
导弹遥控过程的CADET算法精度分析
2011-06-07 01:34花寅东赵利强邹士新
电光与控制 2011年11期
花寅东,赵利强,邹士新
(中国空空导弹研究院,河南 洛阳 471009)
0 引言
对于雷达型导弹导引头已截获目标后的导弹系统制导精度分析,CADET算法获得了广泛的应用,并有了系统的分析方法和模式。但对于导弹遥控精度这一类问题的分析,目前仍无有效的分析方法。
本文采用一个简单的二维导弹模型,仅考虑导弹的非线性误差、导弹的加速度计误差、以及机载雷达的目标探测误差,并引入CADET算法进行定量计算,从而得出各误差对遥控精度的不同影响程度,成功地对该类问题进行编程和仿真。该分析结果有助于设计者进行针对性设计和调整,提高遥控精度,进而提高导弹的制导精度,增大导弹的截获概率。
1 误差模型
遥控过程工作中的主要误差源有以下几个:载机和导弹坐标系的初始对准误差、非线性因素的误差、机载雷达的目标探测误差以及惯性器件误差。为了使仿真结果更具代表性,应该尽可能将上述误差都考虑进去,不过同时工作量也会有很大的增加。综合考虑后,假设载机和导弹坐标系初始对准很精确,惯性器件中的陀螺也没有误差,考虑导弹的非线性因素误差、导弹的加速度计误差、机载雷达的目标探测误差对遥控精度的影响。
1.1 非线性因素误差模型
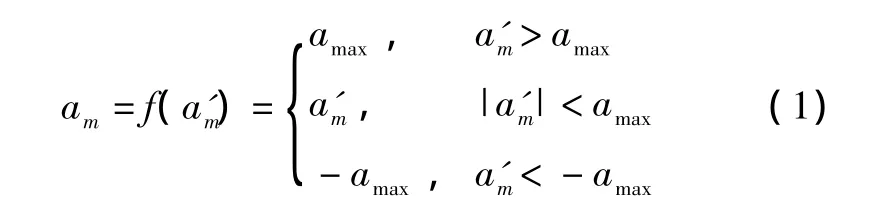
遥控过程中,非线性因素也有很多,如:加速度指令限制、弹体的非线性、坐标变换、导引头天线罩像差等。在此,考虑加速度指令限制,让导弹的y向加速度经过一个限幅器,得到真实的y向加速度,可用式(1)表示:
处理该非线性因素时,对该模型采用准线性化,先求其统计量:

对其进行准线性化:

其中的参数可直接利用式(1)计算:
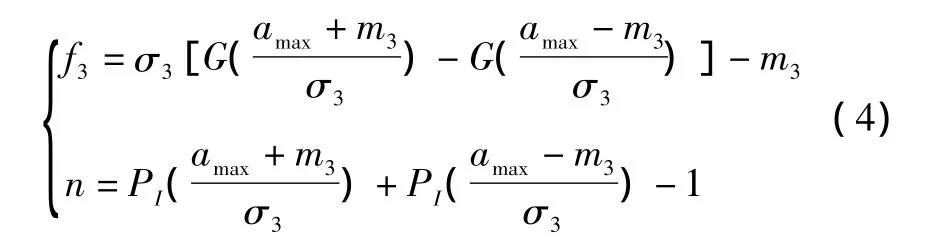
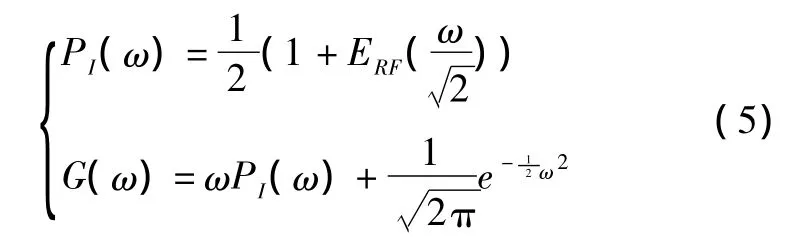
其中的函数定义如下:
1.2 导弹加速度计误差模型
遥控过程中,导弹y向加速度由加速度计测量[2],所得误差为

式中:ax,ay,az为导弹 x,y,z向加速度;Sy为标度因数误差;Mx,Mz为交叉耦合因数;Bf为测量零偏;Bv为振摆误差系数;ny为随机零偏。
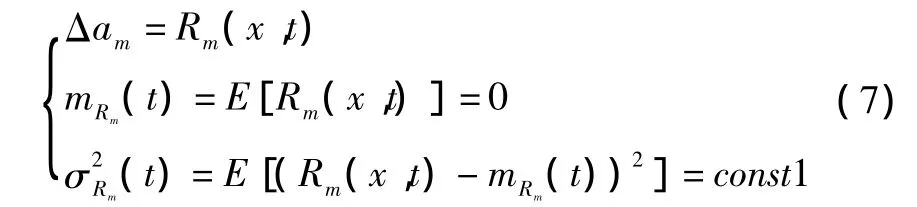
而事实上,考虑的是加速度计的误差整体对遥控精度的影响,因此若是用上述表达式来分析,所得到的也是加速度计误差的各个分量对遥控精度的影响。所以,此处不采用该误差模型,而直接假设加速度计误差为一个高斯白噪声R(x,t),其统计量函数可设定为均值是0,方差为一常数。即:
1.3 机载雷达目标探测误差模型
同样的,用机载雷达测得的目标加速度,其误差也用一个高斯白噪声表示,且与加速度计误差白噪声互不相关,其统计量函数均值也是0,方差为一常数。表达如下。
另外的,CADET算法的作用函数w(t)分解为确定性分量与随机分量之和,事实上其中的随机分量也可以认为是噪声误差项。为了研究方便,同样认为该随机分量是一个高斯白噪声,这些白噪声相互独立,互不相关。
2 系统模型
真实的系统模型需要对导弹以及目标进行力和力矩分析,分别列出运动学和动力学方程,之后求解出各个参数。不过在此,所研究的主要是导弹和目标的加速度,涉及的参数远远少于真实的系统。因此,可以直接忽略动力学方程,只需对导弹和目标进行运动学的假设,就可以推导出整个系统的方程。
导弹的遥控过程示意图见图1[1]。

图1 导弹遥控过程示意图Fig.1 The sketch map of missile’s remote control process
遥控过程需要的时间为T(即拦截时间为T),考虑t时刻的情况,则还需要飞行的时间为tgo=T-t。导弹、目标的速度与加速度都在图1中标注,不再具体说明。
考虑y方向上的相对距离y(t),与y方向的导弹加速度、目标加速度有如下关系:

自动驾驶仪用如下线性模型的传递函数表示:

载机测得目标加速度后将数据传递给导弹,导弹采用比例导引律接近目标,加速度指令a0是与目标线角速度和径向速度之积成正比,比例系数k取为常数3,即:

则未限制的导弹y向加速度满足微分方程:

实际上,导弹的y向加速度还需要经过一个理想限幅器,模拟弹体的结构饱和效应,其表达式已在误差模型式(1)给出。
并假设目标加速度是确定性变量与有限带宽的高斯过程之和,满足:

式中:w为目标机动带宽,仿真时取一常数;w(t)为随机输入。
至此,就有足够的运动学假设方程,取状态量为

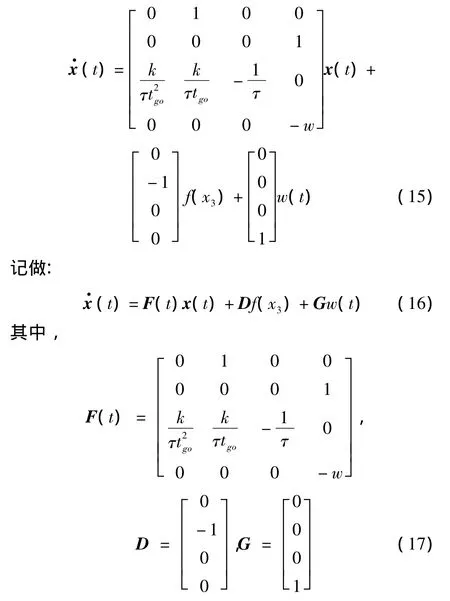
由式(9)、式(12)、式(13),经过近似、化解,可以得到状态方程如下(具体推导过程可参见参考文献[1]):
这时,再加入误差模型,实测值表达为真实值加上误差项,真实值依然满足各个假设的运动学方程。即:

状态量取其实测值,各个运动学方程都需要做变形。如式(9)变为

同理修正式(12)、式(13),得到新的状态方程为
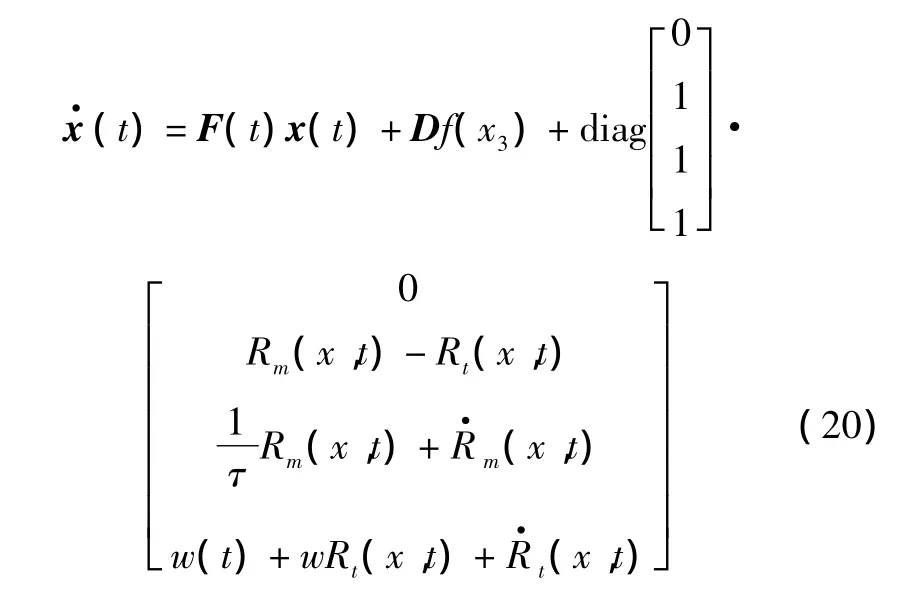
这时,状态方程的最后一项G、w(t)均发生了变化。再利用下述性质:
1)高斯随机过程的线性组合还是高斯随机过程;
2)高斯随机过程的微分(积分)还是高斯随机过程;
3)高斯随机过程的微分(积分)后得到的高斯随机过程,统计量函数是原来的统计量函数的微分(积分)。
性质1)、性质2)在介绍高斯随机过程的书籍中都有推导与证明,在这里可以简单证明一下性质3)。
考虑高斯随机过程分布函数为f(x,t),统计量函数为均值函数m(t),方差函数σ(t);微分后的高斯随机过程统计量函数为均值函数 m'(t),方差函数σ'(t)。

方差函数σ(t)的推导证明复杂一些,但考虑到此时要处理的噪声函数m(t)均为常数0,则其微分也为0,此时有:
同样的,可以推导高斯随机过程积分后的统计量函数表达式。
对误差项进行化解,化成一个噪声项,令:
其系数为对角矩阵:

至此,可以按照定义重新计算该噪声的统计量得:
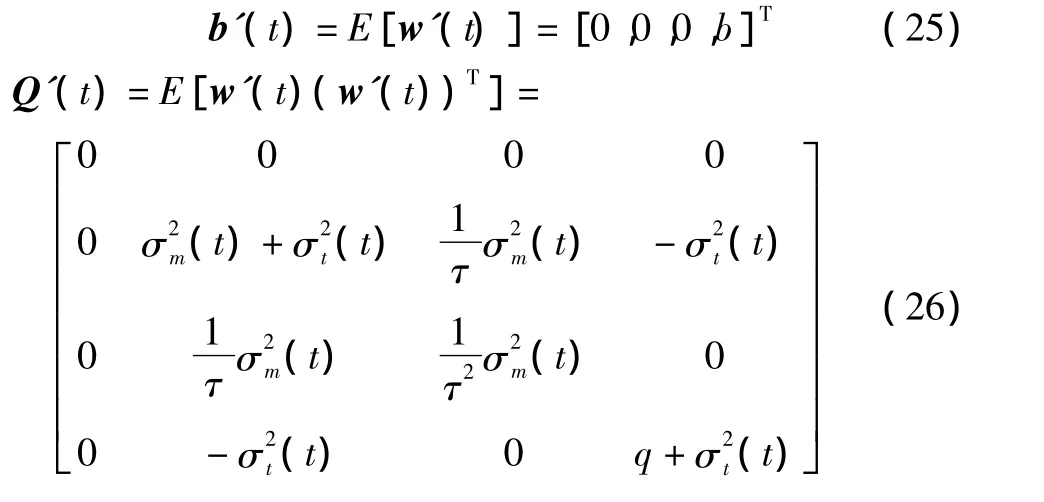
其中:参数b和q是随机输入w(t)的输入统计量,分别代表均值和方差。
将非线性项f(x3)按照式(2)~式(5)进行准线性化,并将状态方程的等式右边前两项整体作为一个非线性函数,则可以推出:

并由 N(t)的计算公式[3]得:
之后代入统计量微分传递方程[4]:

此时,就得到了统计量(包括均值向量和协方差矩阵)的微分传递方程,依次迭代、积分就能得到每一个时刻的统计量,再对此协方差矩阵进行分析,就能看出误差的影响情况了。
至此,完成了系统模型的建立。
3 仿真结果分析
上文推导的系统状态方程以及CADET算法微分传递方程,在已有条件下按照式(27)、式(28)可以得到解算,设定均值向量m与协方差矩阵P的初值为0,目标机动带宽w定为1 rad/s,时间常数τ为1 s,遥控过程的拦截时间T=10 s。
此时,有3 个误差项 amax、Rm(x,t)、Rt(x,t)会对 y向距离均方值σy产生影响,分别代表导弹非线性因素误差、导弹加速度计误差、机载雷达的目标探测误差。其中的两个噪声项由于均值统计量为0,因此主要是噪声的方差σm、σt对y向距离均方值σy造成影响,其中σy越大,表明y向距离在均值上下起伏的波动越大,误差也就越大。
当 amax=8e10、σm=2、σt=2 时,得到的误差分析曲线与无误差时CADET算法解算该模型的曲线[1]比较接近,表明该算法的可行性是可以保障的。如图2所示。
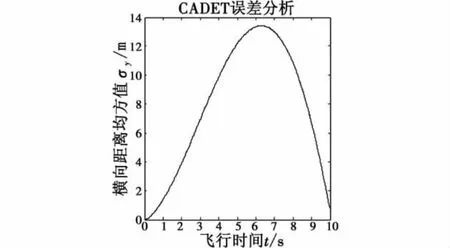
图2 amax无限制、噪声方差很小时的误差分析曲线Fig.2 Curve of error with unbounded amaxand small noise variance
但实际上,amax不可能做到无限制,往往是令其取中等限制amax=8,这时候的曲线在t=7 s之后就能明显地看出是对非线性系统进行近似的准线性系统。此时,再对σm、σt固定其中一个,令另一个的数值进行变动,得到很形象的三维曲线图,即图3。

图3 误差曲线随误差源变动的三维曲面图Fig.3 The 3D error analysis
从图3中可以看出,当导弹加速度计误差σm很小时,误差σy在达到峰值之后,又收敛回零点;但随着导弹加速度计误差σm的增大,σy-t误差曲线也一直在增大,σy峰值的幅度越来越大,取到峰值的时间也在增大,当σm增大到一定程度(约为数值8)后,取到峰值的时间在拦截时间T外,这意味着误差曲线在整个遥控过程中是一直发散的。而机载雷达的目标探测误差σt很小时,误差σy在达到峰值之后,又收敛回零点;随着σt增大,σy越来越快地取到峰值,其峰值的幅度越来越大,之后收敛速度越来越慢,以至在最后拦截时间T时,误差σy的数值还很大。

图4 增大各误差后,误差曲线的变化Fig.4 The change of error curve
此外,还可以对这3个误差源的影响程度做分析:让误差源在程序中对应的参数各自增大同一个数值(仿真时取3),将某项参数改变后的误差曲线集中画在一个图中,就能直观地看出哪个误差源对误差的影响最大。但要注意的是,让非线性因素误差源增大,对应的是限幅器的幅值amax减小,这样对应的线性范围减小,增大了非线性因素;其他的两项误差源对应的参数都应该增大。如图4所示,可以直观地看出,导弹加速度计误差σm是对整个误差影响最大的一个误差源,在t=7.8 s之前机载雷达的目标探测误差次之,非线性因素误差最末;而t=7.8 s之后非线性误差更加明显。这与遥控过程实际工作时的误差分析是一致的。
4 结论
本文将CADET算法应用到导弹的遥控过程进行精度分析,在误差源很小的情况下得到的分析曲线与无误差时CADET算法解算该模型的曲线十分吻合,表明将该算法应用到遥控过程误差模型中是行之有效的。
量化计算误差源对精度的影响,从而判断出最大误差源是导弹加速度计误差,也和实际相符,这说明了该算法在遥控过程误差模型中的精度分析上具有独到之处。
略微不足的是本文为研究方便,并没有采用导弹六自由度的模型,而只是对相关参数做了合适的运动学方程假设;对遥控过程中“载机-导弹-目标”这三者组成的系统的工作过程也没有深入地分析。这可以作为下一步的工作,不断完善系统模型,对真实的导弹模型进行分析,从而能更精确地进行导弹遥控过程精度分析。
[1]TAYLOR J H.战术导弹制导系统直接统计分析手册[M].赵善友,译.上海:第八二五○研究设计所,1978,12:9-13,49-50.
[2]TITTERTON D H,WESTON J L.捷联惯性导航技术[M].张天光,王秀萍,王丽霞,译.北京:国防工业出版社,2007.
[3]PHANEUF R J.Approximate honlinear estimation [D].M.I.T.,Cambridge,Mass.,1968.
[4]JAZWINSKI A H.Stochastic processes and filtering theory[M].New York:Academic Press Inc.,1970.
猜你喜欢
小学生优秀作文(低年级)(2021年11期)2021-12-06
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
语文世界(小学版)(2019年2期)2019-02-24
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年5期)2016-11-07
探测与控制学报(2015年4期)2015-12-15
电影故事(2015年16期)2015-07-14
小天使·一年级语数英综合(2014年7期)2014-06-26
导航定位与授时(2014年2期)2014-04-27
