基于H_PWM-L_PWM调制的无感无刷直流电机转子位置的检测
2011-06-02 05:31:00王宝忠孙健涛
电机与控制应用 2011年7期
王宝忠, 孙健涛, 要 丹
(江苏科技大学,江苏镇江 212003)
0 引言
永磁无刷直流电机(Permanent Magnet Brushless DC Motor,PMBLDCM)由于其功率密度高、效率高、控制简单、维护方便、寿命长等优点,在工业控制和家电产品中得到了广泛应用。电机的换相,需要准确检测到转子位置,而有位置传感器的电机增加了电机的体积和成本,降低了系统运行的稳定性,限制了电机的运用场合。因此,对无位置传感器电机控制的研究,能够增加系统的稳定性,进一步扩大无刷直流电机的应用领域。
本文采用两相导通星形三相六状态的控制模式,通过分析在H_PWM-L_PWM调制方式下不导通相续流情况,提出了在该调制方式下的反电动势检测法。传统的反电动势法[1-2]需要检测端点电压和中心点电压。该方法只需要检测端点电压,通过端点电压得到不导通相的反电动势,再对其过零点进行检测,根据电机速度和低通滤波频率特性进行相位补偿[3],从而获得换相时刻。该方法下检测到的反电动势是不导通相的两倍反电动势,从而能够更有效地检测到电机低速时的反电动势。
1 转子位置的检测
1.1 电机的模型

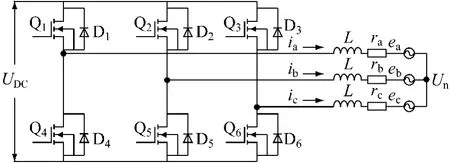
图1 三相星形连接全桥驱动的电路原理图
两相导通星形三相六状态的电路模型如图1所示,电机正向旋转时MOS管的导通顺序为假设[4]:(1)电机定子三相完全对称,空间上相差120°,三相绕组电阻、电感参数完全相同;(2)转子永磁体产生的气隙磁场为方波,三相绕组反电动势为梯形波;(3)忽略定子绕组电枢反应的影响;(4)电机气隙磁导均匀,磁路不饱和,不计涡流损耗。
理想状态下,反电动势和绕组相电流波形如图2所示。B相为不导通相时的波形如阴影部分所示。
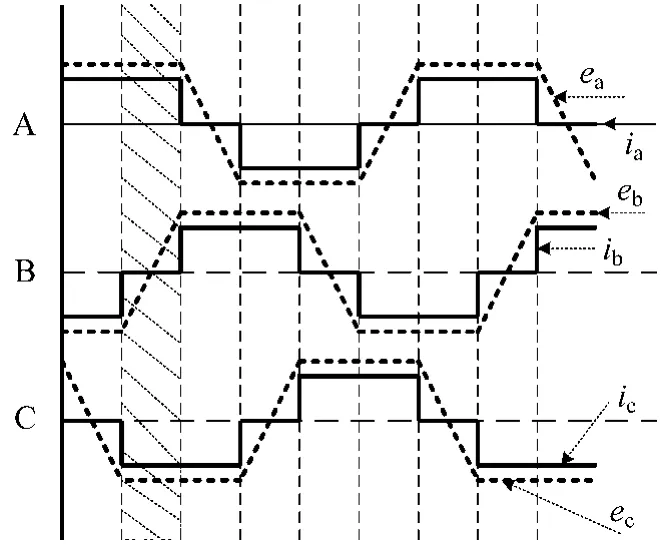
图2 理想状态下的反电动势和相电流的波形
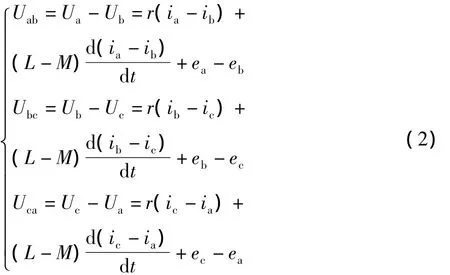
根据上面的假设,无刷直流电机三相绕组的电压平衡方程为
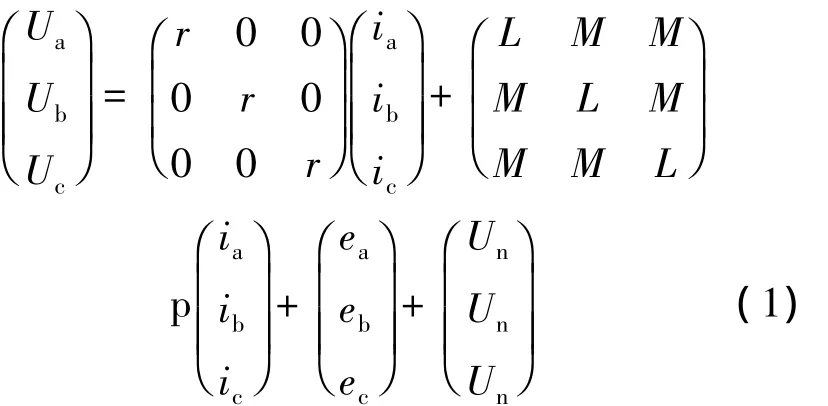
式中:Ua、Ub、Uc和 Un——三相端电压和中点电压;
ea、eb、ec——三相反电动势电压;
r,L——三相电枢绕组电阻和电感;
M——每相绕组之间的互感;
ia、ib、ic——三相绕组电流;
由三相绕组的电压平衡方程得到端点电压差方程:
由端点电压差方程可推导出:
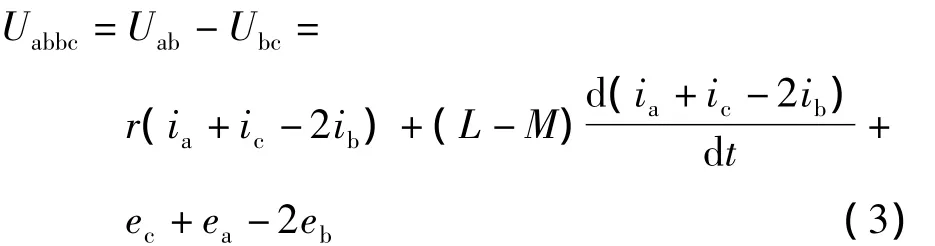
当A,C相导通,B相不导通时,由于绕组为星型连接,没有中线,所以ia+ib+ic=0。A相和C相的反电动势相等且相反,ea=-ec,代入式(1)可得:
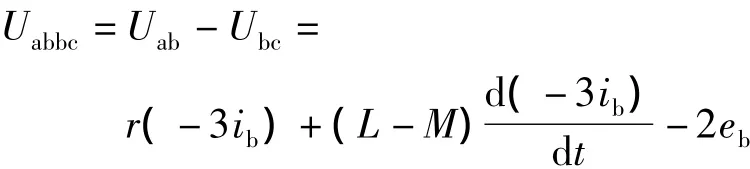
从而得到B相的2倍反电动势:

同理,可得到A相和C相的反电动势方程。
分析B相反电动势方程:如果不导通的B相没有电流流过,即ib=0,就可以准确地得到B相的反电动势:eb=(Ubc-Uab)/2。
无刷直流电机的脉宽调制(Pulse Width Modulation,PWM)控制一般有 6 种调制方式[5],基于上述分析,该文提出采用H_PWM-L_PWM调制方式进行无刷直流电机转子位置的检测,该调制方式下不导通相电流为零。
1.2H_PWM-L_PWM调制方式分析
以不导通的B相为例,在该调制方式下有Q1和Q6管同时PWM_ON或同时PWM_OFF两种情况。
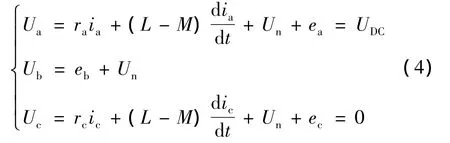
当Q1和Q6两个MOS管同时导通时,假设,电流只从电源正经过Q1,经过A相、C相绕组,再经过Q6到电源负。电流流向如图3所示。忽略MOS管和二极管的管压降,得到三相端电压方程:
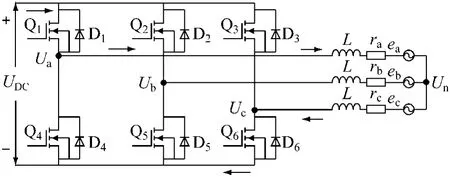
图3 PWM_ON时的电流流向
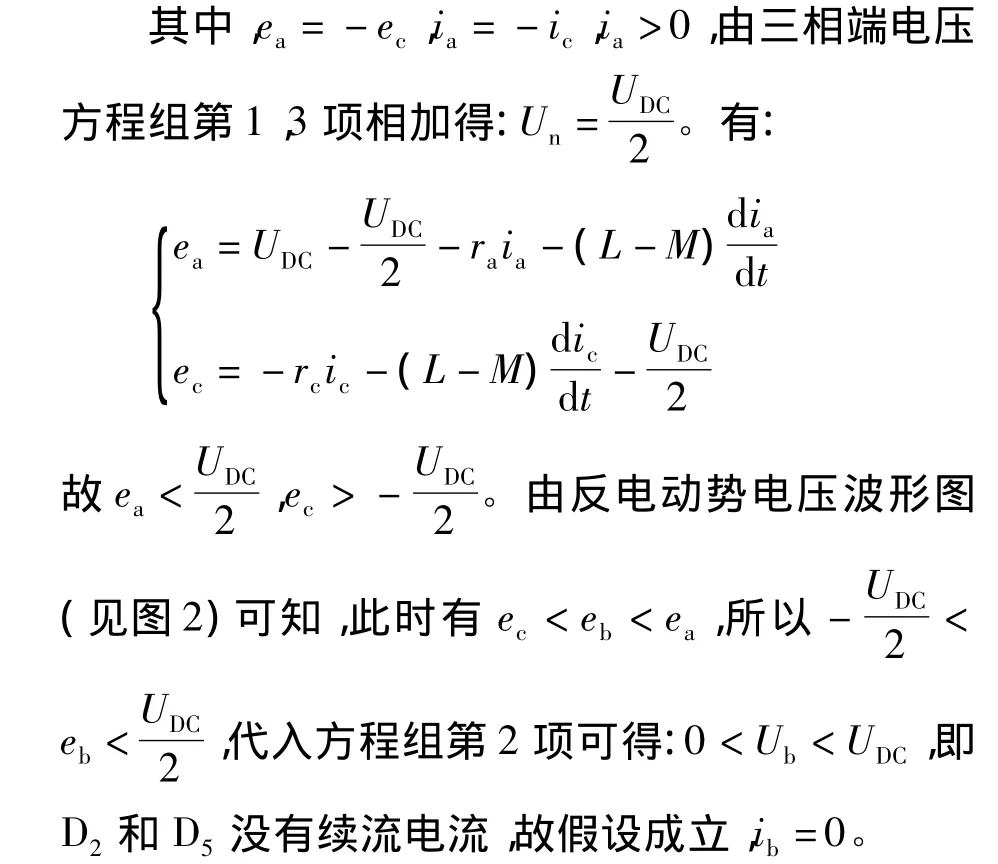
当Q1和Q6两个MOS管都关断时,假设B相不续流,即D2、D5没有续流电流流过。电流流向如图4所示。
忽略MOS管和二极管的管压降,得到三相端电压方程:
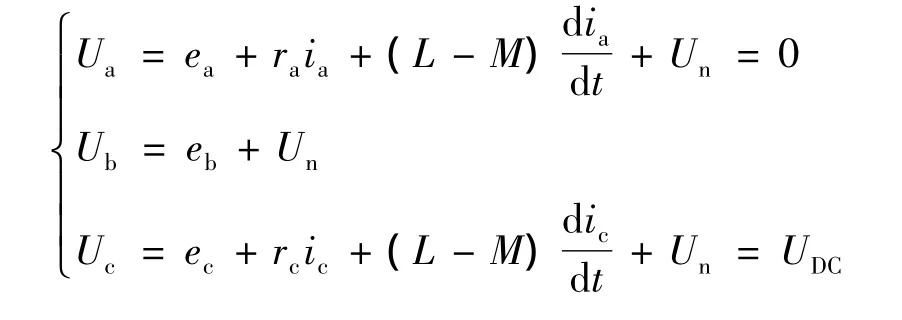
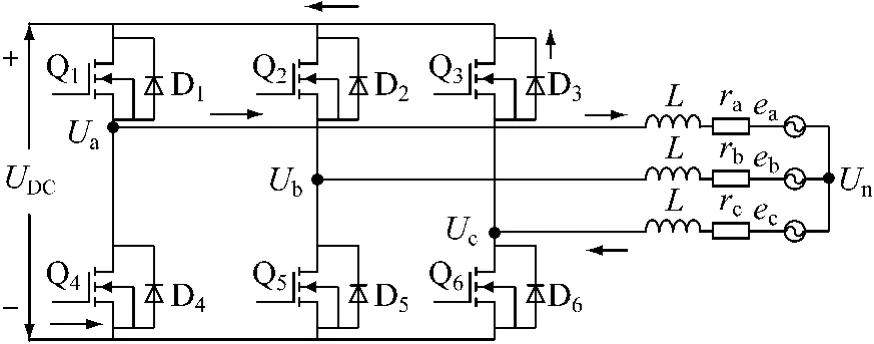
图4 PWM_OFF时的电流流向

采用H_PWM-L_PWM调制方式时,不导通相电流为零,能够获得准确的不导通相反电动势来进行转子位置的检测。
2 控制方法
该控制系统采用TI的TMS320F2812为主要控制芯片,DSP2812的事件管理器(EV)在运动控制和电机控制领域为用户提供了强大的控制功能[6]。系统的控制框图如图5所示。
三相端点电压分压滤波后,经过反电动势检测电路(见图6),得到反电动势的过零点信号,再经过光电隔离后送到数字信号处理器(Digital Siginal Processor,DSP)的捕获端口,DSP通过定时器计数CAP中断的次数和读定时器的值计算出电机的转速;根据电机的转速和低通滤波器的频率特性,对获得的反电动势过零点进行相位补偿,从而得到准确的换相时间。
DSP2812通过比较给定的和计算的速度来进行闭环控制,调节PWM波的占空比,从而达到调节速度的目的。
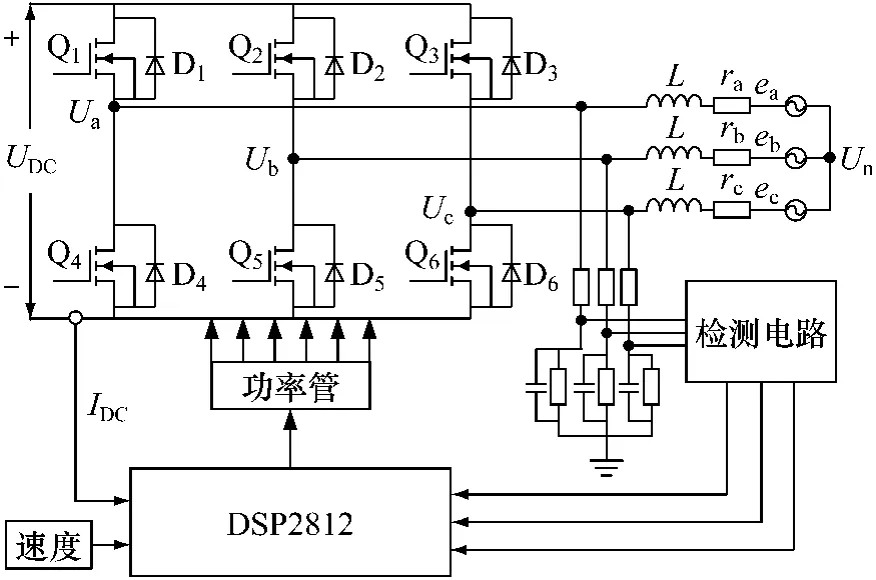
图5 系统的控制框图
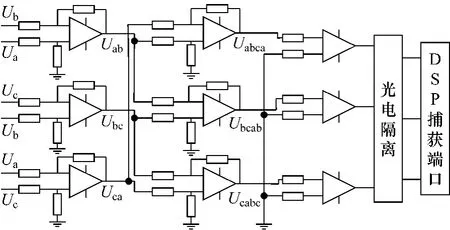
图6 反电动势检测电路
3 仿真和试验结果
对该反电动势检测法进行了MATLAB的仿真,利用 MATLAB/Simulink/SimPowerSystems中的无刷电机模块得到电机的模型,如图7所示。
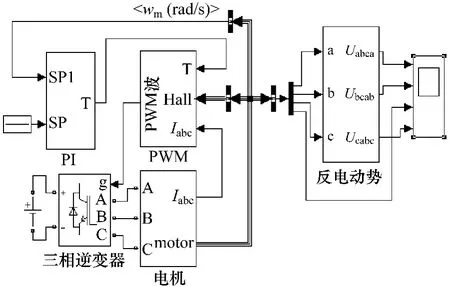
图7 系统仿真图
仿真结果如图8所示。仿真所得到的B相的2倍反电动势为Ubcab,HB是B相反电动势所对应的换相信号。仿真结果证明,该反电动势法能准确获得换相时刻。
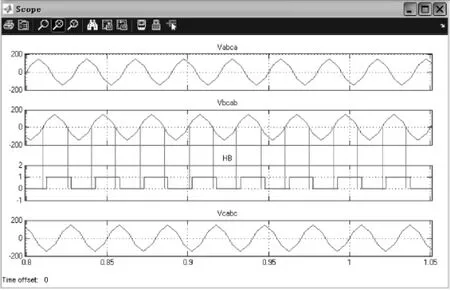
图8 MATLAB的仿真结果
试验采用额定电压为24 V,额定功率为25 W,极对数为2,额定转速为3 000 r/min的无刷电机进行试验。试验速度给定分别为150 r/min和1 500 r/min,将所检测到的反电动势过零点与电机自带的霍尔传感器输出的换相波形比较。反电动势过零点的相位补偿全由DSP程序来实现,试验结果如图9所示。电机在低速运行时,也能准确检测到不导通相的反电动势。

图9 给定转速分别为150 r/min和1 500 r/min的试验波形
4 结语
试验证明,本文提出的基于H_PWM-L_PWM调制方式的转子位置的检测方法,不同于基于检测端点和中心点电压的反电动势方法。该方法只需要检测端点电压,不需要中点电压;通过续流分析,证明该调制方法在非导通相上没有电流流过,能够准确地获得反电动势的过零点;端点电压经过运算电路后,得到不导通相的2倍反电动势,说明比传统反电动势法能够更有效地检测到更小的反电动势,且有良好的低速性能。但是,采用该调制方式控制时,电机的换相转矩脉动较大[7]。
[1]林明耀,王永,李海文,等.反电动势无位置传感器无刷直流电机最佳换相逻辑分析[J].中小型电机,2003,30(5):14-16.
[2]陈红平,杨喜军,葛万来,等.BLDCM直接反电动势转子位置检测控制系统研究[J].电力电子技术,2005,39(1):61-63.
[3]何小红.无位置传感器无刷直流电动机控制系统的设计[D].西安:西安科技大学,2009.
[4]刘刚,王志强,房建成.永磁无刷直流电机控制技术与应用[M].北京:机械工业出版社,2008.
[5]Li Qiang,Huang Hai Yin,Bin Chuan.The study of pwm methods in permanent magnet brushless dc motor speed control system[C]∥Proceedings of the11th International Conference on Electrical Machines and Systems,ICEMS 2008,2008:3897-3900.
[6]王忠勇,陈恩庆.DSP原理与应用技术[M].北京:电子工业出版社,2009.
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
数学物理学报(2022年2期)2022-04-26 14:08:34
郑州大学学报(工学版)(2020年2期)2020-06-16 12:43:14
中学生数理化·教与学(2019年8期)2019-09-18 15:08:40
汽车电器(2019年2期)2019-03-22 03:35:16
数学物理学报(2017年1期)2017-06-05 09:12:28
电子制作(2017年1期)2017-05-17 03:54:12
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27 06:31:52
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年1期)2015-03-01 03:49:10