
基于投影变换与轨迹关联的目标检测算法
2011-06-14 01:37:52胡礼勇李建军
无线电工程 2011年6期
胡礼勇,李 钊,李建军,郭 刚
(1.第二炮兵青州士官学校,山东青州262500;2.第二炮兵驻石家庄地区军事代表室,河北石家庄050081)
0 引言
近年来,随着人们对运距离、低信噪比条件下的点状微弱运动目标的检测跟踪技术要求的提高,如何实时快速地检测出小目标成为目前的研究热点。微弱点状目标不同于大目标,它没有大小、形状和纹理等特征信息可以利用,且目标点的辐射强度较弱,通常被背景和杂波所掩盖,因此,不可能用传统的单帧检测技术来检测提取目标,必须采用时空联合多帧检测技术。为解决此问题,提出了一种结合投影检测和轨迹关联搜索的方法,通过投影构造组合帧,将三维时空上的轨迹映射到二维平面图像上,同时构造帧信息的染色图,然后在组合帧图像上按照先跟踪后检测的思路进行轨迹搜索,目标检测。仿真结果表明,该方法能准确地检测出低信噪比条件下点状运动目标。
1 基于最大值投影的目标检测算法
直接对三维图像序列进行处理所需计算量很大,目前很难实时实现,为此采用了投影变换的检测算法。基于投影变换的检测算法主要是将三维空间的图像沿时间轴投影到二维图像空间,再在二维空间上对目标可能轨迹进行统计检测,最后将检测结果映射到三维空间上形成最终的检测结果。通过将三维时空域上的轨迹检测问题转化为二维平面上的轨迹检测问题,从而使轨迹搜索的运算量大大减少。该算法将目标检测和图像的背景抑制结合在一起,通过求最大值图像和平均值图像,然后将2幅图像做差分运算,获得经过背景抑制后的图像,后经阈值分割,得出候选目标点,然后利用轨迹关联算法检测出作直线运动的目标点。
1.1 序列图像的投影变换
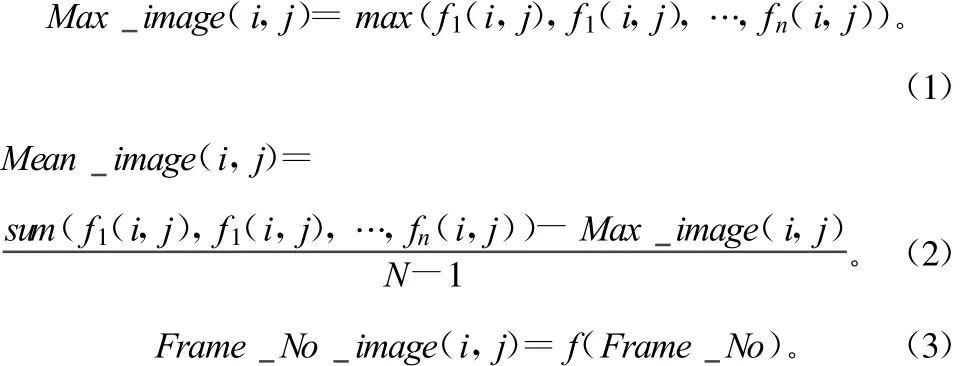
将送入处理单元的N幅原始图像通过投影变换求取最大值图像、平均值图像以及帧序号染色图像。其主要思想是求该N幅图像各个像素点灰度的最大值,将该灰度值作为最大值图像在该像素点的灰度值,同时将该像素点所在的帧序号按照一定的灰度变换方法构造帧序号染色图像在该点的灰度值。将N幅图像在同一像素点的灰度值之和作为和值图像在该点的灰度值。然后将和值图像减去最大值图像除以N-1作为平均值图像。由于目标点的灰度值比背景点大,故最大值图像中必定包含目标点,同时帧序号染色图像包含了目标点出现的时间信息。表达式为:
1.2 时间预测图像的获取
时间预测图像为最大值图像减平均值图像。平均值图像中包含了静态的背景目标点,通过差分运算,在消除了静态目标点的同时抑制了背景。

1.3 候选目标点的提取
候选目标的提取是通过自适应阈值分割算法实现的。基于目标图像计算出背景噪声的水平,按照设定的虚警率和漏警率计算阈值,对轨迹图像进行自适应阈值滤波。把图像分割成k1×k2个大小相同的子图,对每个子图,重复进行以下操作:

式中,E为区域象素的平均值。
这种算法基于目标窗口图像的统计数据计算出一个阈值。超过阈值的像素被赋予一个常值,或保持源值(非零)。阈值通常定义为:

候选目标像素面积大则增加 α;否则,候选目标像素面积小而导致跟踪处理器无法锁定当前有效的候选目标,则减小 α。
1.4 质心坐标的求取
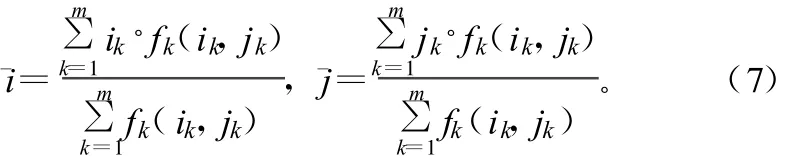
设在组合帧图像中的某个目标点由点集T=组成,其中m为构成该目标点的像素个数,fk(xk,yk)表示位于(xk,yk)像素点的灰度值。根据灰度值加权计算质心坐标的方法可以得到:
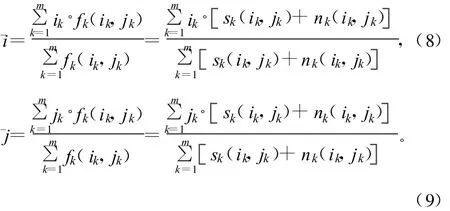
经过背景抑制等前端处理后的图像的场景模型为:I(i,j,k)=s(i,j,k)+n(i,j,k),其中s(i,j,k)表示目标灰度值,n(i,j,k)表示噪声,则质心坐标公式为:
1.5 目标检测算法的设计
序列图像中的微弱点状目标,虽然从长时间来看存在较多的不确定因素,但由于成像系统的成像频率很高,在短时间内点目标具有平稳特性,主要表现为在短时间内目标的灰度值可以近似认为不变和目标可以近似认为作匀速直线运动。经过最大值投影后,目标点在三维时空坐标中的运动轨迹被投影到二维组合帧图像中,利用目标可以近似认为作匀速直线运动的特性,检测出作直线运动的目标点。常用的方法有轨迹关联算法和哈夫变换算法,这里采用轨迹关联进行目标检测,具体步骤为:
①寻找预测最大值图像,构造帧序号图像;
②寻找帧时间序列中除最大值图像外的平均值图像;
③将最大值图像和平均值图像做差分运算,消除整个图像序列中的静态目标,得到经过背景抑制后的组合帧图像;
④对组合帧图像进行阈值分割;
⑤利用区域生长方法求取各个候选目标点的质心坐标;
⑥结合帧序号图像,在分割后的图像上进行轨迹关联,检测出运动点目标。
2 仿真试验及结果分析
2.1 一个目标点
仿真试验中所采用的星图图像信噪比SNR=2,点目标的大小为4个像素,目标的运动速度为vx=5.8 pixel/frame,vy=-6.2 pixel/frame,图像尺寸为128×128像素。根据该图像序列的信噪比,从计算量和检测性能综合考虑,分别选用了3~10帧进行最大值投影,在组合帧上检测到目标的位置点数如表1所示。

表1 检测到的目标点数及检测百分比(单一目标)
从表1可以看出,利用本文方法可有效检测出目标点,且选用的图像帧数越多检测效果越好,当选用10帧进行最大值投影检测,目标点位置都被准确提取。
2.2 交叉运动的两个目标
仿真试验中所采用的星图图像信噪比SNR=2,目标点大为4个像素,目标点一的运动速度为vx=6.2 pixel/frame,vy=5.7 pixel/frame,目标点二的运动速度为vx=-4.7 pixel/frame,vy=6.8 pixel/frame图像尺寸为128×128像素。根据该图像序列的信噪比,从计算量和检测性能综合考虑,分别选用3~10帧进行最大值投影,在组合帧上检测到目标的位置点数如表2所示。
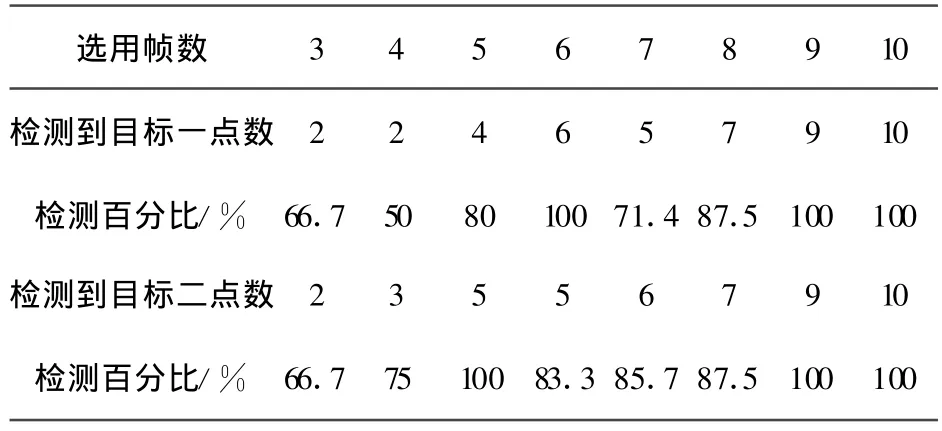
表2 检测到的目标点数及检测百分比(交叉运动目标)
从表2可以看出,利用本文方法可有效检测出目标点,且选用的图像帧数越多检测效果越好,当选用9帧进行最大值投影检测,所有目标点位置都被准确提取。
3 结束语
上述提出的结合投影检测与轨迹关联搜索的序列图像点状运动目标检测算法根据最大值投影后的组合帧以及帧序号的染色图,利用轨迹关联的方法检测点状运动目标。在实际运用中,组合帧的数目的增加对提高检测率是有利的,但同时也增加了计算量和虚警率,必须根据实际性能的需要对有关参数进行合理设置。仿真试验表明,通过合理选择组合帧数,该方法能在低信噪比条件下检测出单一和交叉运动目标,且算法简明,易于编程实现。
[1]REED S,R OBERT M.A Recursive Moving-Target-Indication Algorithm for Optical Image Sequences[J].IEEE Trans.on Aero.And Elect.Sys,1990,26(3):434-440.
[2]陈 颖.序列图像中微弱点状运动目标检测及跟踪技术研究[D].成都:电子科大博士学位论文,2003:10-13.
[3]崔常嵬,林 英,陈景春.信噪比缓动点目标的序贯检测算法的分析与改进[J].电子学报,2001,29(6):820-823.
[4]钟圣芳,张 兵,卢焕章.一种基于动态规划的点目标轨迹该关联算法[J].计算机测量与控制,2004,12(8):772-774.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 02:00:02
高技术通讯(2021年3期)2021-06-09 06:57:48
数学物理学报(2021年1期)2021-03-29 03:14:42
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25 01:40:34
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
学生天地·小学低年级版(2019年5期)2019-06-05 01:15:11
学生天地(2019年15期)2019-05-05 06:28:28
电子测试(2018年11期)2018-06-26 05:56:02
雷达学报(2017年3期)2018-01-19 02:01:27
自动化学报(2017年5期)2017-05-14 06:20:56
