结语
本文开展了微波透镜成像技术及其在雷达目标识别中的应用研究。提出了利用望远镜的工作原理,提高雷达目标的横向距离分辨力,结合距离高分辨,进行雷达目标识别的新概念。此外,针对微波频段的电磁波绕射、衍射效应严重,微波透镜成像效果较差的问题,提出了虚拟透镜成像技术,并进行了成像验证,获得较好的成像效果。
[1]CUTRONA L J.Synthetic Aperture Radar[M]//Radar Handbook,M.Skolnik.New York:McGraw-Hill,1990.
[2]KERR D,MUSMAN S,BACHMANN C.Automatic Recognition of ISAR Ship Images[C].IEEE Trans.1996(AES-32):1392-1404.
[3]MERRILL I.SKOLNIK.雷达系统导论[M].第三版.北京:电子工业出版社,2010.
猜你喜欢
通信技术(2022年5期)2022-06-11
电讯技术(2022年1期)2022-02-12
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
摄影与摄像(2021年12期)2021-10-01
中山大学学报(自然科学版)(中英文)(2021年4期)2021-09-10
艺术品鉴(2021年21期)2021-08-15
锦绣·上旬刊(2020年3期)2020-06-08
