向家坝升船机工程高精度平面控制网设计研究
2011-06-05 04:38李宗春张冠宇李东明
水利与建筑工程学报 2011年5期
李宗春,李 干,2,张冠宇,李东明
(1.信息工程大学测绘学院,河南 郑州 450052;2.72946部队,山东 淄博 255020;3.水利部水工金属结构质量检验测试中心,河南 郑州 450006)
工程控制网是工程项目的空间位置参考框架,是针对某项具体工程建设、测图、施工和管理的需要,在一定区域内布设的平面和高程控制网[1-2]。向家坝升船机是向家坝水电站的永久通航设施,其在整个向家坝水利工程中属于一个复杂大型建筑物。这类工程的高精度控制网包括施工控制网和变形监测网,又分为平面控制网和高程控制网。高精度体现在相邻点的点位中误差和网中最弱点的点位中误差达到毫米级甚至亚毫米级[2]。
某测量机构已为向家坝水利枢纽工程布设了施工控制网,控制网等级为二等,主要用于整个枢纽工程建设的施工控制。但升船机工程靠近向家坝枢纽左岸,由于遮挡和距离较远等原因,现有控制网点不能满足升船机土建施工、设备安装以及变形监测的需要,需要专门为升船机建立高精度专用控制网。在此情况下,本文主要讨论升船机高精度平面控制网的布设。
1 向家坝升船机工程概况
向家坝水利枢纽工程位于云南省水富县(右岸)和四川省宜宾县(左岸)境内,其中升船机工程位于枢纽左岸,其中心线与坝轴线交角90°,左、右分别与冲沙孔坝段和厂房坝段相邻,由上游引航道、上闸首(包括挡水坝段和渡槽段)、船厢室、下闸首和下游引航道(包括辅助闸室和辅助闸首)等5部分组成,全长约1530 m,其中船厢室为主要工程,长116.00 m,宽19.00 m,高 153.00 m,底板高程255.00 m。图 1为该枢纽工程的平面布局图和现有控制网点分布图,由于受到二期纵向围堰遮挡,在升船机高程255.00 m平面处(升船机船厢室底部),坝左岸能看见2个现有网点,但垂直角过大;坝右岸能看见5个现有网点,但距离均超过600 m,因此,现有控制网点不能满足需求。

图1 向家坝升船机工程概况
2 向家坝升船机平面控制网设计
升船机主体工程属于超高建筑,工程宏大、设备繁多、技术复杂,各种埋件以及设备的安装定位要求高,不宜布设统一的三维控制网,因此将高程控制网和平面控制网分开布设[3]。为了进行研究,阐述了传统布设方案,分析了传统方案的不足,在此基础上提出基于施工坐标系的新布设方案。
2.1 传统布设方案
根据控制网层与级的概念,分两层布设平面控制网[4]。基本步骤为:首先,在升船机船厢室大底板上布设2~3个点,将其与右岸通视的稳定控制点组成全站仪边角网作为第一层控制网;其次,以首级控制网得到的大底板上的2~3个点为起算数据,在大底板上布设一定数量的点组成全站仪边角网作为第二层控制网,指导施工控制、设备安装;定期复测第一层控制网修正大底板上的网点变形,相当于一直以外部控制点指导施工控制、设备安装。这里,第一层控制网只为第二层控制网传递必要的起算数据,并不在精度上控制第二层控制网,相当于将第二层控制网“挂”到第一层控制网上。
由于升船机在施工过程中不可避免要产生变形,船厢室大底板上的控制网点会发生位移,传统方案在定期复测第一层控制网时,用外部稳定点修正大底板上的网点,这样看似整个施工过程由外部稳定控制点控制,但整个升船机各段的施工参考基准随着大底板上控制网点的位移发生了变化,整个工程的参考基准并不统一,这就降低了控制精度,特别当大底板上控制网点的位移较大时,会给工程带来一定安全隐患。
2.2 基于施工坐标系的布设方案
定义升船机施工坐标系,在其基础上布设平面控制网。基本步骤为:首先,根据现有控制网点,复现升船机施工平面坐标系;其次,在升船机施工平面坐标系下布设平面控制网;同时,在施工过程中定期复测和联测升船机的平面控制网,保证整个工程的施工基准统一于升船机施工平面坐标系。
2.2.1 施工坐标系的定义
升船机工程在向家坝水利枢纽工程中属于一个相对独立的大型建筑物,在建造过程中有其独立施工坐标系。如图2所示,定义平面坐标系原点O位于大底板左下角,X轴与坝轴线垂直且与船厢室大底板的F轴线平行,指向下游方向为正,Y轴与坝轴线平行,指向左岸方向为正,构成平面直角坐标系;定义Z轴沿铅垂方向,垂直向上为正,零点位于升船机高程255.00 m平面内。
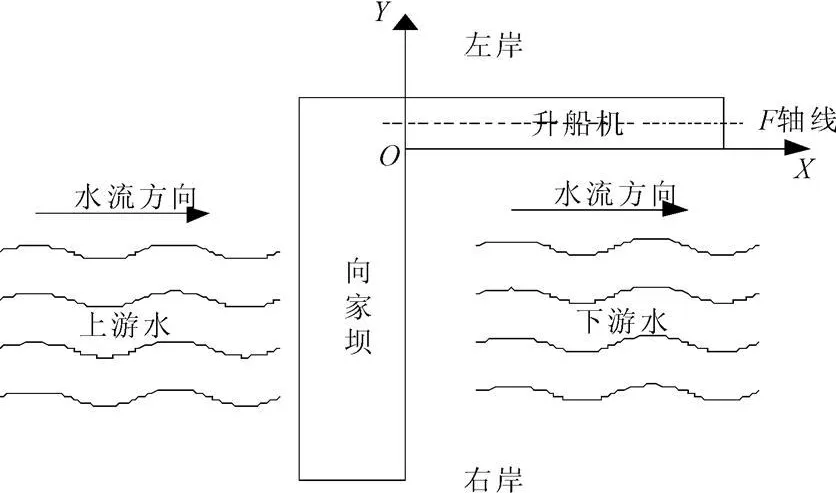
图2 升船机平面坐标系示意
2.2.2 施工平面坐标系的复现
施工平面坐标系的复现核心思想:通过一点确定坐标系位置,通过一条边方位确定坐标系指向。如图3所示,根据观测条件和仪器的不同,本文设计有“一点一方向法”和“多点法”两种测量方案,“一点一方向法”方案:首先,根据设计参数在大底板中心位置粗放样控制点D1,将D1和右岸的稳定控制点(由于遮挡无法通视左岸的点,可只用右岸的稳定控制点),解算D1坐标,然后根据升船机设计参数,通过归化法精确调整D1到设计位置,即定位升船机坐标系;其次,在D1上通过方位测量(天文定向测量法或陀螺经纬仪测量法)确定坐标系的方向,以上过程就复现了升船机平面坐标系。
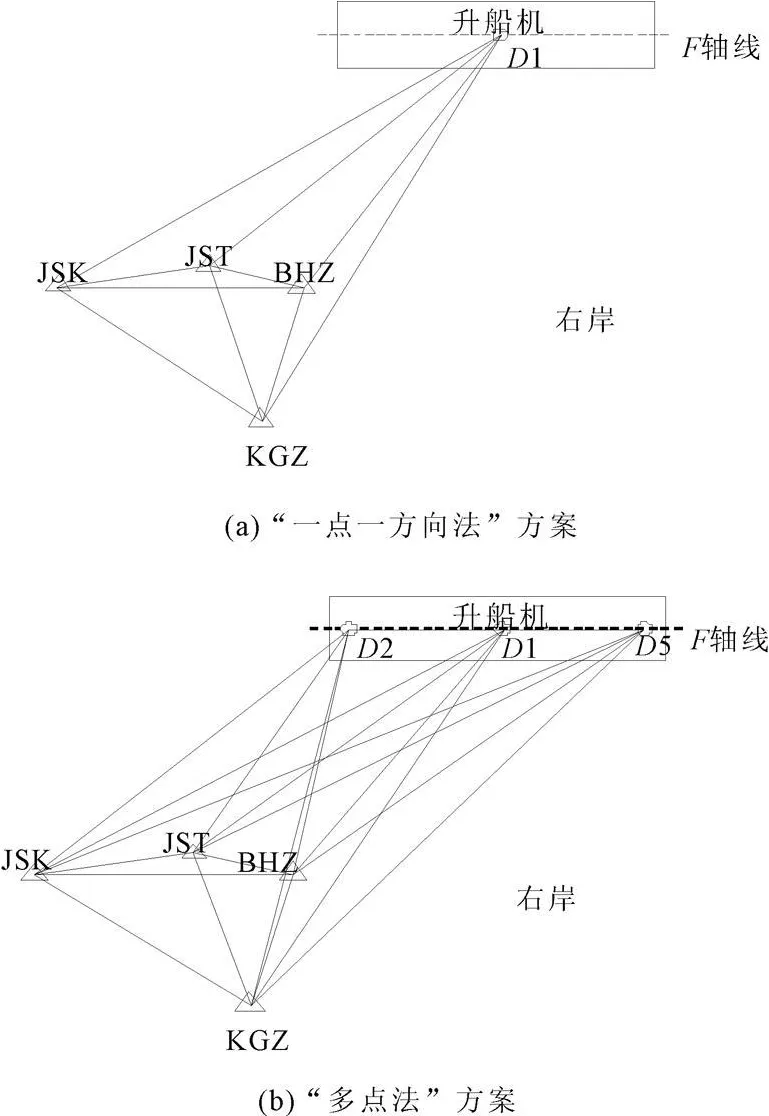
图3 升船机坐标系复现方案
“多点法”方案:以布设3点为例,在大底板中心布设D1点,F轴线两端布设D2、D5点,采用高精度全站仪,按边角网联测三个点与右岸的稳定控制点(由于遮挡无法通视左岸的点),解算D1、D2、D5坐标,然后根据升船机设计参数,通过归化法调整D1、D2、D5到设计位置 ,其中D2-D5边平行于 X轴,这样 D1、D2、D5三点就复现了升船机平面坐标系。
2.2.3 平面控制网布设
升船机坐标系的复现确定了升船机坐标系的绝对位置和方向。如图4所示,在 D1、D2、D5的基础上,放样其它网点,构成升船机平面控制网。将D1-D11与外部稳定点进行联测,联测结果作为升船机平面控制网的首期观测数据。

图4 升船机平面控制网
2.2.4 平面控制网的联测和复测
升船机平面控制网点位于船厢室大底板上,该区域会产生变形,需要定期与两岸稳定控制点进行联测,然后将定期联测结果与首期联测结果进行比较,观察控制网的整体变形,该过程类似于大坝的变形监测[5]。其中两个主要联测网为:①升船机船厢室高程达296.00 m时,下闸首建成,下闸首可通视左右岸的稳定控制点和D1~D11,将这些点组成边角网进行联测;②升船机船厢室高程达392.00 m时,上、下闸首均建成,上、下闸首可通视左右岸的稳定控制点和D1~D11,将这些点组成边角网进行联测。如果联测结果发现控制网整体变形超过安全值,说明整个工程存在安全隐患,反之,说明整个工程安全稳定。
平面控制网联测可以发现升船机专用控制网的整体变形,但不能精确反映网点内部的相对位置关系的变化,而升船机专用控制网要指导整个升船机的土建施工、部件安装及变形监测,其内部可靠性极其重要,因此需要定期对升船机平面控制网进行复测,用网内相对稳定的控制点修正变形较大的点,以保证升船机专用控制网各网点相对关系的现势性,并以每次复测并修正后的升船机专用控制网结果指导土建施工、部件安装以及变形监测。
以上过程保证整个施工过程都是在升船机设计坐标系下进行,至于设计坐标系的整体位移只要在安全指标范围内即可。
3 向家坝升船机平面控制网计算分析
根据向加坝升船机工程现场条件和已有控制点数据,模拟分析“基于施工坐标系的布设方案”。基于VC++平台设计了模拟观测值生成程序,根据实际测量能达到的精度,在模拟的理论观测值上加入服从正态分布的随机误差,从而生成了一组能反映实际观测精度的模拟观测值,采用“南方平差易2005平差软件”对模拟观测值进行平差计算[6]。
3.1 升船机坐标系的复现模拟计算
考虑到施工控制网部分边的边长较短,控制点间距离变化较大、高差大,实际观测中对中误差、调焦误差、垂直角误差引起的测边误差、测角误差较大,以及选择仪器的不同。按测角中误差、测距中误差为(3.2″,2.0mm)、(2.8″,1.5mm)、(2.5″,1.2mm)、(2.0″,1.0mm)四组不同测量精度分别进行模拟计算,结果见表1。
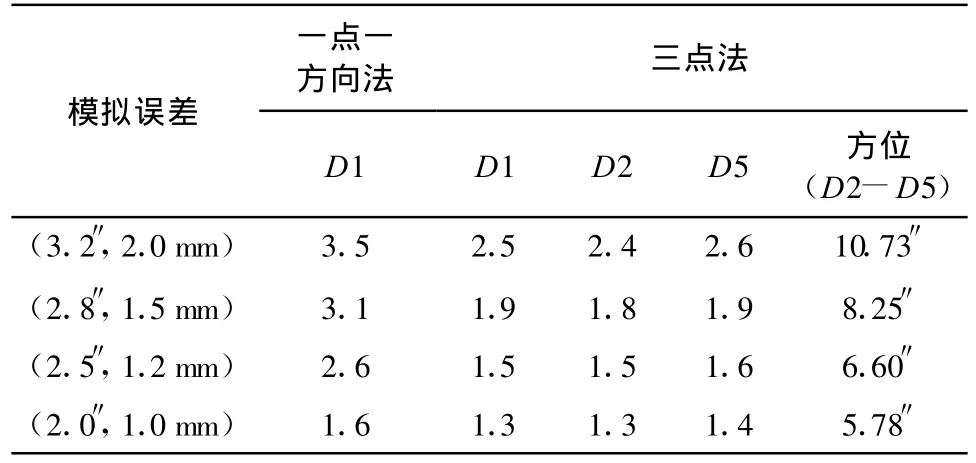
表1 升船机坐标系的复现模拟计算结果 单位:mm
表1结果表明:“一点一方向法”得到的D1点的点位精度为1.6mm~3.5mm;“三点法”的点位精度略优于“一点一方向法”,D2-D5边的方位精度约为6″~11″。“一点一方向”中采用陀螺经纬仪定向,定向精度可达5″[7]。对于升船机坐标系的复现,用于定位升船机位置的点(D1或D1、D2、D3)的点位精度对后期布设升船机施工控制网几乎无影响,其只反映整个升船机位置精度(表中精度均能满足要求);而升船机坐标系的方位精度要求较高,其用于保证升船机与坝主体垂直。因此在角度测量误差优于2.0″,距离测量误差优于1.0mm时,可认为两种方法精度相当;在角度测量误差大于2.0″,距离测量误差大于1.0mm时,“一点一方向法”优于“三点法”(主要考虑方位精度)。实际工程中应根据测量仪器和观测条件决定的测量误差以及工程精度要求选择合适的测量方法。
3.2 升船机平面控制网模拟计算
对图3的升船机平面控制网,点位分布均匀,距离较短,综合考虑目前高精度全站仪所能达到的测角和测距精度及野外测量条件,按测角中误差、测距中误差为(1.4″,1.0mm)进行模拟计算,以 D1、D2的坐标为起算数据,平差结果见表2,点位精度优于0.5mm。
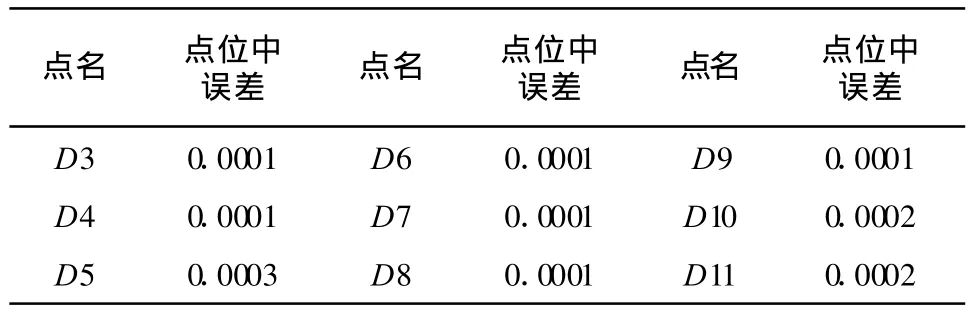
表2 升船机平面控制网平差结果 单位:m
3.3 升船机平面控制网复测模拟计算
升船机专用控制网的复测是为了发现控制网点的局部变形,用网内相对稳定的控制点修正变形较大的点,以保证升船机专用控制网各网点相对关系的现势性,提高控制网内部可靠性。
人为在D3、D7(随机挑选的点)理论值上分别加入1.2mm、1.8mm的模拟误差,按测角中误差、测距中误差为(1.4″,1.0mm)模拟一组新的观测值,相当于D3、D7产生局部位移,进行模拟计算。平差结果如表3,其中dX和dY为坐标平差值和理论值的较差,易发现D3,D7点的坐标偏差和人为加入的模拟误差值相当,前者稍大是由测量误差引起的,其它点的微小偏差也是由测量误差引起的。上述结果说明通过控制网的复测可以发现D3、D7点的位移,即能发现控制网点的局部变形。在实际测量过程中,对控制网进行拟稳平差,确定实际变形点,然后用稳定的控制点来维持坐标系的一致。
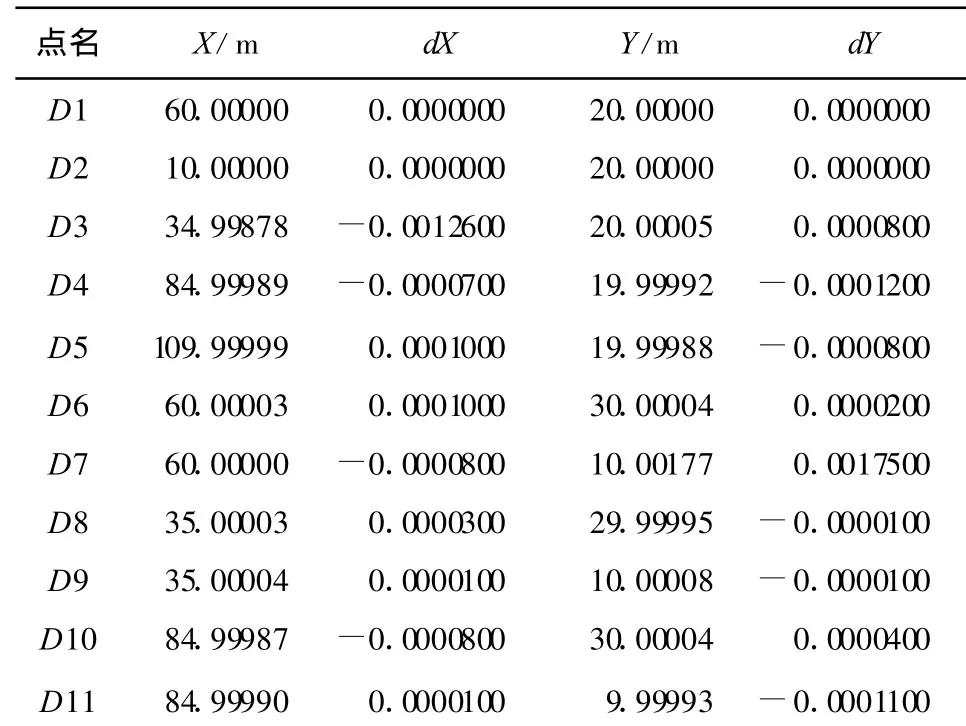
表3 升船机控制网点平面坐标及较差 单位:m
3.4 升船机平面控制网联测模拟计算
在255.00 m、296.00 m、382.00 m高程平面处,分别将升船机平面控制网点、两岸稳定控制点及上、下闸首点进行联测,分析升船机控制网的整体变形。
296.00 m、382.00 m高程平面处控制网联测时,在升船机平面控制网点上分别加入(σx=1.5mm,σy=4.0mm)、(σx=4.5mm,σy=5.0mm)的模拟位移(相当于升船机平面控制网发生整体位移),由于部分边较长,网中边长长短不一,按测角中误差、测距中误差为(2.5″,1.2mm)分别进行模拟计算,各网点坐标相对255.00 m高程平面处的差值见表4。
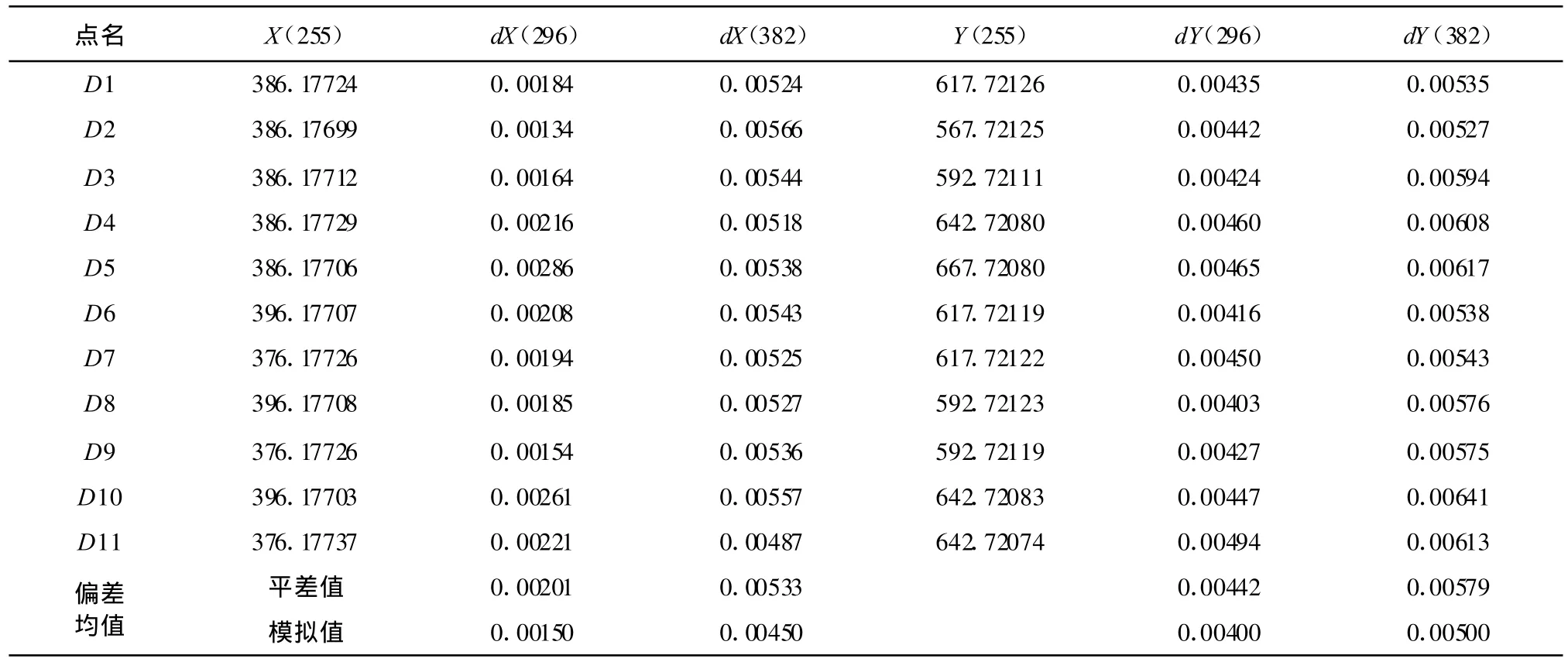
表4 升船机平面控制网联测结果 单位:m
结果显示,平差计算得到的坐标偏差与加入的模拟偏差值相当,前者稍大于后者是因为模拟值中含有测量误差,即说明控制网联测可以发现控制网的整体位移。在实际测量过程中,如发现整体变形在工程指标允许值内,说明工程安全稳定,反之,说明工程存在安全隐患。
值得说明的是,本文算例是在向家坝实际控制点位坐标基础上模拟生成理论观测值,并综合考虑测量仪器精度和野外作业条件,合理加入测量误差,进行模拟计算,其结果完全能反映实测达到的效果。
4 结 论
大型水利枢纽工程的高精度控制网的布设研究是工程的一项关键技术,其关系到工程的质量、施工进度、安全性等。通过对向家坝升船机高精度平面控制网布设进行研究和模拟计算分析,得出以下结论:
(1)大型复杂工程有独立的施工坐标系,整个工程施工控制网应建立在其独立的施工坐标系下,保证整个工程的施工过程采用统一的参考;
(2)如控制网点处于变形区域,需要定期将其与相对稳定点进行联测,观察控制网的整体变形,确保工程安全;
(3)控制网内部可靠性极其重要,需定期对控制网进行复测,发现控制网的局部变形,用网内相对稳定的控制点修正变形较大的点,以保证控制网各网点相对关系的现势性。
[1]宁津生,陈俊勇,李德仁,等.测绘学概论[M].武汉:武汉大学出版社,2004.
[2]张正禄主编.工程测量学[M].武汉大学出版社,2002.
[3]杨小平.大坝变形监测控制网布设及其基准控制点稳定性分析[J].水利与建筑工程学报,2010,8(2):130-132.
[4]张正禄,邓 勇,罗长林,等.大型水利枢纽工程高精度平面控制网设计研究—以向家坝为例[J].测绘通报,2007,(1):33-35.
[5]孙现申.论工测网的层与级[J].四川测绘,1995,18(1):23-26.
[6]范铀,夏玉平,陈一舞.平差易用户手册[M].PA2005,广东:南方测绘仪器公司,2005:10-19.
[7]DTM.Operator's Guide of GYROMAT 2000[Z].2004.
猜你喜欢
能源工程(2022年1期)2022-03-29
中国三峡(2017年1期)2017-06-09
中国三峡(2017年1期)2017-06-09
中国三峡(2017年1期)2017-06-09
中国塑料(2016年9期)2016-06-13
水电站机电技术(2014年6期)2014-09-26
火炸药学报(2014年3期)2014-03-20
中国三峡(2013年1期)2013-09-11
中国石油大学学报(自然科学版)(2013年6期)2013-03-11
中国三峡(2012年11期)2012-07-12