
缸内压力原始测量信号的处理方法*
2011-06-06 10:06:00林瑞霖
舰船电子工程 2011年10期
刘 琦 林瑞霖
(海军工程大学船舶与动力学院 武汉 430033)
1 引言
柴油机的缸内压力直接反映柴油机的工作性能,包括进气过程的好坏、喷油定时是否准确、气阀间隙是否合适、气缸的气密性的好坏、燃料燃烧的完整程度等[1]。因此,测取压力信号可以对柴油机的工作状态进行检测。通过缸内压力信号对柴油机进行故障诊断,主要是通过从缸内压力信号中提取出缸内温度、压力升高率、燃烧放热率等随曲轴转角的变化规律[2]。但是,通过压力传感器测取的原始缸内压力信号是混有很多噪声的电压信号,能否有效地从中提取出随曲轴转角变化的比较光滑的压力信号,对判断柴油机工作是否正常和诊断柴油机的故障类型至关重要。
2 对原始测量信号处理的流程
1)等曲轴转角化
对压力信号的采样是通过压力传感器所采集的等时间间隔的信号,而对柴油机工作状态的分析是通过等曲轴转角的压力信号实现的[3],所以,必须对等时间间隔采样的信号进行等曲轴转角处理。压力传感器在柴油机曲轴的各个轮齿转动过程中所采集的信号个数为

其中,Z为柴油机曲轴一圈轮齿的个数;fs为压力传感器的采样频率;ni为曲轴在经过不同轮齿时的瞬时转速;x(Zi)为不同轮齿时压力传感器所采集的信号个数。
根据各个轮齿间采样点的信号,通过Newten插值公式求出等曲轴转角的压力传感器信号,Newten插值算法如下[4]:

采集信号的精度取决于压力传感器的频率和柴油机转速,转速越低,采样频率越高,信号的准度越高。
2)多循环平均
柴油机的做功过程是通过燃料的燃烧产生高温高压气体,推动活塞做功。对于四冲程柴油机,每一个做功循环都经历吸气、压缩、燃烧做功和排气冲程,根据这个顺序周而复始地进行工作,每个工作循环都经历度曲轴转角[5]。即使在稳定工况下,柴油机工作中的各个不同循环,缸内压力信号也会出现波动[6]。因此,为了减小随机误差和噪声干扰,必须对测取的缸内压力信号进行多循环平均。多循环平均的算法如下:其中,θ为曲轴转角;Vi(θ)为随曲轴转角变化的压力传感器信号;N为循环数;¯V(θ)为平均化处理后的压力传感器信号。

3)标定
压力传感器输出的是电压信号,而要得到缸内压力信号,需要对压力传感器进行标定,根据标定结果,将采集的电压信号转化为压力信号。压力传感器的输出信号随压力的大小呈线性变化,利用最小二乘法对压力传感器进行标定,标定算法为,设

求满足

的α、b,其中α、b分别为压力传感器的放大倍数和零点漂移,V、P(V)分别为压力传感器输出的电压信号和所要得出的缸内压力信号。
4)光顺处理
压力传感器采集的缸内压力信号之中混有很多高频的噪声干扰,即使进行了多个循环的平均,压力信号的毛刺依然很大;计算放热率要求P-θ曲线是可导的,但是由于压力值采集误差,以及其他误差等原因,常常使压力数据并不满足可导的条件。由于以上原因,用数学方法计算的dQ-dθ曲线一般会产生较大的震荡[7]。所以,必须将平均化以后的压力信号进行光顺处理。
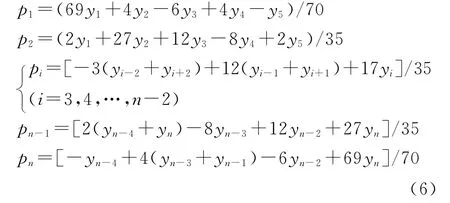
光顺处理的方法很多,可采用样条函数、最小二乘法、正交多项式法、五点三次平滑法等。五点三次平滑法的算法如下[8]:
以上即为对压力传感器所采集的原始信号的处理流程。
3 实验平台介绍
本实验是在6135非增压四冲程柴油机上进行的,转速置为1000r/min,负载400Nm,6135柴油机 的 发 火 顺 序 为 1-5-3-6-2-4,压 力 传 感 器 采 用HEM375耐高温压力传感器,采样频率为65536Hz,实验采集了2号缸40个循环的压力信号进行分析。
4 数据分析
1)在转速1000r/min,负载400Nm的工况下,采集的40个循环的缸内压力原始数据和单个循环的缸内压力原始数据分别如图1和图2。从图1可以看出,即使在稳定工况下,各个不同循环的缸内压力信号波动依然很大,其中最高爆发压力的波动达到31.6%。单缸的缸内压力信号在不同做功阶段受噪声干扰均比较大,其中以低压段的表现最为明显,如图2,这主要由于高压段压力信号占主导,而低压段噪声信号的比例相对高压段高。
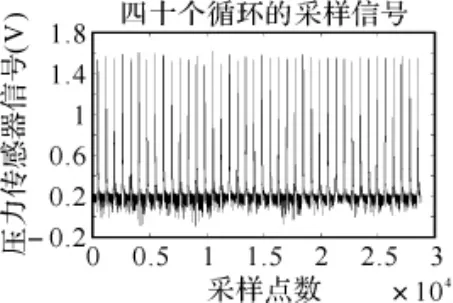
图1 40个循环的缸内压力信号
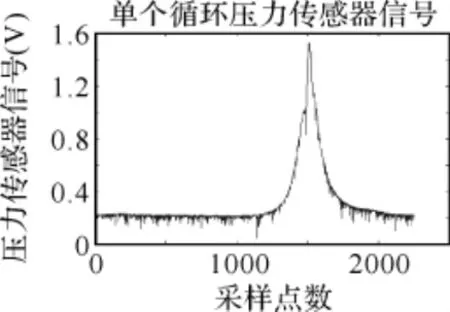
图2 单个循环的缸内压力信号
2)按照等曲轴转角化的算法,将等采样频率的压力传感器信号转化为等曲轴转角的信号,结果如图3,可以看出,经过等曲轴转角化后,更加能清楚地反映柴油机在不同做功阶段的压力变化规律。
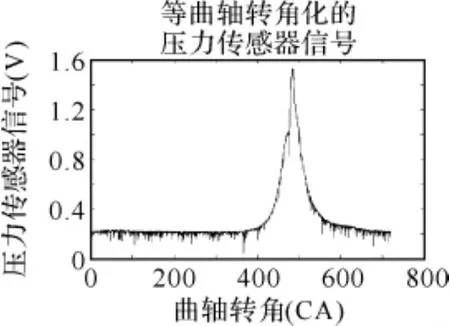
图3 等曲轴转角化的压力传感器信号

图4 40个循环平均的压力传感器信号
3)按照多循环平均算法,对40个循环的压力传感器信号作平均化处理,结果如图4,可以看出,经过多循环平均处理后,信号的随机误差明显减小,信号相对平滑。
4)按照光顺算法,分别对平均化以后的压力传感器信号进行一次、二次、三次光顺处理,如图5。可以看到,随着光顺次数的增加,信号越来越平滑[9],但是三次光顺以后,信号在低压段(包括压缩段)的噪声干扰仍然很大。为有效减少信号在低压段的噪声干扰,对信号进行六次光顺,信号在低压和高压段均比较平滑,但却使信号的一些特征点不明显,如压缩拐点消失,信号的峰值误差也加大,信号的峰值压力误差达到5%,如图5。针对压力信号在高压段有用信号占主导,而在低压段噪声干扰大的特点,本文选择对高压段和低压段分别采用三次光顺和六次光顺的方法进行处理,结果如图6,可以看到,处理后的结果既保持了原始信号的特征点,又使峰值的误差比较小,峰值压力误差为0.88%。

图5 不同光顺次数的缸内压力信号对比
5)按照最小二乘算法,对压力传感器进行标定。所采用的标定点如表1。
最小二乘法标定曲线如图7,由图可见,压力传感器的线性度比较好,标定的结果为,
P(V)=5.2193V+1.0238 (7)
利用式(7)的标定结果,对压力传感器所测量的压力信号进行标定,得到最终的缸内压力随曲轴转角变化的结果,如图8所示。
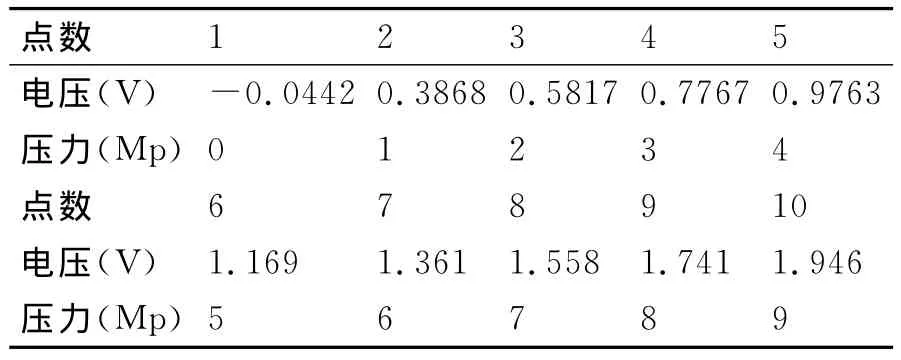
表1 标定点的选取

图6 分段光顺的缸内压力信号
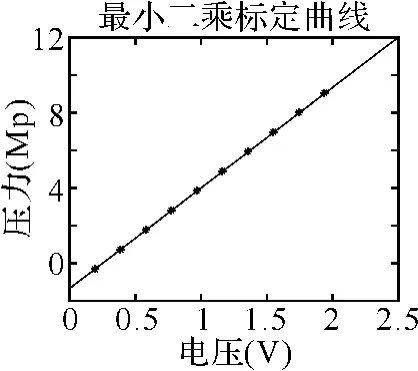
图7 最小二乘法标定曲线
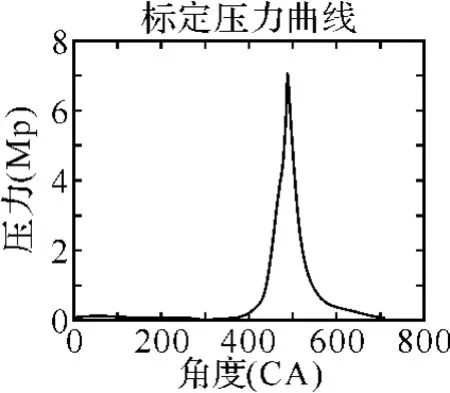
图8 压力曲线标定结果
6)本文对比了不同光顺方法对压力升高率计算的影响,如图9,可以看出,压力信号未经过光顺处理,得出的压力升高率曲线毛刺比较大[10],经过五点三次光顺后,压力升高率曲线高压段毛刺较小,而低压段毛刺依然很大,分段光顺后,以压缩终点为零度转角,计算的缸内压力升高率曲线在低压和高压段均比较平滑,并且根据分段光顺的压力曲线,由理想气体状态方程计算的压缩段缸内温度曲线也比较平滑。
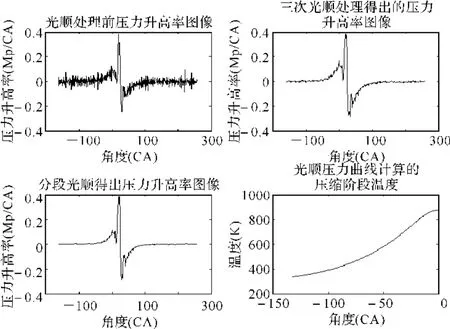
图9 不同光顺方法对压力升高率计算的影响以及根据分段光顺压力计算的压缩阶段温度
5 结语
1)对压力传感器测量的原始缸内压力信号经过等曲轴转角化、多循环平均、光顺处理和标定以后,可以得到满足故障诊断需要的缸内压力数据。
2)采用分段光顺方法对压力数据进行处理可以使压力曲线在高压和低压段均比较平滑,而且保持了压力曲线的特征点,减小了峰值误差。
[1]郭江华,侯馨文,陈国钧,等.船舶柴油机故障诊断技术研究[J].中国航海,2005(4):75
[2]黄碧华,裘崇伟,谢友柏.柴油机磨损状态监测及故障诊断专家系统知识库建立的研究[J].摩擦学学报,1994,45:36
[3]潘峰.船舶主推进柴油机示功图识别专家系统的研究[D].武汉理工大学硕士学位论文,2007(5):15
[4]何汉林,梅家斌.数值分析[M].北京:科学出版社,2007(2):130
[5]周龙宝,高宗英.内燃机学[M].北京:机械工业出版社,2009(2):16
[6]林瑞霖,孙云岭.基于瞬时转速相关分析的柴油机工作均匀性检验[J].内燃机,2006,8(4):19
[7]曹国豪.船舶柴油机示功图测量系统研制[D].武汉理工大学硕士学位论文,2009(5):6
[8]孙怡,潜伟建,夏志澜,等.在柴油机放热曲线计算中两个关键问题的解决方法[J].海军工程大学学报,2001,6(13):86
[9]叶剑.135柴油机燃烧过程数值模拟[D].大连理工大学硕士学位论文,2008(12):32
[10]Ryuichi Kimura,Noboru Nakai,Hiroshi Mizutani.Diagnostic System of Diesel Engine by Statistical Vibration Analysis[R].Bulletin of the M.E.S.J,1966,24(1):14~20
猜你喜欢
装备制造技术(2019年12期)2019-12-25 03:07:50
制造技术与机床(2019年8期)2019-09-03 01:14:32
制造技术与机床(2019年4期)2019-04-04 12:21:34
北京汽车(2018年6期)2019-01-03 11:27:38
制造技术与机床(2017年5期)2018-01-19 02:48:53
船舶标准化工程师(2017年2期)2017-04-05 08:42:56
计算机工程(2015年4期)2015-07-05 08:27:42
汽车与新动力(2013年4期)2013-03-11 16:08:06
科技创新导报(2012年8期)2012-04-29 13:06:11
汽车与新动力(2012年1期)2012-03-25 10:09:25
