
摄影测量与遥感所用传感器类型及构像方程
2011-06-07 08:45项仲贞方子岩
铁道勘察 2011年1期
项仲贞 方子岩
(1.湖北工业大学土建学院, 湖北武汉 430068; 2.东南大学, 江苏南京 210096; 3.阳东县建设局, 广东阳东 529900)
1 光学摄影类型传感器和光电成像类型传感器的区别
1.1 光学摄影类型传感器
这类传感器的共同特点是:摄影时由物镜收集到目标反射的电磁波,直接聚焦到感光胶片上曝光成像,通过感光材料的探测与记录,在感光胶片上留下目标的潜像,然后经过摄影处理,得到可见的影像。是否在可见光波段或不可见光波段(例如红外波段、X射线)成像,决定于传感器的结构和胶片的类型(例如全色胶片、红外胶片、X射线专用胶片等)。
1.2 光电成像类型传感器
光电成像类型传感器是将收集到电磁波能量,通过仪器内的光敏或热敏元件(探测器)转变成电能后再记录下来。电能的变化可对应数字的变化,因而可得到数字影像。
相对光学摄影类型传感器而言,光电成像类型传感器的优点在于扩大了探测的波段范围,便于数据的存储与传输。
2 构像方程
2.1 面中心投影框幅影像
框幅式航空摄影机是最常见的一种传感器,可根据框标建立像平面坐标系(如图1、图2),传统的光学模拟型航空摄影机像幅可达到30 cm×30 cm,目前使用的面阵列数码航空摄影机像幅较小。框幅式航空摄影机成像瞬间为一个面,因而称为框幅式。物点A、构像点a和投影中心S按光(电磁波)的直线传播原理3点共线,设描述该航摄像片在空间摄影瞬间的倾斜状态姿态角为φωκ,可以写出描述物点A、像点a和投影中心S共线的数学表达式,即中心投影构像方程式——共线方程
(1)

图1 8个光学框标影像

图2 框幅式摄影机成像
框幅式航空摄影机有光学摄影类型航摄仪和光电成像类型数码航摄仪。工作波段为可见光0.38~0.76μ m。
在近景摄影测量中,一般使用无框标的框幅式摄影机,有光学摄影类型的普通照相机、医学X光照相机、军事上的红外照相机,光电成像类型的普通数码相机。
2.2 线中心投影缝隙影像
线中心投影,指摄影瞬间中心投影获得的影像为一缝隙(如图3、图4)。

图3 缝隙摄影机成像

图4 线阵列推扫式扫描成像
缝隙摄影机和线阵列数码摄影机都是线中心投影。设飞行方向为x轴,缝隙保持水平并且垂直飞行方向沿航线方向推扫。进入缝隙的影像每个瞬间是线中心投影,某物点A的构像点坐标a(0,y),设描述该缝隙在空间的摄影瞬间姿态角为φωκ,对照(1)式,可以写出描述物点A、像点a和投影中心S共线的数学表达式,即缝隙摄影机和线阵列传感器构像方程式
(2)
以多路、连续并具有高光谱分辨率方式获取图像信息的仪器称为成像光谱仪(如图5)。该类型的成像光谱仪是面阵探测器加线阵推扫式扫描仪,工作过程是利用线阵列探测器及其沿轨道方向的运动完成对地物的空间扫描(在成像的几何关系上与CCD线阵列传感器相似,故几何处理时可沿用相应的共线方程式),利用色散元件将收集到的光谱信息分散成若干个波段后,分别成像于面阵列的不同行,对同一目标可获得多个波段的图像。

图5 带面阵的成像光谱仪
获得线中心投影缝隙影像的传感器有:光学摄影类型缝隙摄影机和光电成像类型线阵列CCD传感器,工作波段为可见光0.38~0.76 μm。带面阵的成像光谱仪,具有通道(一个通道对应一个波段)数多且各通道的波段宽度很窄的特点,工作波段为可见光、近红外和短波红外。
2.3 线中心投影缝隙周期摇摆柱面影像
全景摄影机又称摇头摄影机、扫描摄影机(如图6)。这种摄影机的底片呈弧状放置,当物镜扫描一次后,底片旋进一幅,得到一幅柱面影像。全景摄影机成像,其每一幅图像是由一条曝光缝隙沿旁向扫描形成的。对于每条缝隙影像的形成其几何关系等效于框幅摄影机沿旁向倾斜一个扫描角θ后,以中心线(y=0)成像的情况。因此,在任意时刻t获得的缝隙影像是中心投影。
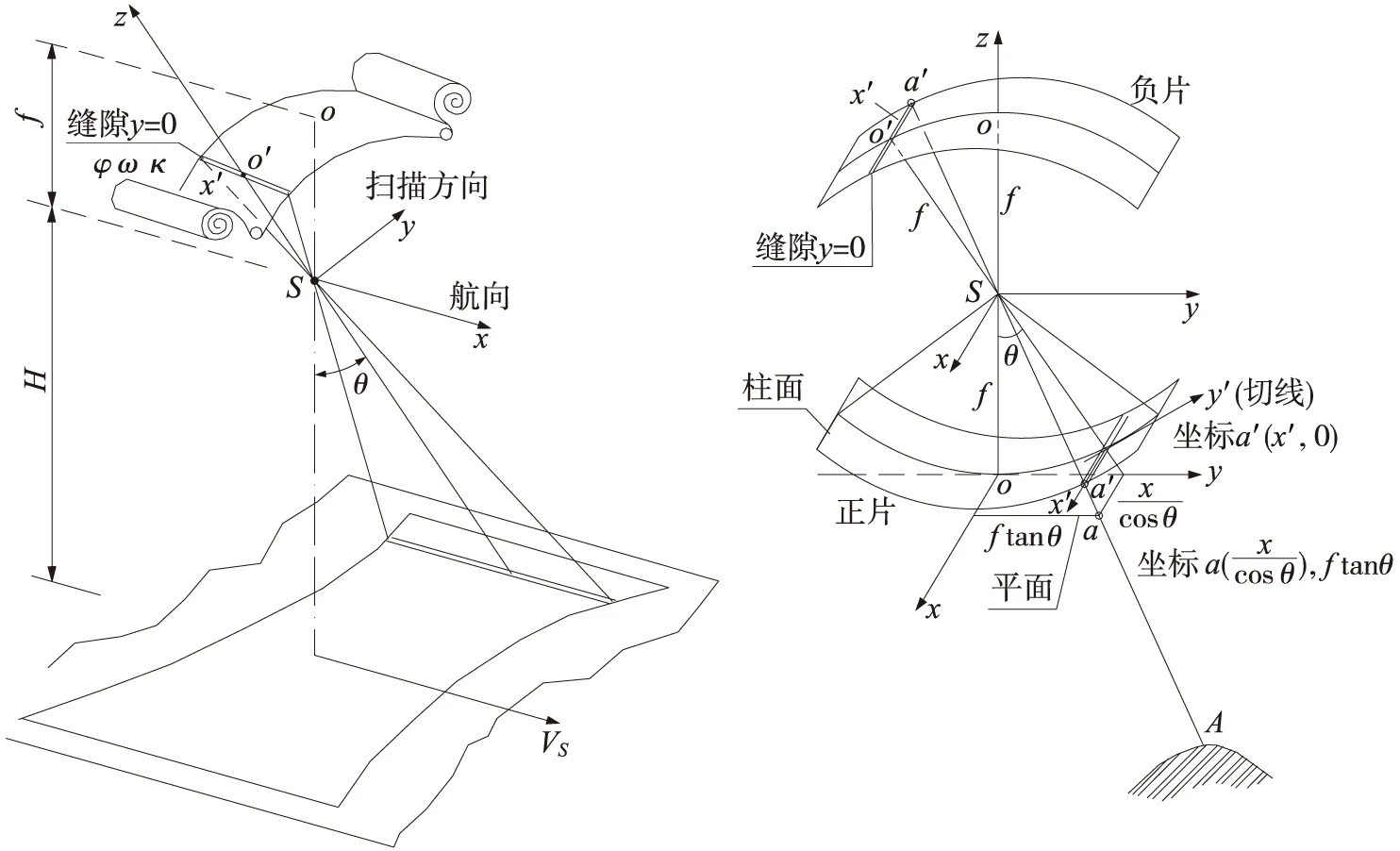
图6 全景摄影机成像
过像幅中心的主距作一平面与柱面相切,按中心投影把柱面上的点投影到平面上,地面物点A在柱面上的构像坐标a′(x,0),平面上的相应点坐标a(x/cosθ,ftanθ),对照(1)式,可以写出描述物点A、像点a和投影中心S共线的数学表达式
(3)
全景摄影机属于光学摄影类型传感器,工作波段为可见光0.38~0.76 μm。
2.4 点中心投影周期转动圆弧线影像
在航空遥感中常用的红外行扫描仪是利用光学系统的机械转动和飞行器向前飞行的两个方向相互垂直的运动,形成对地物目标的二维扫描,逐点将不同目标物的红外辐射功率会集到能将其能量转变成电信号的光电转换器件——红外探测器上。这里采用的是一种点(像元素)扫描方式,每个投影瞬间是点中心投影,任一像点坐标a′(0,0),如图7所示。但一个扫描周期的点影像构成一弧线,不方便讨论其构像方程,现过弧线影像中心的等效主距作一直线与弧线相切,按中心投影把弧线上的点投影到直线上,地面物点A在弧线上的构像坐标a′(0,0),直线上的相应点坐标a(0,ftanθ),对照(1)式,可以写出描述物点A、像点a和投影中心S共线的数学表达式
(4)
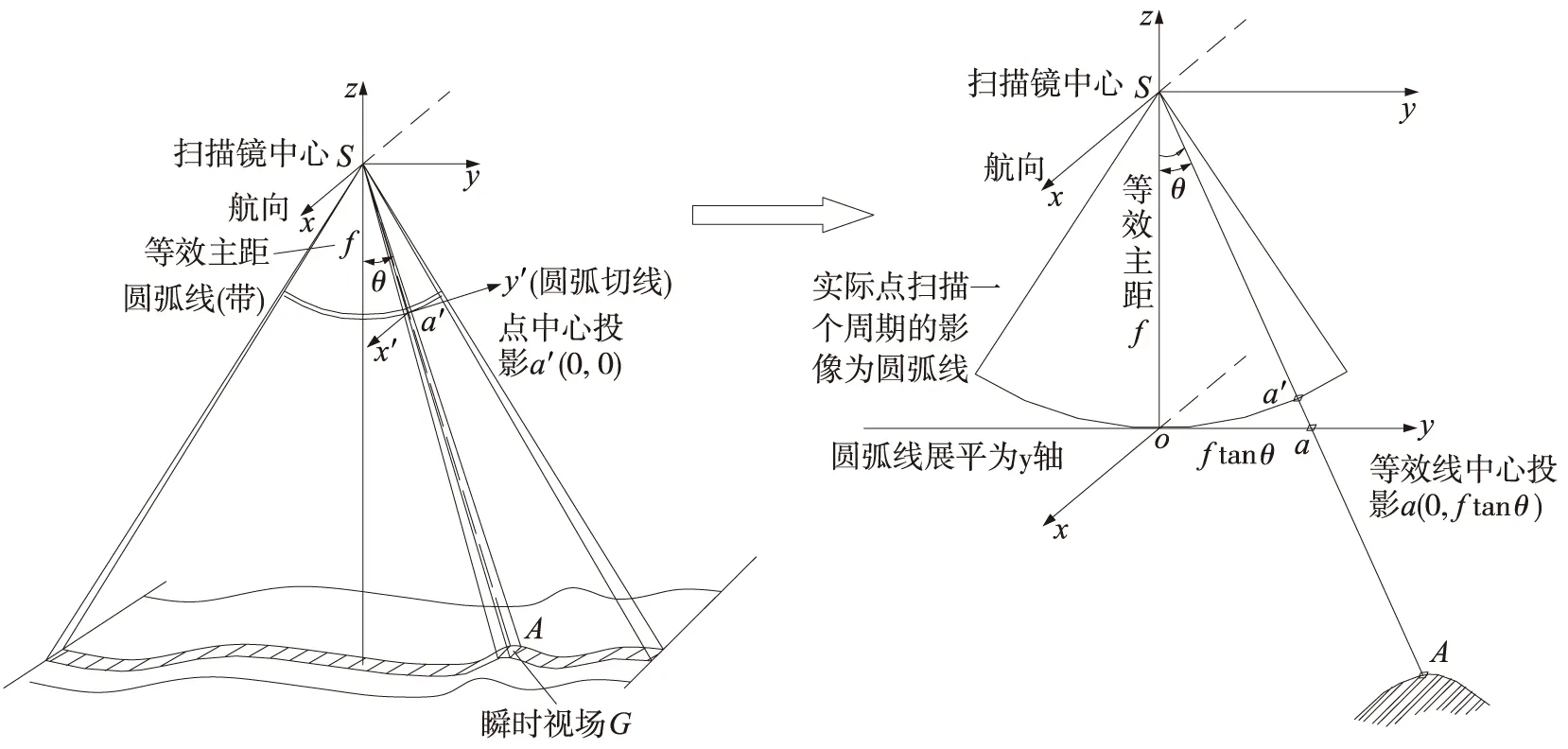
图7 点扫描成像
在2.2中提到的成像光谱仪,还有一种类型是点扫描方式(如图8)。该类型的成像光谱仪利用点探测器收集光谱信息(共线方程式(4)适用),经色散元件后分成不同的波段,分别成像于线阵列探测器的不同元件上,通过点扫描镜在垂直于轨道方向的面内摆动以及沿轨道方向的运动完成空间扫描,而利用线探测器完成光谱扫描。
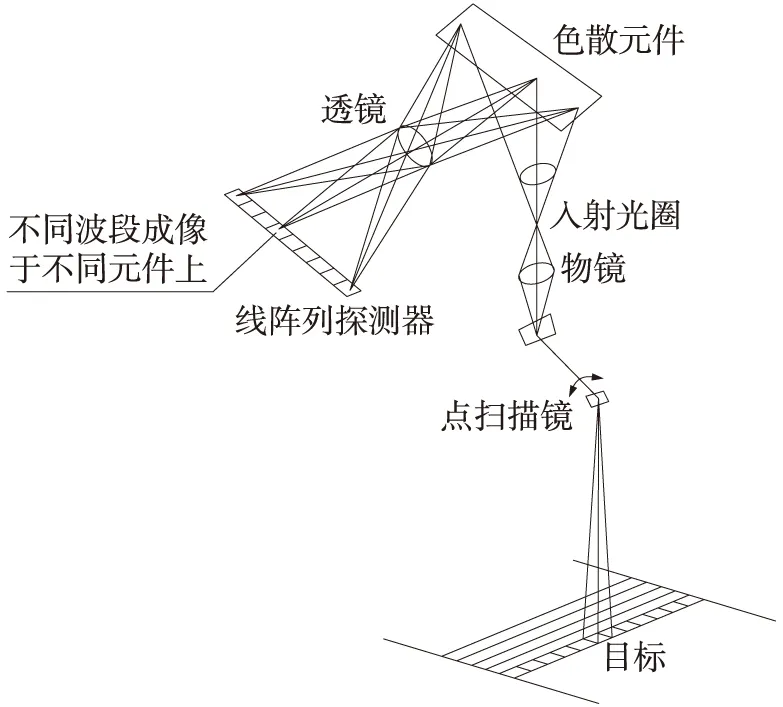
图8 带线阵的成像光谱仪
点扫描成像的各类传感器(红外扫描仪、多光谱扫描仪、带线阵的成像光谱仪)属于光电成像类型。工作波段包括紫外、可见光和红外等部分,在宇宙飞船“天空实验室”上S192多光谱扫描仪采用了13通道(可同时获取目标物的13个波段图像)连续波段,波长0.41~12.55 μm。
3 结 论
综上所述,分析成像的几何关系可知:
①面中心投影框幅影像,中心投影瞬间为一张像片,像片上各点坐标随构像位置不同而不同,像片的空间姿态由外方位角元素φωκ确定,一条航线上每张像片的姿态角φωκ各不相同。
②线中心投影缝隙影像,中心投影瞬间为一条缝隙,缝隙上各点坐标随构像位置不同而不同,但x始终为0,缝隙的空间姿态由外方位角元素φωκ确定,一条航线上每条缝隙的姿态角φωκ各不相同。
③线中心投影缝隙周期摇摆柱面影像,中心投影瞬间为一条缝隙,缝隙上各点坐标随构像位置不同而不同,但y始终为0,缝隙的空间姿态由外方位角元素φωκ确定,在一个摆动周期内每条缝隙的姿态角φωκ各不相同。由于得到的是柱面影像,须展平后才能对照写出共线方程。
④点中心投影周期转动圆弧线影像,中心投影瞬间为一个像元素影像,在一个摆动周期内每个像元素的姿态角φωκ各不相同。该像元素就是影像坐标系原点,所以x和y都为0,在一个摆动周期内影像坐标系原点构成一条弧线影像,须展平后才能对照写出共线方程。所有共线方程式等号左边的像点坐标随传感器类型不同而不同,等号右边是一样的,但要注意方向余弦aibici(i=1,2,3)是φωκ的函数,所以在用共线方程解决具体问题时,除了2.1面中心投影框幅式影像之外,其他几种情况针对不同的传感器其数据处理和应用将复杂得多。
[1]李德仁,周月琴,金为铣.摄影测量与遥感概论[M].北京:测绘出版社,2001
[2]方子岩,郑天赐.线阵列传感器影像三维信息提取技术[J].测绘通报,2009(增刊)
猜你喜欢
航天返回与遥感(2022年2期)2022-05-12
新高考·高一数学(2022年3期)2022-04-28
中等数学(2021年4期)2021-08-14
中学生数理化·高一版(2021年5期)2021-07-21
边疆文学(2020年5期)2020-11-12
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02
制导与引信(2016年3期)2016-03-20
西藏科技(2015年4期)2015-09-26
语文教学与研究(2014年10期)2014-02-28
