
船舶轴带发电—电动系统的原理及控制
2011-06-05 10:19孟永奇李保来兰建军
船电技术 2011年8期
孟永奇 李保来 兰建军
(1. 海军驻太原地区军代表室,太原 030027;2. 山西汾西重工有限责任公司北京研发中心, 北京 100097)
1 引言
通常船舶的动力系统和电力系统是两个独立的系统。动力系统是由船用主机、主轴、变速箱及推进螺旋桨等主要部件组成;电力系统通常是由数台柴油发电机组组成船舶电站,为全船的电气负载供电。这种船舶动力、电力系统的独立配置存在着以下问题:
其一,船用主机的额定功率是根据船舶的最大载重量和最大船速配置的,通常功率很大,车载重量较小、经济巡航、低速航行等工况下,往往船用主机的实际功率较小,长期处于轻载运行,这一方面造成大部分时间主机设备容量不能充分发挥利用,另一方面主机在轻载下运行的效率很低,造成能源浪费,另外柴油机长期在轻载下运行容易形成积碳,对柴油机的运行也会带来不利影响。
其二,由于动力和电力系统是两个独立的系统,一旦某一系统发生故障,不能相互支持作为备用能源,对全船的可靠性提高带来不利影响。一般船舶电站通常由数台柴油发电机组组成,具有冗余设计,一旦某台电站组发生故障,可以启动备用机组运行,不会对全船供电造成重大影响,但动力系统的主机往往只有一台或两台,一旦发生故障,轻者会使船舶动力配置失衡,重者会使船舶失去动力,对船舶的安全性造成严重影响。
其三,由于动力和电力系统相互独立,不能相互进行“动力借用”,使得整个船舶动力总容量配置较大,且在各种运行工况下,动力调配模式很少,不能实现灵活的动力调配,达到最节能优化的经济航行。
为了解决以上问题,船舶设计专家们提出了轴带发电机的设想,并对工程中得到了成功应用,即在主轴变速箱上设置一个副轴作为动力输出,带动了一台发电机,在主机轻载运行时投入该轴带发电机为船舶提供部分电力,这样就可以少投入一些柴油发电机组甚至切除所有电站等柴油机组,由轴带发电机向全船供电。从而大大节省了燃料消耗突现了节能运行,同时也解决了主机长期轻载运行的积碳等问题。因此这一解决方案可以很好地解决了上述第一个问题。但对第二个和第三个问题却仍不能得到很好地解决,为解决第二个问题,国外造船界提出了“带我回家”(take me home)的概念,即在主机发生故障时,不致使全船失去动力,依靠船上的电站机组提供动力,通过轴带发电机可逆电动运行,把船舶“开回家”,这一概念的提出受到了船东的极大欢迎,许多国外船只均采用了这一先进技术,大大提高了船舶的安全性和可靠性。这种技术的关键,是如何实现轴带发电机的可逆运行问题,解决了轴带发电机的可逆运行,不仅可以实现“带我回家”的梦想,第三个问题——灵活调配船舶动力,实现优化节能航行迎刃而解。
目前船舶轴带发电——电动系统的需求量逐年上升。特别是远洋船舶、特种作业船舶及远海捕捞船,为了船舶的航行安全和便于作业,迫切需要配置该系统。但这种技术仅掌握在国外少数一些大公司手中,我国是造船大国,需要配置该系统时,主要依赖进口,对我国的船舶建造构成很大的限制。本文在详细分析了船舶轴带发电——电动系统的技术特点、技术难点及对各种设备的技术要求的基础上,针对船舶的实际需要提出了一套完整的解决方案,并对该方案的系统组成、工作原理及起动、运行控制策略等进行了详细论述。
2 轴带发电——电动系统技术要求及特点
2.1 发电工况技术要求和特点
船舶轴带发电——电动系统在发电工况时,原动机为船用主机,通过变速齿箱上的副轴驱动可逆行的电机作为发电运行,因此发电机的转速受船舶主轴转速的制约。一般来讲,船舶推进系统的螺旋桨分定矩桨和变矩桨两种,所谓定矩桨是指螺旋桨的桨矩角是固定的,船舶的推力依靠调节主轴的转速来调节,因此这种推进系统的主轴转速是变化的,从而使得发电机的输入转速也是变化的。所谓变矩桨是指螺旋桨的桨矩角是可调的,船舶的推力依靠调节螺旋桨的桨矩角调节,而主轴的转速是恒定的。上述两种推进系统所配的轴带发电机技术要求有很大的不同,对定矩桨系统,由于轴带发电机的输入转速是变化的,必须通过一定的技术手段来保证发电机在变速驱动的情况下,输出恒频恒压,即实现变速恒频恒压运行,才能保证轴带发电机系统与船舶电站的并联运行或独立稳定供电,这是这种推进系统下轴带发电机系统最大的技术特点和技术难点,通常这种推进系统下所配的轴带发电机不能是通常的同步发电机,应该是一些特殊的电机,如同步电机(永磁或电励磁)或异步电机加全功率变流器组成的系统,亦或双馈电机加专门的交流励磁系统。对于变矩桨推进系统,由于轴带电机的转速是恒定的,可以用常规的同步发电机作为轴带电机即可实现恒频恒压输出,系统简单,造价低廉。
2.2 电动工况技术需求和特点
当轴带发电——电动系统作为电动工况运行时,电源来自船舶电站,负载是整个推进系统的轴系和螺旋桨。其特点是电源容量较小,机械负载的转动惯量很大,对定桨矩螺旋桨推进系统而言,要求轴带电机作电动运行时转速保持恒定或基本恒定,通过调节螺旋桨的桨矩角来调节船舶推力,轴带电机的机械负载;属于恒速变转矩负载,可采用一般的同步电机或异步电机即可满足其要求。而对变桨矩螺旋桨推进系统,则要求轴带电机作电动运行时必须能够调速,通过调节电机转速来改变船舶推进主轴的转速,进而改变螺旋桨的推力和扭矩。电机的机械负载属于变速转矩负载。此时轴带电机除选用常规的同步电机或异步电机外,还要考虑调速装置方能实现此功能。
2.3 轴带发电——电动系统需考虑的技术问题
根据船舶轴带发电——电动系统的技术要求及特点,在设计该系统解决方案时应重点解决好以下技术问题。
(1)发电运行时与船舶电站的并联运行及独立供电问题
通常轴带发电机可享用永磁同步电机、普通电励磁同步电机、无刷电励磁同步电机、双馈异步电机或鼠笼异步电机等。若采用普通电励磁同步电机或无刷同步电机,且推进系统变为桨矩螺旋桨时,由于驱动转速恒定,则在发电工况下主轴驱动与其它原动机驱动无异,发电机并联运行和独立运行均不存在任何问题,无需特殊设计即可满足要求。但对定矩桨推进系统,由于驱动转速变化,使得发电机的频率和电压均会随着转速的变化而变化,以至于无法直接与船舶电站并联运行和独立供电,必须通过变频器来实现变速恒频恒压控制,才能实现并联运行和正常的独立供电。此时电机也需进行专门设计,以满足变速运行要求。若采用永磁同步电机,由于其端电压随负载、转速的变化而变化,则无论是定矩桨还是变矩桨,均需配置全功率变频器才能实现良好的并联运行特性和独立供电特性,若采用双馈机,则转子上必须配备转差功率变频器方可满足并联运行要求,但仍不能实现(或很难实现)独立供电要求,因此对于需要轴带电机独立供电的系统,不宜采用鼠笼异步电机。
(2)电动运行时的起动问题
通常同步电机具有较好的发电性能,但在电动运行时无法自起动是其最大的技术缺陷,双馈电机虽具有良好的发电性能和电动性能,但由于其结构上存在滑环碳刷系统,在可靠性和维修性方面存在较大隐患,鼠笼异步电机在电动性能和起动性能方面较为优越,但发电性能较差。因此解决同步电机的起动问题成为轴带电机系统的最关键问题,对永磁同步电机而言,由于必须配置全功率变频器,采用变频器来起动永磁电机是非常方便的。对普通的电励磁同步电机也可采用变频器来起动,但由于仍存在滑环碳刷装置,一般不常采用。对无刷同步电机而言,由于主机的励磁来自励磁机经旋转整流器供给,在电机未起动前,励磁机不发电主机就没有励磁电流而无法建立磁场,因此即使采用变频器也无法起动,必须采取其它的措施才能解决其起动问题。
(3)轴带系统的运行控制问题
为了保证系统的正常运行,需配置专门的控制系统,来实现各种运行工况的切换、系统起停、各种工况下的有功、无功负载调节及均载等功能。
由于船舶轴带发电——电动系统存在以上技术特点和技术难点,使得目前国内尚无成熟的技术和设备,系统主要依赖进口。现就一种可行的解决方案论述如下。
3 系统组成及工作原理
3.1 系统组成
系统组成如图1所示。该船采用变矩桨双机双桨推进系统,即船上有两台主机,双主轴双螺旋桨,每个主轴上通过变速箱输出一个动力副轴,经液压离合器与轴带电机相联,由于螺旋桨为变矩桨,主轴转速和轴带电机转速恒定,因此轴带电机采用无刷同步电机,为了解决无刷同步电机在电动工况下的起动问题,同轴上各加装了一台辅助起动马达,起动马达由专门的变频器供电用于起动。控制系统根据不同的运行工况,控制轴带电机、起动变频器、液压离合器等部件的起停、功能切换,有功无功负载调节及均载等。船舶电站由数台柴油发电机组组成。

图1
3.2 各种运行工况下的工作原理
该系统可实现以下四种工况运行
① 工况Ⅰ:轴带电动工况(PTO工况)
当船舶处于经济巡航状态时,两台主机处于轻载运行状态,利用主机的富余容量,使其在带动螺旋桨的同时,带动轴带电机处于发电状态,并根据船上的用电需求实现与船舶电站的并联运行成独立运行。
②工况Ⅱ:轴带电动工况( PTI工况)
当主机发生故障时,为使船舶不失动力,可用船舶电站作为电源为轴带电机供电,轴带电机处于领先地位电动状态带动螺旋桨使船舶低速航行,实现“带我回家”(Take me home)的目的,确保船舶安全。
③工况Ⅲ:并机推进工况
当船舶需要高速航行时,可采用轴带电机和主机并机推进的方式,以增大推进功率,实现高速航行。
④工况Ⅳ:单机双桨推进工况
当一台主机发生故障时,若只开动一台主机带动一套主轴推进系统,会使船舶动力失衡,必须靠舵来强行保持船舶的稳定运行。此时可采用单机双桨的运行工况,即开动一台主机,另一主机停止工作,使工作主机在推进螺旋桨的同时,带动其轴带电机处于电动状态,这样就能实现单主机运行,双桨推进的目的,仍能保证船舶动力的平衡。
4 系统的起动及控制
4.1 系统的起动
轴带电机处于发电状态时,电机被原动机拖动,不存在系统的启动问题,只需考虑轴带电机与船舶电站的并联运行即可,由于轴带电机为同步电机且输入转速恒定,因此它与其它发电机组的并联运行操作无异。
同样由于轴带电机为同步电机,当其作电动状态运行时,不能自起动,因此必须采取相应的技术措施来解决系统的起动问题。通常同步电机有三种起动方法:即异步起动法、变频起动法和辅助电动机起动法。前两种起动方法不仅需要配备价格昂贵的起动装置,成本较高,更为严重的是对无刷同步发电机而言,由于主励磁绕组不能引出,前两种起动方法对电机可能造成严重损伤,甚至不能起动,必须对电机进行特殊设计,在技术上难度很大,为此该系统采用辅助电动机法进行起动,但这种方法仍存在着起动转矩较小等问题,为提高起动转矩,起动电动机选用较大极数的异步电动机。另外由于主轴推进系统转动惯量很大且摩擦转矩很大,直接用起动电机来起动整个轴系需要起动容量很大,造成设备成本很大,为减少起动电机容量,本系统采用分步起动方式,即首先脱开主轴系统只用变频器和起动电机来起动轴带电机,待轴带电机空载起动并网完成后,再用液压离合器以柔性节拍将主轴系统投入联接。由于同步电机存在静态稳定问题,为保证同步电机在起动主轴时不失步在主轴系统投入过程中,必须科学控制液压离合器的投入节拍和转矩以控制轴带电机转矩不超过电机的最大转矩。对主轴推进系统而言,起动过程中的转矩为:式中:Tst:起动转矩(电机的转矩);J:主轴转动惯量;T0:主轴系统摩擦转矩;ω:主轴角速度。

由①式得

式中:n——主轴转速。
以上两式表明,在主轴系统起动过程中,主轴转速的增大,与轴系转动惯量成反比,与电机转矩减去摩擦转矩之差在时间上的积分成正比,在轴系转动惯量一定时,主轴转速的增量与图 2阴影部分的面积成正比。由图2可见,在起动过程中必须限定电机转矩不超过某一安全转矩,在此基础上尽量缩短起动时间,为此在液压离合器的控制方面应该尽量缩短时间,即在较短时间内使电机转矩达到设定值,并维持此设定值不变直至将主轴起动到额定转速。
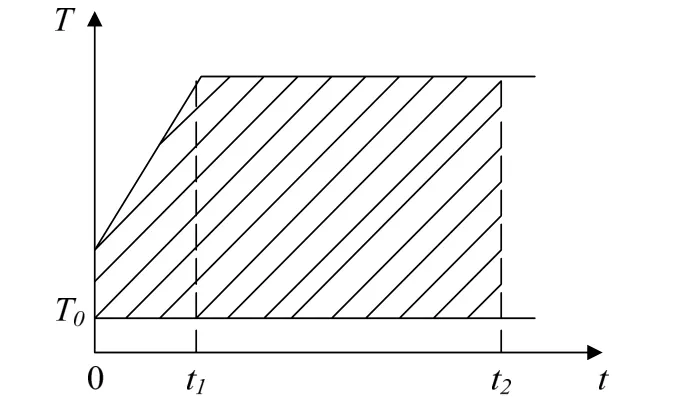
图2
4.2 各种工况下的控制策略
① 对工况Ⅰ,发电机制励磁控制与常规发电机组控制基本相同,即主要以使发电机恒压及并联运行时无功功率分配合理为控制目标。
② 对工况Ⅱ,为保证轴带电机的稳定运行和尽量降低电枢电流轴带电机的励磁控制应在较低转矩时按功率因数为1控制目标;高转矩时按某一特定函数使无功电流随转矩的增大而增大,同时还要限定电枢电流,确保电机不过流。
③ 对工况Ⅲ,主要考虑在轴带电机与主机并机推进时,科学合理地分配二者的转矩。由于系统中轴带电机采用了励磁控制,没有实施电枢控制,因此该工况的控制主要由主机调速系统实现。
④ 对工况Ⅳ,由于轴带电机一台处于发电状态,一台处于电动状态,因此对系统的控制主要围绕两台电机的有功和无功功率与分配和两套主轴推进系统的推力均衡为目标,此时两台轴带电机的励磁应为一台主动一台从动,保证两台电机稳定运行。
5 结束语
上述轴带发电—电动系统已经成功应用于粤海火车轮渡项目中,经过陆上系统联调,系泊试验和航行试验,各工况下设备运行良好,达到了预期效果。该系统具有系统简单、功能强大、控制灵活、操作简单等特点,该系统的研发成功填补了国内大型船舶轴带发电—电动系统的空白,也为其它类型(如定桨矩推进系统)的轴带发电—电动系统的研发奠定了技术基础,该系统所形成的技术可推广到其它特种船舶和运洋船舶中,应用前景广阔。
[1]许实章. 电机学. 北京: 机械工业出版社, 1990.
[2]陈伯时. 电力拖动自动控制系统. 北京: 机械工业出版社, 2003.
[3]范钦珊, 刘燕, 王琪. 理论力学. 北京: 清华大学出版社, 2004.
[4]彭鸿才. 电机原理及拖动. 北京: 机械工业出版社,1996.
[5]谢传锋. 动力学. 北京:高等教育出版社,1999.
猜你喜欢
防爆电机(2020年6期)2020-12-14
四川冶金(2018年1期)2018-09-25
制造技术与机床(2017年9期)2017-11-27
制造技术与机床(2017年3期)2017-06-23
光学精密工程(2016年3期)2016-11-07
通信电源技术(2016年1期)2016-04-16
电子工业专用设备(2015年4期)2015-05-26
电机与控制应用(2015年3期)2015-03-01
电机与控制应用(2015年3期)2015-03-01
大电机技术(2015年5期)2015-02-27
