
风洞虚拟飞行试验模拟方法研究
2011-06-15 01:27赵忠良范召林
实验流体力学 2011年6期
李 浩,赵忠良,范召林
(中国空气动力研究与发展中心 空气动力学国家重点实验室,四川 绵阳 621000)
风洞虚拟飞行试验模拟方法研究
李 浩,赵忠良,范召林
(中国空气动力研究与发展中心 空气动力学国家重点实验室,四川 绵阳 621000)
风洞虚拟飞行试验是把飞行器模型安装在风洞中具有三个转动自由度的专用支撑装置上,让三个角位移可以自由转动或者按照飞行器的飞行要求实时操纵控制舵面,来实现较为逼真的模拟飞行器真实机动运动过程,进而达到探索其气动/运动耦合机理的目的。发展风洞虚拟飞行试验,其模拟方法是必须要解决的核心理论问题。针对某典型导弹,开展了铅垂平面内三自由度俯仰运动的开环控制和闭环控制飞行仿真模拟,分析了风洞虚拟飞行试验和真实飞行之间的主要差异及其影响,研究了风洞虚拟飞行试验的模拟方法。结果表明:对铅垂平面内的三自由度俯仰运动,采用俯仰角速度反馈的经典三回路自动驾驶仪闭环控制方式,风洞虚拟飞行试验能够较为逼真地模拟真实飞行过程。
风洞虚拟飞行试验;模拟方法;闭环控制;飞行仿真;真实飞行机动
0 引 言
飞行器在大迎角高机动飞行时,姿态角、角速度和角加速度等运动参数随时间剧烈变化,引发飞行器的绕流出现强烈的非定常特性,气动力呈现迟滞、突变与分叉等非线性特征,气动力不仅取决于飞行器的运动姿态,而且严重依赖于运动的时间历程、振幅和频率等参数;气动力的非线性变化又会导致飞行器运动参数的剧烈变化,从而使飞行器的运动参数和气动参数形成强烈的非线性耦合[1]。
传统的静态风洞试验、小振幅强迫振荡试验、尾旋风洞试验、单轴和多轴协调大振幅强迫振荡试验等都无法有效模拟飞行器机动运动过程,需要发展能够更为逼真的模拟真实机动飞行过程的试验方法——风洞虚拟飞行试验(Wind Tunnel Based Virtual Flight Testing,简称 WTBVFT)[2-3]。风洞虚拟飞行试验是把飞行器模型安装在风洞中具有三个转动自由度的专用支撑装置上,让三个角位移可以自由转动或者按照飞行器的飞行要求实时操纵控制舵面,实现较为逼真的模拟飞行器机动运动过程,并同时测量飞行器气动和运动参数,检验飞行器响应和操纵控制特性,达到气动/运动一体化研究、探索气动/运动耦合机理的目的。发展风洞虚拟飞行试验,其模拟方法是必须要解决的核心理论问题。
针对某典型导弹,开展了铅垂平面内三自由度俯仰运动的开环控制和闭环控制下的飞行仿真模拟,分析了风洞虚拟飞行试验和真实飞行之间的主要差异及其影响,研究了风洞虚拟飞行试验的模拟方法。
1 风洞虚拟飞行试验和真实飞行的主要差异及影响
1.1 主要差异
真实飞行中,刚体飞行器一般有6个自由度:质心的3个平动运动和绕质心的3个转动运动。飞行器速度大小的变化会导致飞行M数和Re数的改变。飞行器速度的空间方向可用航迹倾角γ和航迹偏角χ来确定,航迹倾角会导致飞行高度的变化。
风洞虚拟飞行试验中,模型质心固定不动,线位移被约束,只允许绕质心的3个转动运动,试验过程中气流速度大小和方向不变。气流速度大小不能改变,造成与真实飞行的M数和Re数不一致。模型线位移被约束,造成其速度方向不能改变,且航迹倾角始终为γ=0。当真实飞行的速度大小发生变化或有航迹倾角时,模型运动和真实飞行会存在差异。
因此,风洞虚拟飞行试验模型运动与飞行器真实飞行就存在两个主要差异:线位移约束和速度大小变化(以下简称速度变化)。
1.2 差异影响
针对某典型导弹,开展铅垂平面内的三自由度俯仰运动开环控制飞行仿真,分析线位移约束和速度变化的影响。
1.2.1 导弹纵向动力学模型[4]
铅垂平面Oxgzg内的三自由度俯仰运动(如图1)指在运动过程中,飞行器纵对称面始终与其速度矢所在的铅垂平面相重合;飞行器沿地面坐标系Oxg轴和Ozg轴的平移运动和绕Oyg轴的俯仰转动运动。
体轴系下三自由度俯仰运动方程为:
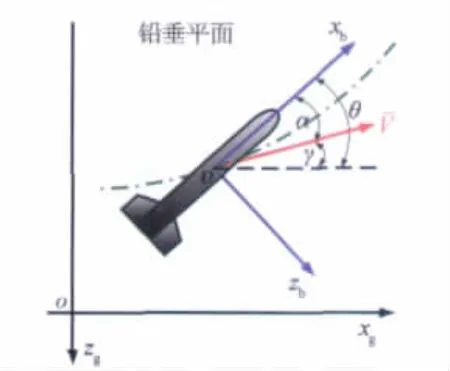
图1 铅垂平面内的三自由度俯仰运动Fig.1 The 3-DOF pitching motion in the vertical plane
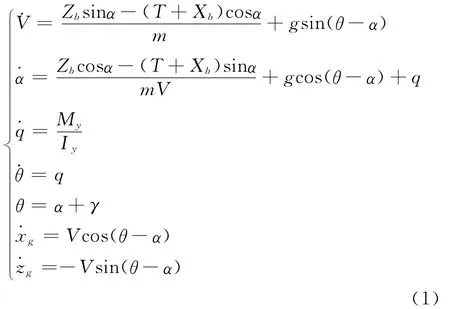
风洞虚拟飞行试验模型的线位移被约束,变成单自由度俯仰运动,运动方程为:

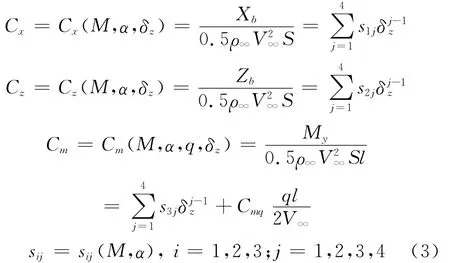
1.2.2 导弹气动力数学模型[5]
根据风洞试验结果建立了导弹非线性气动力数学模型为:
1.2.3 导弹开环控制飞行仿真结果分析
给定舵偏控制律:δz(t)=-10°,t≥0。
图2给出了开环控制下导弹纵向运动仿真结果,模拟了速度不变的三自由度和单自由度俯仰运动、速度变化单自由度俯仰运动3种情况。其中速度不变的单自由度运动对应于风洞虚拟飞行试验情况。
(1)线位移约束的影响
比较速度不变的三自由度(红虚线)和单自由度(蓝实线)俯仰运动可以看出:两者存在显著差别。线位移约束后,单自由度俯仰运动迎角和俯仰角速度的振幅和频率都比三自由度俯仰运动的大,且两者的差别随时间的增加而增大。原因是三自由度俯仰运动能够经历平动运动,运动过程中航迹倾角的不断变化造成迎角和俯仰角速度与单自由度的不同。
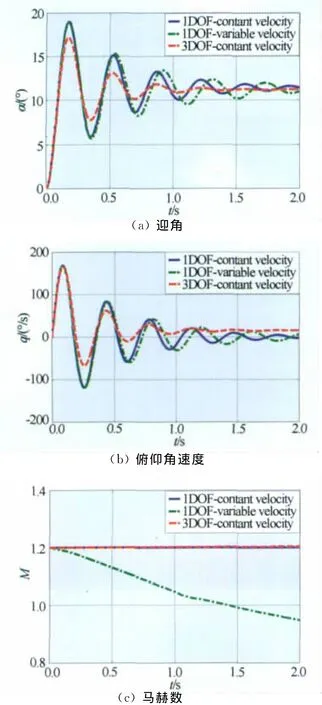
图2 开环控制仿真结果Fig.2 Results of the open-loop simulations
(2)速度变化的影响
比较速度不变(蓝实线)和变化(绿点划线)的单自由俯仰运动可以看出:相对于速度变化时,速度不变的单自由度俯仰运动迎角和俯仰角速度的振幅较小,频率较高。原因是速度的变化会产生俯仰力矩的附加量,造成与速度不变时的俯仰力矩不同,进而导致两者迎角和俯仰角速度存在差别。
对比单自由度和三自由度俯仰运动可以看出:线位移约束和速度变化会导致单自由度与三自由度俯仰运动存在显著差异,进而会影响气动力和力矩。
因此,风洞虚拟飞行试验需要对线位移约束和速度变化进行修正,但由于目前风洞试验无法实现气流速度的快速变化,故应重点对线位移约束进行修正,来实现较为逼真的模拟真实飞行过程。
2 风洞虚拟飞行试验模拟方法分析
导弹开环控制运动仿真结果表明:开环控制下线位移约束的运动与真实飞行存在显著差异,不能够逼真模拟真实飞行。因此,风洞虚拟飞行试验不能采用开环控制方式。为此开展导弹俯仰运动闭环控制飞行仿真,分析风洞虚拟飞行试验的模拟方法。
导弹闭环控制采用经典三回路自动驾驶仪[6],导弹过载加速度由加速度计测量,角速度由角速度陀螺仪测量并反馈到自动驾驶仪。
对风洞虚拟飞行试验,角速度反馈可以采用两种方法:第一种方法是直接反馈由角速度陀螺仪测量的迎角角速度;第二种方法是利用重构的俯仰角速度作为反馈。第一种方法不需要重构角速度反馈信号,陀螺仪的测量输出可以直接用于反馈,但与真实飞行中的角速度存在差异。第二种方法是利用角速度陀螺仪测量的加上飞行轨迹仿真计算得到的,来重构俯仰角速度=+。这种反馈方式能够模拟真实的自动驾驶仪控制,但需要信号的重构和附加的运动仿真。图3和4给出了采用迎角角速度和俯仰角速度反馈两种闭环控制方式的飞行仿真原理图。
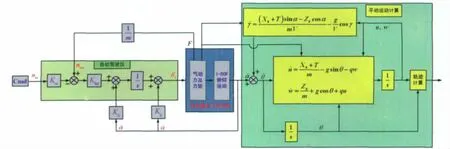
图3 迎角角速度反馈的闭环控制飞行仿真原理图Fig.3 Block diagram for acceleration autopilot using angle of attack rate feedback

图4 俯仰角速度反馈的闭环控制飞行仿真原理图Fig.4 Block diagram for acceleration autopilot using pitch rate feedback
给定法向过载加速度指令:
图5给出了闭环控制运动仿真结果。模拟了速度不变(红虚线)和变化(黄虚线)的三自由的俯仰运动、速度不变采用迎角角速度(绿实线)和俯仰角速度(蓝实线)反馈的单自由度俯仰运动四种情况。其中速度不变的三自由度俯仰运动对应于真实飞行中的定常机动运动情况;速度变化的三自由度俯仰运动对应于真实飞行过程中速度变化的情况;速度不变的单自由度俯仰运动对应于风洞虚拟飞行试验情况。

2.1 速度不变
2.1.1 迎角角速度反馈
采用迎角角速度作为反馈时,真实飞行和风洞虚拟飞行试验之间存在差异,原因在于:真实飞行中,反馈到自动驾驶仪的是总俯仰角速度,而风洞虚拟飞行中只有迎角角速度反馈到自动驾驶仪。在平衡迎角处=0,俯仰力矩Cm=0,对真实飞行,由于导弹仍在机动,其航迹倾角≠0,导致俯仰角速度q=≠0。对风洞虚拟飞行试验,由于模型线位移被约束,运动过程中航迹倾角始终为零,因此模型的俯仰角速度q==0。由俯仰力矩:

为了达到平衡,真实飞行导弹和风洞虚拟飞行试验模型的舵偏角会调整到不同值,进而导致两者最终的平衡迎角存在差异,如图5(c)、(d)。
2.1.2 俯仰角速度反馈
从仿真结果可以看出,采用俯仰角速度作为反馈时,单自由度运动的法向过载、迎角、舵偏角、俯仰角速度的时间变化历程和仿真计算的飞行轨迹与速度不变的三自由度运动非常接近。说明采用俯仰角速度反馈的闭环控制方式,风洞虚拟飞行试验能够较为逼真的模拟速度不变的真实飞行情况。
2.2 速度变化
对速度变化的真实飞行,从速度变化的三自由度俯仰运动和速度不变采用俯仰角速度反馈的单自由度俯仰运动仿真结果可以看出,风洞虚拟飞行试验和真实飞行存在一些差异。这是由于对真实飞行,飞行速度不断减小(如图5(b)),要满足指令法向过载,就必须不断的增加迎角,提高法向力系数,为此舵偏角就会不断增加,直到其极限偏转值。
由于风洞试验过程中的马赫数几乎是不变的常值,因此风洞虚拟飞行试验过程中对保持指令加速度不存在问题。但由于风洞中不能迅速改变马赫数(变化时间在1s量级),造成两者迎角和舵偏角的差异。尽管风洞虚拟飞行试验和真实飞行的马赫数不同,但两者的运动过程也显示出相似性。
3 结 论
通过以上分析,可以得出以下主要结论:
(1)风洞虚拟飞行试验和真实飞行的主要差异有两个:线位移约束和速度变化,需要重点开展线位移约束修正;
(2)采用开环控制方式,风洞虚拟飞行试验与真实飞行存在显著差异;
(3)对经典三回路自动驾驶仪控制,采用俯仰角速度反馈的闭环控制方式,风洞虚拟飞行试验能够补偿线位移约束的影响,实现较为逼真的模拟真实飞行过程。但由于速度变化的影响无法补偿,会造成风洞虚拟飞行试验和真实飞行之间的一些差异。
[1]ROBERT C N.The unsteady aerodynamics of slender wings and aircraft undergoing large amplitude maneuvers[J].Progress in Aerospace Sciences,2003,39(3):185-248.
[2]GLENN G,JOY K,JUAN L.Wind tunnel based virtual flight testing[R].AIAA 2000-0829.
[3]GLENN G,JOY K,JUAN L.Virtual flight testing in aground test facility[R].AIAA 2000-4019.
[4]方振平,陈万春,张曙光,等.航空飞行器飞行动力学[M].北京:北京航空航天大学出版社,2005.
[5]何开锋,王文正,钱炜祺.根据风洞试验结果建立有尾翼导弹数学模型[J].流体力学实验与测量,2004,18(4):62-66.
[6]CURTIS P M.Missile longitudinal autopilots:connections between optimal control and classical topologies[R].AIAA 2005-6381.

李 浩(1982-),男,河南洛阳人,助理研究员。研究方向:实验空气动力学。通信地址:四川绵阳中国空气动力研究与发展中心(621000);E-mail:lihao_34@sina.com
Simulation method for wind tunnel based virtual flight testing
LI Hao,ZHAO Zhong-liang,FAN Zhao-lin
(State Key Laboratory of Aerodynamics,China Aerodynamics Research and Development Center,Mianyang Sichuan 621000,China)
It is desired to develop a test technique that could replicate the actual free-flight in the wind tunnel.The Wind Tunnel Based Virtual Flight Testing(WTBVFT)would provide this capability.The WTBVFT environment calls for a specialized test model support system,which allows for“free”three-dimensional rotation of the test model.Actual flight hardware could be mounted in the test model and“virtually fly in the wind tunnel”under its own flight control.This paper discusses the simulation method for WTBVFT.Preliminary simulation analyses using 3-DOF pitching motion models in the vertical plane have been conducted with positive results.The objective was to compare the response of a free-flight vehicle with the WTBVFT environment simulation.Test cases included open-loop airframe and closed-loop autopilot controlled cases.These results indicate that for typical autopilot controlled cases the WTBVFT environment is capable of replicating the actual free-flight behavior within acceptable differences.
WTBVFT;simulation method;closed-loop control;flight simulation;actual maneuver
V211.71
A
1672-9897(2011)06-0072-05
2011-01-01;
2011-03-01
国家安全重大基础研究项目(61389)
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
军民两用技术与产品(2021年8期)2021-11-24
北京航空航天大学学报(2021年6期)2021-07-20
小哥白尼(野生动物)(2020年3期)2020-07-27
———重庆建成世界一流汽车风洞
汽车零部件(2019年7期)2019-08-16
数学大王·中高年级(2018年11期)2018-12-17
电子制作(2018年11期)2018-08-04
电脑知识与技术(2016年18期)2016-11-02
大学教育(2016年7期)2016-07-27
科技传播(2014年4期)2014-12-02
