
一种基于TMS320DM642的多参数火灾探测系统
2011-06-05 10:19:44陈晓娟卜乐平杨加军
船电技术 2011年7期
陈晓娟 卜乐平 杨加军
(1. 海军工程大学电气与信息工程学院,武汉 430033;2. 91458部队,海南三亚 572000)
1 引言
传统的火灾探测系统[1,2]是根据监控现场某种单一的传感器所采集的火灾特征信号,采用阈值法[3]来判定火灾是否发生。这样的系统很难准确获取监控现场的火灾特征信号,误报漏报现象十分严重。目前,大量的研究人员正在研制以微处理器为核心的多传感器火灾探测系统,降低火灾的误报率和漏报率。这种探测系统其实是一个智能化的火灾自动探测报警终端。它可以单独部署于火灾监控现场,也可以组网建立分布式火灾监控系统。
随着电子技术的飞速发展,DSP的性能指标不断提高,应用的领域也不断扩大,可以实时完成图像信号的处理。本文选用高性能的TMS320DM642芯片为核心,设计了一款多参数火灾探测系统,实现火灾现场图像、温度、烟雾浓度数据的采集、编码、存储、传输,通过对火灾图像纹理特征[4]信号的提取,及对纹理、温度、烟雾浓度等火灾特征信号的分析处理,完成重要场所的火灾监控和自动报警。
2 系统设计
2.1 基本要求
为了实现对火灾情况准确而及时的预报,要求火灾探测系统能在每秒钟采集数帧图像,每帧图像要求能达到一定的分辨率,同时采集一组温度、烟雾数据,能实时存储采集的所有数据,并将数据传送至主控计算机,使指挥人员及时了解现场火灾情况,从而做出正确的决策。报警终端要根据采集的所有数据迅速计算提取火灾的特征信号,并进行多判据火灾的识别,如发生火灾则通知主控计算机。主控计算机得到火灾的信息,应能立即驱动自动报警装置,同时能报告火灾发生的地点位置。因此,火灾探测系统至少应该包括4个模块:火灾现场图像采集、编码、传输模块,温度和烟雾浓度数据采集模块,火灾图像纹理信号提取模块,火灾特征信号分析处理模块。这样,火灾探测系统必然涉及到大容量视频图像的高速数据采样、存储与处理,需要一款高性能的DSP器件。本文选用的DSP为TMS320DM642芯片。
2.2 TMS320DM642芯片
TMS320DM642芯片是美国德州仪器公司推出的一款面向数字多媒体应用的DSP,集成了完备的视频输入输出接口、以太网接口等片上外设,能与视频编解码器件、以太网总线可靠无缝连接。该芯片主频为600 MHz,能够实时处理大容量的视频数据,提取火灾特征信号,识别输出火灾报警信号,能够通过以太网接口实时传输火灾监控现场图像,满足火灾探测系统的基本要求。
2.3 系统基本原理
火灾探测系统的基本原理如图 1所示。TMS320DM642芯片通过TVP5150视频解码模块与彩色 CCD摄像机连接在一起。TVP5150模块接收两路复合视频信号,解码后输出BT.656格式的视频流数据。TMS320DM642则支持BT.656格式的视频流数据,能与TVP5150的数据流进行无缝连接。同时,TMS320DM642芯片通过TL16C752B通用异步收发器具备了 RS485接口通信的功能。这样选用 CHD301C型温度传感器和CHD-LH93烟雾传感器可以很容易实现温度、烟雾数据的采集,因为该类型的传感器均封装了RS485接口。为了提高火灾探测系统的可靠性,避免单个传感器故障引起系统不能正常工作,每一个传感器均通过两个 20 Ω的电阻接入 RS485总线,同时在RS485总线的末端接入120 Ω的终端电阻。
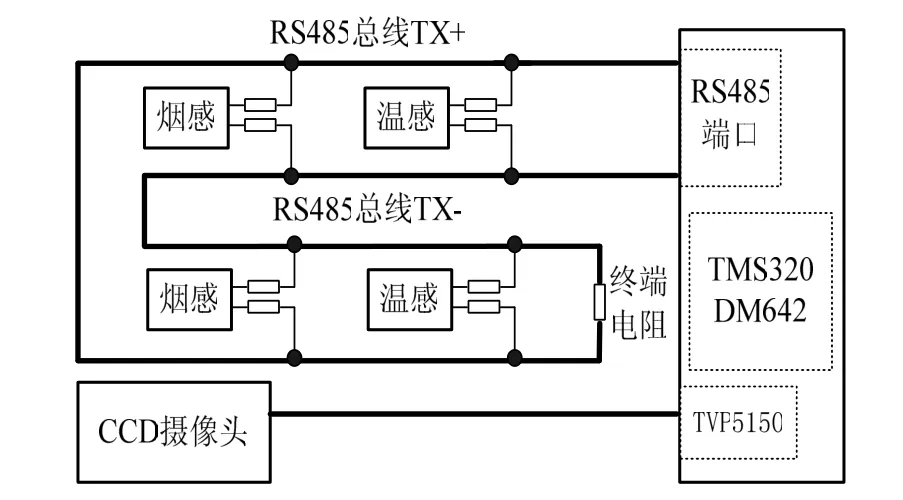
图1 火灾探测系统原理
3 数据采集及处理
3.1 视频压缩传输
为了及时了解现场的情况,一般需将现场的视频图像传输到主控计算机,而对一帧未经处理图像来说,其数据量相当大,如 320 ×240 ×8bit的图像为 75 kb,如果不经处理进行图像传输,无疑会增加系统的复杂性。因此应对图像进行压缩传输。我们知道,图像数据间存在着很大的冗余性,有压缩的余地,如应用国际静态图像压缩标准JPEG算法[5],一般图像的压缩率可达到10~20 倍。对于本系统,摄像机是固定的,其摄入的图像前后两帧之间极其相似,至少背景应一样,因此选择对捕获图像的前后两帧的差值进行JPEG压缩,必然会大大提高压缩率,减少数据量,而主控计算机的任务则是对传输过来的压缩数据按相反的过程进行解压显示,为了显示的连续性,主控计算机可对其进行插值以达到动态效果。压缩处理后的数据通过以太网接口传输。
3.2 温度和烟雾浓度数据采集及处理
温度、烟雾传感器与TMS320DM642之间采用 Modbus协议进行通信,其中 TMS320DM642作为主设备,传感器作为从设备,主设备可以向从设备发送查询指令字符串,从设备根据主设备查询指令作出相应反应,主设备采用中断方式接收从设备数据并进行处理,通信过程如图2所示。每一个从设备通过一个不同的地址来标识。本文在温度、烟雾数据采集过程中,按照最多同时接6个温感和6个烟感的情况设计采集程序。通信波特率取9600,则TMS320DM642与任一个温度或烟雾传感器之间完成一次通信的所需时间大约30 ms。因此,在程序中定义了一个周期为40 ms的定时器控制完成温度、烟雾浓度数据的采集。这样通过设备地址循环的方式,可以在 480 ms内完成所有传感器数据的采集。在完成最后一个传感器数据采集后计算温感的平均温度和烟感的平均烟雾浓度,并分别存放到全局温度参数序列空间和烟雾浓度参数序列空间,供火灾识别使用。

图2 主从设备通信过程
3.3 图像数据采集及处理
图像数据采集则在定时器的控制下每 160 ms采集一帧,获取的图像数据处理流程如图 3所示。现假设火灾现场图像的四个纹理参数分别记为x1,x2,x3,x4,则火灾现场图像的四个纹理参数的平均波动量为

根据纹理参数平均波动量的变化情况,可以进行火灾的识别。在图像数据的处理过程中,针对温度、烟雾浓度、纹理特征平均波动量序列分别运用趋势算法、阈值算法、概率神经网络算法完成火灾的自动识别,三种识别结果经过与或融合后完成火灾的报警输出。
4 火灾实验及识别
火灾实验过程中,使用了2个温度传感器和2个烟雾传感器,分别记为1、2、3、4号。1号温度传感器和3号烟雾传感器放置于火源正上方250 cm处,2号温度传感器和4号烟雾传感器高度为135 cm,与火源斜距为215 cm。CCD摄像头的高度为200 cm,与火源的斜距约为300 cm。实验过程中共采集了774帧图像,图4中分别为第31帧、第296帧和339帧图像,第296帧对应火灾发生时刻。火灾实验提取得到的纹理平均波动量、平均温度、平均烟雾浓度变化曲线如图 5所示。

图3 图像数据处理流程图

图4 火灾图像
根据图5所示的火灾特征参数变化曲线,能够完成火灾的自动识别。本文中针对纹理平均波动量判据选用概率神经网络识别火灾。概率神经网络输入样本为包括当前图像的连续 51帧图像对应的50个纹理平均波动量构成的列向量,也就是说火灾实验中采集到的774帧图像,分析处理后可得到773个纹理平均波动幅度,并对应723个输入样本,这可以保证火灾输入样本包含有足够的火灾信息,可提高火灾识别的准确性。
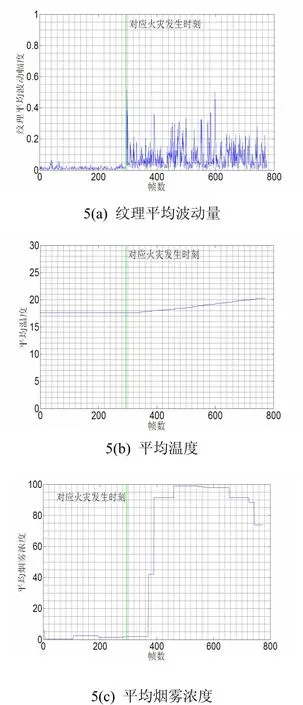
图5 火灾特征参数
针对温度、烟雾浓度判据分别选用成熟的趋势算法和阈值法进行火灾识别。三种判据识别的结果通过与或融合后完成火灾的报警输出。实验表明:(1)该系统能够根据纹理参数平均波动量序列可以快速发现早期火灾,具有重要的应用价值。(2)火灾的不可控性,体现为纹理参数的波动变化,而日光灯的开关、酒精灯的点燃对应的纹理参数体现为阶跃变化,这种差异可以用来剔除日光灯、酒精灯等引起的干扰,提高系统的抗干扰性。(3)该系统中同时引入纹理参数、烟雾浓度、温度等多种判据,极大的提高了系统探测火灾的可靠性。(4)该系统很容易组网构建形成分布式智能化的火灾监控系统, 主控计算机则可以根据火灾识别结果调取现场图像,确认后驱动报警装置和灭火装置,扑灭火灾。因此,基于TMS320DM642的多参数火灾探测系统,能够克服常规探测技术的缺陷,有效提高火灾探测系统的灵敏度和可靠性。
5 结论
本文围绕TMS320DM642芯片设计的多参数火灾探测系统,能够可靠实现火灾现场图像、温度、烟雾浓度数据的采集、编码、传输,能够可靠实现火灾图像纹理特征信号的提取,通过分析处理纹理、温度、烟雾浓度等火灾特征信号,能够完成重要场所的火灾监控和自动报警。该探测系统很容易组网构建分布式智能化的火灾监控系统,具有良好的应用前景。
[1]丁永忠, 彭万权, 魏哲, 周海, 张旭方. 基于嵌入式的智能火灾监控系统设计[J]. 武汉理工大学学报,2008, 4(30): 132-134.
[2]藏晶. 基于支持向量机的火灾探测系统研究[J]. 沈阳理工大学学报, 2009(01): 54-56.
[3]吴龙标, 方俊, 谢启源. 火灾探测与信息处理[M].北京: 化学工业出版社, 2006: 193-200.
[4]陈晓娟, 卜乐平, 李其修. 基于图像处理的明火火灾探测研究[J]. 海军工程大学学报, 2007, 19(3):6-11.
[5]张宏林. Visual C++数字图像模式识别技术及工程实践[M]. 北京: 人民邮电出版社, 2003: 453-454.
猜你喜欢
小学阅读指南·低年级版(2021年3期)2021-03-19 06:12:40
软件(2020年3期)2020-04-20 01:45:18
华人时刊(2019年13期)2019-11-26 00:54:38
民用飞机设计与研究(2019年4期)2019-05-21 07:21:30
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:00
成都信息工程大学学报(2018年4期)2019-01-23 06:57:24
电子制作(2018年23期)2018-12-26 01:01:02
传感器与微系统(2018年7期)2018-08-29 00:44:20
当代陕西(2017年12期)2018-01-19 01:42:05
Coco薇(2017年8期)2017-08-03 15:23:38
