HMR3000数字罗经在矢量传感器被动测向浮标中的应用*
2011-06-06 10:06孙昕陆扬
舰船电子工程 2011年12期
孙 昕 陆 扬
(91439部队96分队 大连 116041)
1 引言
HMR3000数字罗经是美国Honeywell公司生产的一款集航向、俯仰和横滚三个旋转量测量于一体的磁敏传感器,它具有精度高、体积小、功耗低等特点,可方便地集成在一体化小型系统中,在微型飞行器控制、机器人控制以及航海、通信、测量等领域具有广泛的应用[1~4]。在基于矢量传感器被动测向原理的矢量传感器被动测向浮标中,采用HMR3000数字罗经与矢量传感器封装一体,将矢量传感器测得的目标方位转换为真北方位(大地坐标中的方位),便于测向误差修正,从而提高了矢量传感器的测向精度,满足水下目标高精度方位估计需要;同时罗经数据还可作为测向浮标姿态监控信息。
2 系统硬件设计
2.1 总体结构
HMR3000数字罗经在矢量传感器被动测向浮标中应用主要是依据罗经数据对矢量测向结果加以修正,给出目标的真方位;在系统设计中,采用MSP430系列单片机完成对数字罗经的输出信号进行管理,把数字罗经的信号通过RS232串口读入单片机;并对辅舱电源电压进行实时监控;将罗经信息通过单片机的异步串口以RS-232方式上传给通信管理板(嵌入式控制单元);通信管理板将数字罗经的航向信息、姿态信息以及深度信息、浮标GPS定位信息与矢量信号处理单元的数据,通过以太网控制器和无线通信模块实现与基站通信,上传数据和结果,下达指令。具体系统结构(仅包含HMR3000数字罗经结构单元)如图1所示。

图1 浮标系统的数字罗经系统结构
2.2 HMR3000功能模块
HMR3000数字罗经集三个轴向的转动角度测量功能于一体,由三轴磁阻传感器和一个充有液体的两轴倾斜传感器组成,可以得到进行倾斜补偿后的航向数据和姿态数据。该产品测量方位精度达0.5°,方位分辨率为0.1°;姿态精度达±0.4°,姿态测量分辨率为0.1°;最大姿态测量范围±40°;工作温度-20℃~+70℃;供电电压为6~15V。HMR3000通信遵循NMEA(National Marine E-lectric Association.国家海军电子协会)0183标准,可使用RS-232或RS-485接口。其数据ASCII码字符为10位(1位起始位、8位数据位、1位停止位,无奇偶校验位),传输波特率1200、2400、4800、9600、19200bit/s可选,更新模式在连续选通的状态下,更新率为20Hz[5]。
2.3 器件选型
2.3.1 数字采集及接口转换单片机
MSP430是TI公司近几年推出的16位系列单片机,采用了最新低功耗技术。MSP430F169工作在1.8~3.6V电压下,有正常工作模式(AM)和四种 低 功 耗 工 作 模 式 (LPM1、LPM2、LPM3、LPM4),并可在各种工作模式之间切换。此外,MSP430F169单片机集成了多通道12bit的A/D转换、片内精密比较器、多个具有PWM功能的定时器、斜边A/D转换、片内USART、看门狗定时器、片内数控振荡器(DCO)、大量的I/O端口以及大容量的片内存储器,可以满足绝大多数的应用需
要[6~8]。
MSP430F169的主要特性是:
·工作电压:1.8V~3.6V。
·超低功耗:活动模式:280μA,at 1MHz,2.2V,待机模式:1.6μA。
·16位RISC结构,125ns指令周期。
·12位ADC采样带保持。
·串行通讯USART0、USART1接口。
·60KB+256Bflash存储器2KB RAM。
2.3.2 RS232转换
MSP430F169单片机输出是TTL信号,方位姿态仪传送的是RS232接口信号。RS232接口的电气特性是任何一条信号线的电压均为负逻辑关系。即:逻辑“1”:-5~-15V;逻辑“0”:+5~+15V。噪声容限为2V。即要求接收器能识别低至+3V的信号作为逻辑“0”,高到-3V的信号作为逻辑“1”。可以看出RS232接口电压和TTL接口电压不匹配,不能直接连接,需一个接口转化电路。需把TTL信号转变成RS232信号再传送[9],本系统选用转换芯片是SP3232E。
TTL和RS232转换芯片SP3232E内有一个高效的电荷泵,工作电压为3.3V时只需0.1μF电容就可进行操作。电荷泵允许SP3232E在+3.3V~+5.0V内的电压范围内发送符合RS-232的信号。SP3232E是一个2驱动器/2接收器的器件。它包含一种低功耗关断模式,该模式下器件的驱动器输出和电荷泵被禁止。关断状态下,电源电流低于1μA。图2是SP3232E典型应用电路图。
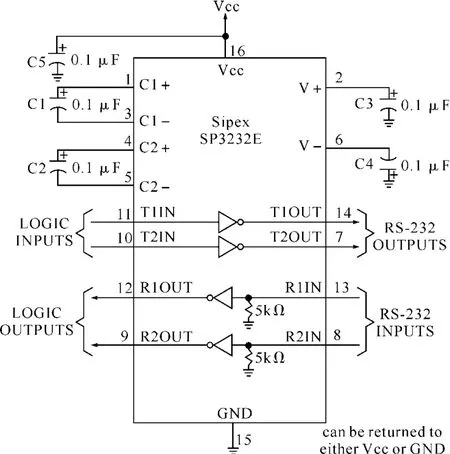
图2 SP3232E典型应用电路图
2.3.3 其它单元
上位机由一片ARM S3C2440A作为通信管理板的中心控制单元,系统选用三星公司的S3C2440A,它是ARM920T系列CPU,采用0.18μm工艺的CMOS设计,主频最高可达266MHz,特别适用于低功耗场合。主要负责通信板的控制和数据传输(包括:矢量传感器数据、罗经信息、深度信息、GPS数据等)。考虑到开发周期和可靠性等因素,选用核心开发板Nano2440。其自带32MB SDRAM和64MB FLASH作为程序和数据存储器;共有三个UART接口,一个通过232转换芯片MAX3221转为RS232标准与单片机相连,用于传输数字罗经和深度传感器的数据。由于S3C2440A片上不带以太网控制器,为了进行网络通信,必须外接以太网控制芯片。设计中采用CS8900A作为以太网控制器。CS8900A主要为嵌入式应用系统、便携式产品和某些适配卡等提供一种切实可行的以太网解决方案。2440A通过总线与CS8900A相连,拓展一个10M的以太网接口与无线通信模块连接,完成浮标数据与基站的通信。
3 系统软件设计
3.1 HMR3000的指令格式
HMR3000的串行通信是遵循NMEA0183标准制定的简单、异步的ASCII协议,其发出或接收的每一条指令包含一个两字符'hh'作为结尾,以保证发送数据的准确性;其输出指令有六种格式(标准输出格式为HDG、HDT、XDR,专用输出格式为HPR、RCD、CCD三种格式),在矢量传感器被动测向浮标中,数字罗经输出量为用于测向误差修正的航向数据,以及用于浮标姿态测量的俯仰数据、横滚数据这三个测量值,因此,输出指令格式选用HPR格式。系统所采用的控制指令及输出指令为表1所示。

表1 HMR3000控制、输出指令
3.2 系统程序流程
系统软件设计包括两方面,一是单片机对HMR3000串口数据的接收、整理、及存储在单片机内部RAM中[10],另一是上位机对单片机的串口数据的读取、与其它信息整合处理并发送,图3和图4为相关程序流程。
4 矢量测向误差修正
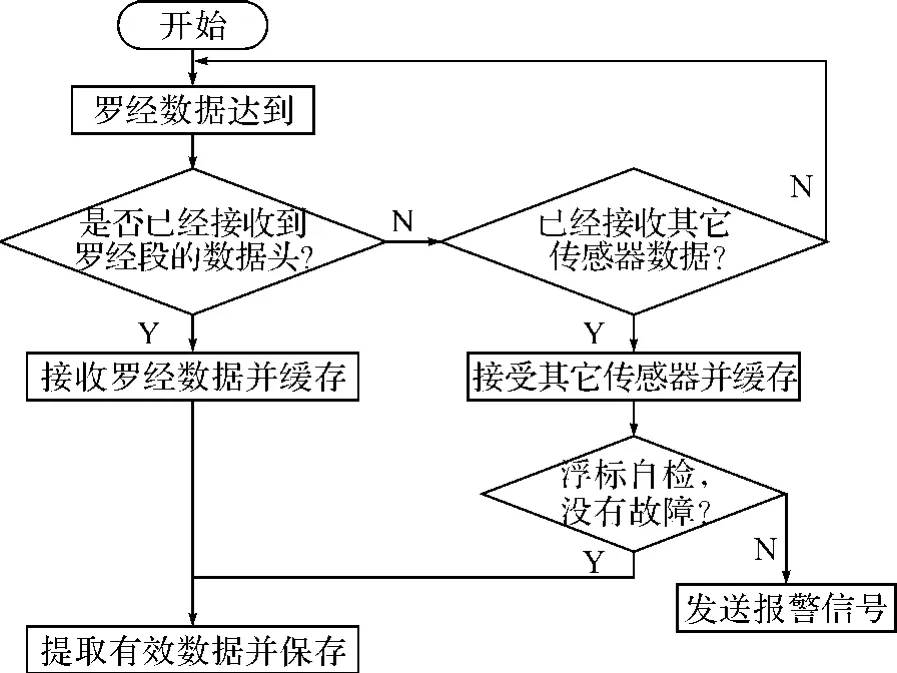
图4 通信管理板接收罗经数据程序流程
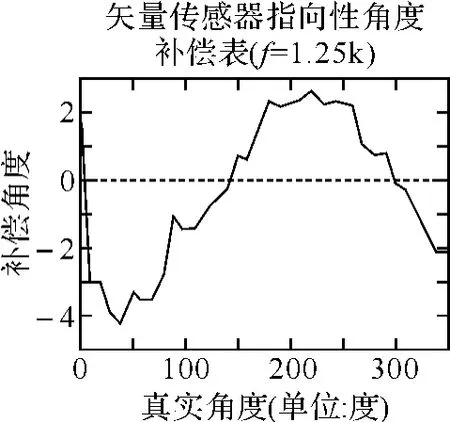
图5 矢量传感器测向工程误差修正补偿图
为了消除矢量测向工程误差,将矢量传感器测得的目标方位依据数字罗经的数据对测向结果加以修正,给出目标真方位。系统进行测向误差校准时,目标船载声源低速绕测量浮标以较大半径(≥1.5km)逆时针航行一周,目标声源处刚性连接DGPS的数据作为目标真实方位坐标,数据处理基站对矢量测向数据、罗经航向数据以及目标的GPS数据结果进行处理分析,给出测量浮标矢量测向误差角度补偿值。图5为系统校准时所获矢量传感器测向工程误差修正补偿图,利用该图对矢量传感器的Vx,Vy通道的指向性进行误差修正补偿,图6、图7为补偿前后的指向性对比图,指向性有较为明显的改善。

图6 Vx通道角度补偿前后的指向性对比图

图7 Vy通道角度补偿前后的指向性对比图
5 结语
在本文设计的矢量传感器被动测向浮标中,采用HMR3000数字罗经与矢量传感器封装一体的集成方式,采用MSP430F149单片机作为下位机实现与数字罗经的串口通信,通过管理板将数字罗经、矢量传感器等数据进行整合、压缩,加密传输到岸基显控系统进行处理,解决了矢量传感器被动测向误差修正问题。将矢量传感器测得的目标方位经过数字罗经航向修正后,系统测向精度得到提高,整个系统具有精度高,功耗低,结构简单,性能稳定的特点,满足水声测控装备小型化需要,在水下目标探测、预警等领域具有较好的应用前景。
[1]王养柱,王强华,崔中兴.新型数字罗经在空投鱼雷内测记录系统中的应用[J].传感器技术,1999;18(3):43~51
[2]文方,黄钱飞.HMR3000在机器人姿态自控系统上的应用[J].自动化技术与应用,2010,29(6):27~32
[3]张鹏,杨坤德,刘艳,等.数字微波式远程水声数据采集系统设计[J].计算机测量与控制,2009,17(7):1421~1423
[4]陈皓生,徐军.HMR3000数字罗盘在微型飞行器中的应用[J].传感器技术,2001,20(9):44~46
[5]HMR 3000Digital Compass Module User's Guide,Rev.B 2001,3
[6]刘存根,李婧瑜,张锐,等.基于 MSP430F169的电缆管道牵引机器人系统设计[J].电子设计工程,2009,17(5):102~106
[7]林毓梁,张锐,王伟.基于 MSP430F169的深海环境数据采集系统设计[J].电子设计工程,2011,19(3):71~73
[8]姜晓,殳国华.基于 MSP430单片机的深水监测装置[J].微计算机信息(嵌入式与 SOC),2009,25(8-2):69~70
[9]秦龙.MSP430单片机应用系统开发典型实例[M].北京:中国电力出版社,2005:60~64
[10]求是科技.单片机典型模块设计实例导航[M].第2版.北京:人民邮电出版社,2008,7:166~183
猜你喜欢
垂钓(2022年3期)2022-05-14
垂钓(2022年1期)2022-02-09
幼儿园(2021年12期)2021-11-06
舰船电子工程(2021年5期)2021-06-04
世界海运(2021年3期)2021-03-30
船海工程(2021年1期)2021-03-02
中国船检(2020年10期)2020-11-07
垂钓(2019年2期)2019-09-10
火控雷达技术(2016年2期)2016-02-06
小学生时代·大嘴英语(2015年7期)2015-11-23