鱼雷PMBLDCM在线智能PID控制器建模与仿真
2011-05-27 08:52谢顺依郭志荣张林森
水下无人系统学报 2011年2期
王 鼎, 谢顺依, 郭志荣, 张林森
鱼雷PMBLDCM在线智能PID控制器建模与仿真
王 鼎, 谢顺依, 郭志荣, 张林森
(海军工程大学 兵器工程系, 湖北 武汉, 430033)
针对应用于新型鱼雷武器中的永磁无刷直流电机(PMBLDCM)转矩脉动较大引起的噪声和振动等问题, 设计了离线训练与在线训练相结合的智能比例积分微分(PID)控制器。首先, 通过分析被控对象负载扰动大的特点, 利用人工神经网络建立了自校正调节器, 将其与传统的PID控制器相结合,通过在线调节PID参数以达到最优的控制效果; 其次, 在Simulink中搭建了在线智能PID控制系统模型并进行了仿真试验。仿真结果表明, 在线智能PID控制器具有较好的适应性和鲁棒性, 系统具有良好的动态响应性能。
鱼雷; 永磁无刷直流电动机(PMBLDCM); 转矩脉动; 神经网络; 自校正调节器
0 引言
永磁无刷直流电动机(permanent magnetic brushless DC motors, PMBLDCM)具有调速方便、结构简单、维护简便、电磁污染小、功率密度大等优点, 正在逐步应用到鱼雷动力系统中。但因其转矩波动较大, 不但会产生噪声和振动等问题[1], 导致鱼雷隐蔽性降低, 还会影响整个系统的性能, 从而降低鱼雷电机使用寿命和驱动系统的可靠性, 制约其在鱼雷动力系统中的推广。然而, PMBLDCM具有的其他电机所不具备的优良特性, 正是鱼雷武器系统所迫切需要的, 因此, 如何抑制PMBLDCM的转矩脉动,发挥其最大效率就成为急需研究的问题。
针对上述问题, 本文利用人工神经网络对被控对象负载扰动大的特点建立自校正调节器, 将其与传统的比例积分微分(proportional integral differential, PID)控制结合, 设计离线训练与在线训练相结合的在线智能PID控制器, 通过在线调节PID参数以达到最优控制效果, 并进行建模与仿真, 以期减小PMBLDCM转矩脉动。
1 PMBLDCM数学模型及换相转矩脉动抑制原理
PMBLDCM原理如图1所示, PMBLDCM按星型连接120°导通方式工作时, 假设磁路不饱和, 不计涡流和磁滞损耗, 三相绕组完全对称[2], 则三相绕组的电压平衡方程为
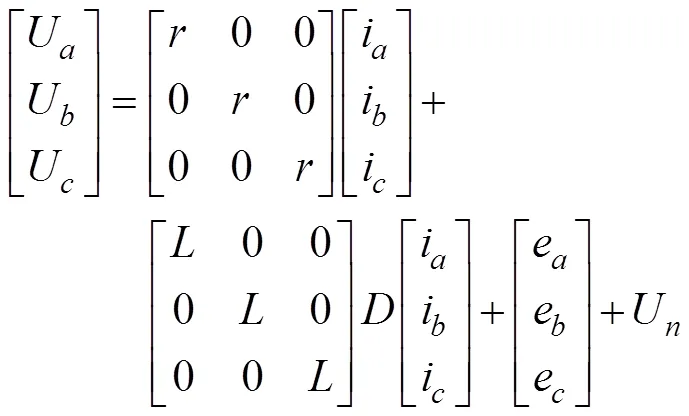
式中:U,U,U为相电压;为相电阻;i,i,i分别为相电流;为相有效电感;为微分算子;e,e,e为相反电势。
图1 PMBDCM原理图
Fig. 1 Principle of PMBLDCM
以电流从A相换流到B相(上桥臂换相), C相为非换向相为例分析。设换相期间电机转速一定, 反电动势为理想梯形波形(平顶宽度为120°), 并认为换相期间各相反电动势幅值不变, 即

式中,k为反电动势系数。
换相前, 不考虑非导通相续流, 有i=i,i=0,e=-e=。设T1为换相前电磁转矩,T2为换相期间电磁转矩, 则


由式(3)和式(4)可知, 速度一定时, 换相前后电磁转矩与非换相绕组上的电流成正比。因此, 在电机反电动势为理想梯形波情况下, 如果能够保证换相期间非换向相绕组上流过电流不变, 则可以抑制换相转矩脉动。设换相前C 相电流稳态值为0, 由式(1)可得
式中,U1=U-U, 表示 C相绕组上换相前施加电压。设U2为换相期间C相绕组上施加电压, 则换相期间C相电流可以表示为

令0=i, 得

则
由式(9)可知, 如果能够保证换相期间非换向相绕组上施加电压维持不变, 则可以保证换相期间非换相绕组电流不变, 从而可以有效地抑制换相转矩脉动[3]。
2 换相转矩脉动抑制策略的实现
若换相期间采用特定的调制方式使非换向相绕组电压维持恒定, 则可有效抑制换相转矩脉动[4]。本文采用自校正调节器与传统PID控制器相结合的控制策略, 其控制原理如图2所示。
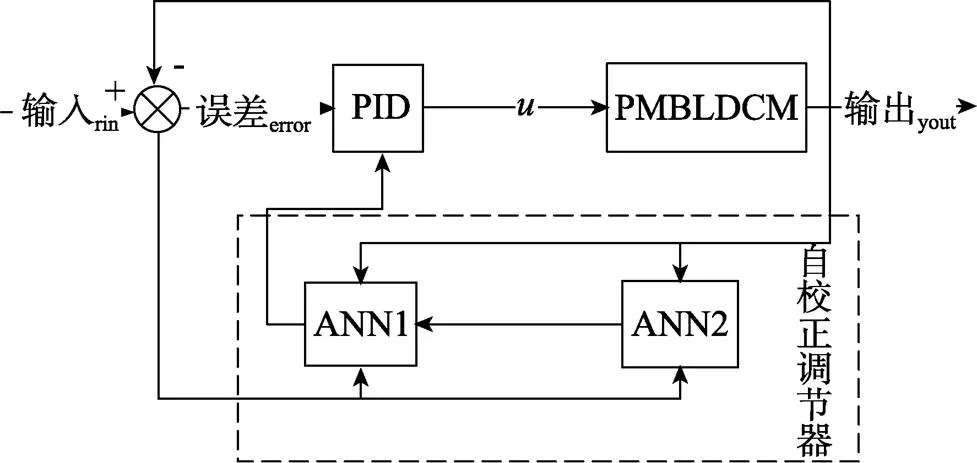
图2 在线智能PID控制器原理图
2.1 自校正调节器的设计
自校正调节器的设计思路是把未知参数的估计和控制器的设计分开进行。未知参数用递推估计方法在线估计, 估计出的参数就可以被看作真实参数, 对系统进行调节[4]。本文的控制系统中自校正调节器是以BP神经网络进行在线估计, 同时也是以BP神经网络来实时更新PID控制器中的3个可调参数k,k,k。
如图2所示, 网络ANN2的输入为rin2与yout2, 以ANN2估计出的参数(神经元之间的权值)作为真实参数建立模型ANN1, 而ANN1的输入是rin1与yout1, 即认为rin1= rin2, 得出理想状态下的PID参数。同时, PID参数作为网络ANN2的训练教师, 与ANN2的输出PID参数比较, 误差用于修正权值。最终, 网络ANN1与ANN2的输入与输出均完全一样, yout1与yout2也近似相等。在控制对象的参数有变化时, ANN2可以随时修正参数, 同时更新ANN1的权值, 使网络模型始终逼近实际模型。
2.2 在线智能PID控制系统
设计的在线智能PID控制器由自校正调节器和PID控制器构成,自校正调节器应用BP神经网络根据系统运行状态调节PID控制器参数,以达到最佳的控制效果, PID控制器则负责直接闭环控制电机电流。控制器输入rin=Iin; 中间变量=,为脉宽调制(PWM)信号的占空比; 输出yout=。
经典的增量数字PID控制算式为

式中,k,k和k分别为比例、积分、微分系数, 可利用基于BP神经网络的自校正调节器调节来找到一个最佳控制规律[5]。
本文中BP神经网络的结构为4-5-3。神经网络的输入层节点选为=[rin() yout() error() 1], 输出层节点分别对应PID控制器的3个可调参数k,k和k。由于k,k和k不能为负值,所以输出层神经元的激发函数取非负的Sigmoid函数,而隐含层神经元的激发函数取正负对称的Sigmoid函数[5]。

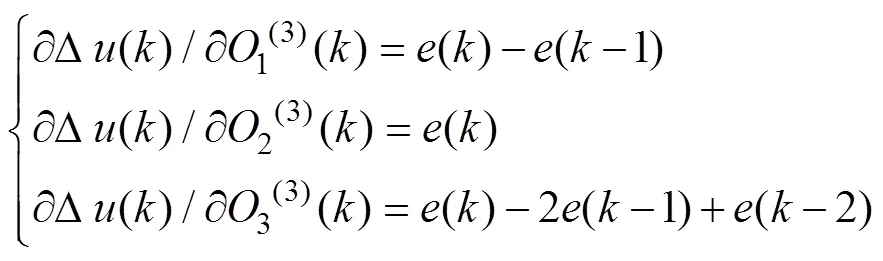
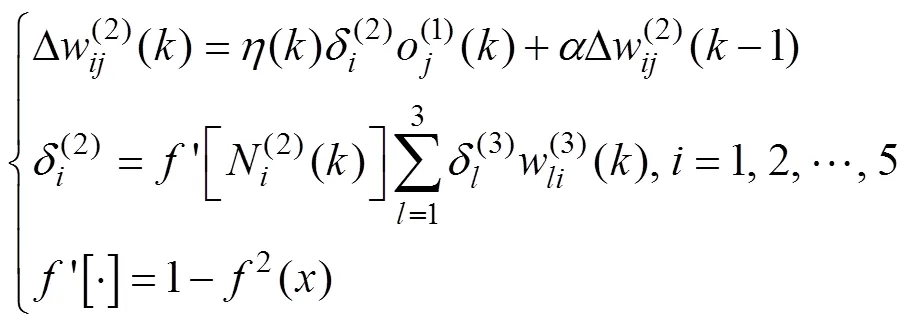
因此可得神经网络输出层权系数计算公式
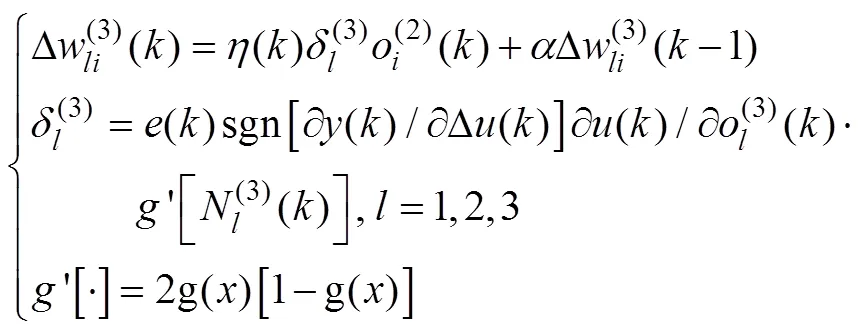
式中:()为学习速率;为惯性系数。
据上述推算方法得隐含层权系数计算公式
3 仿真结果
为了验证所设计的控制器效果,在Matlab/ Simulink中搭建控制系统模型并进行仿真研究[6-7], 如图3所示。仿真样机参数: 额定功率=4 000 W, 额定电压=300 V, 额定转速=2 500 r /min, 额定转矩T=1.8 N·m, 每相绕组电阻= 7.82 Ω, 有效电感=40 mH, 转动惯量=1.23×10-4kg·m2, 电动势系数=0.76 V/ rad·s-1。
本抑制策略中神经网络训练数据采用上一周期根据经验确定的k,k和k及控制系统中的rin, yout, error, 训练网络ANN2, 并相应更新ANN1。同时记录本周期的rin, yout, error,k,k,k, 用于下一周期的网络训练和PID控制。
图4记录的是在未加换相转矩波动控制时测得的转矩, 由图4可以看出, 转矩波动比较明显, 达到转矩平均值的33%。图5记录的是加入换相转矩波动控制时测得的转矩, 其波动大幅减小。
图6和图7验证了本抑制策略的控制效果。在负载突然增加时, 以前的控制模型不能适应新的环境, 通过在线学习, 重新估计参数, 修正控制模型, 使系统在短时间内达到新的平衡状态。在新的平衡状态和以前的平衡状态之间有一个过渡时间, 过渡时间的长短和网络学习的收敛速度有关, 网络收敛得越快过渡时间越短。在采用控制系统后, 样机的过渡时间缩短到了未采用时的1/4。
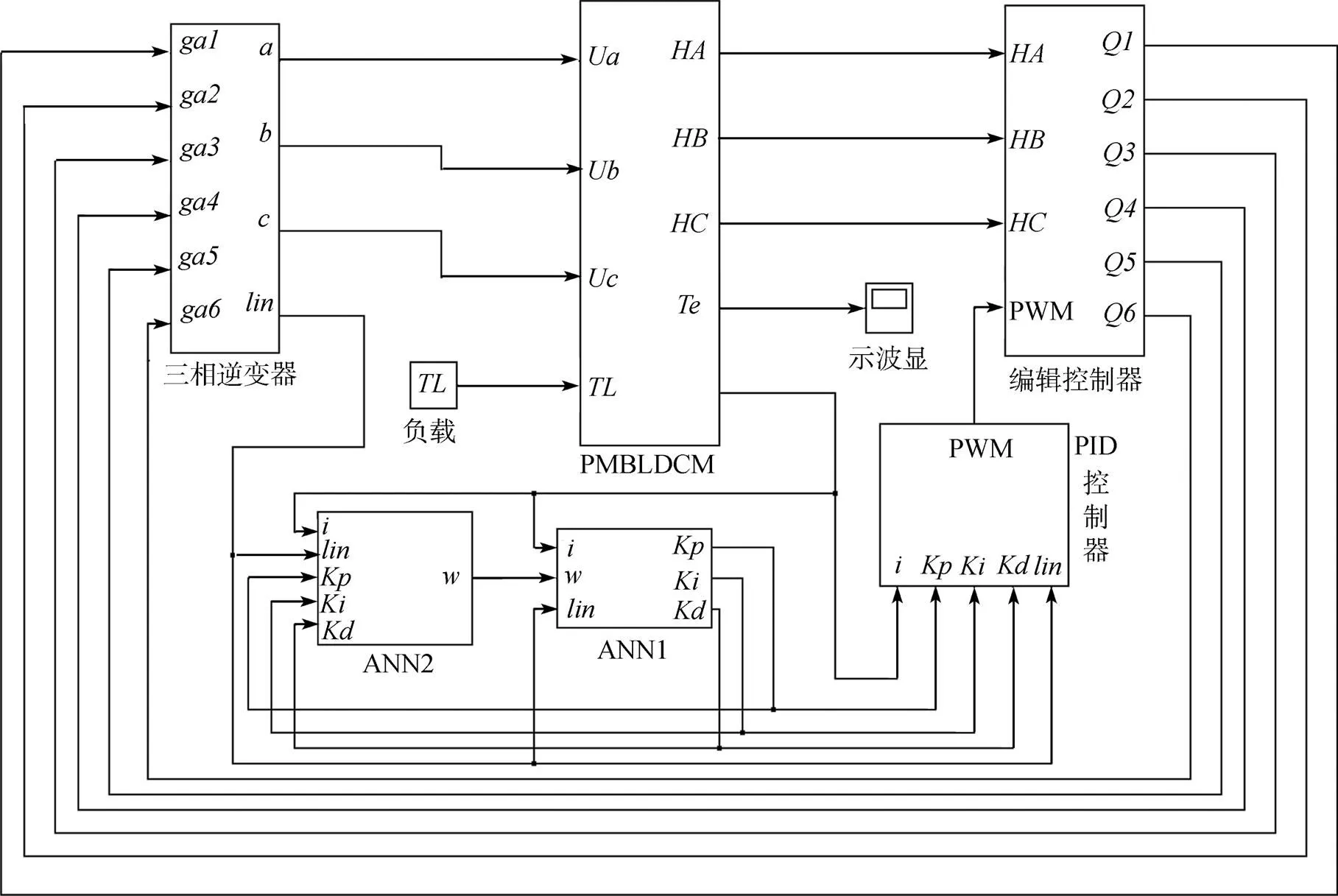
图3 在线智能PID控制系统模型
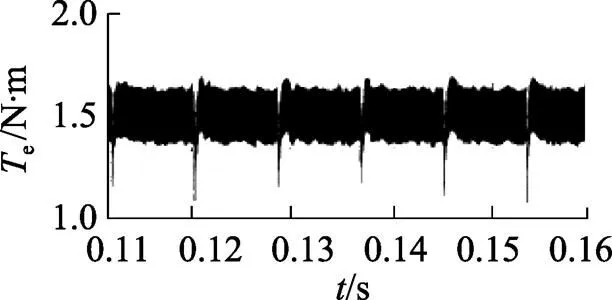
图4 未采用抑制策略转矩波形
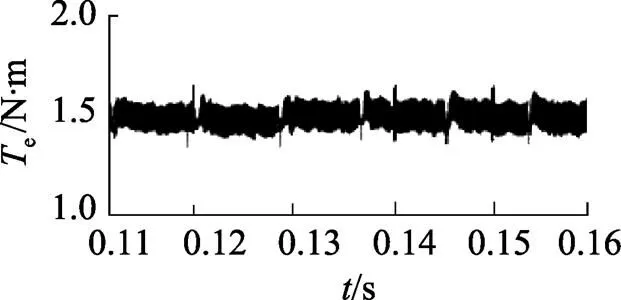
图5 采用抑制策略转矩波形
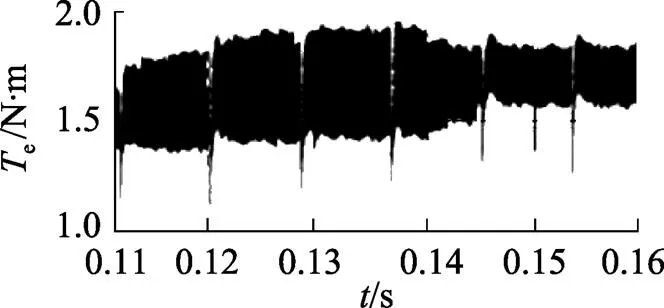
图6 未采用抑制策略的突加负载转矩波形
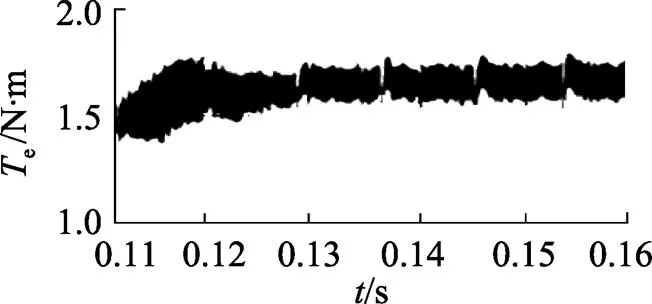
图7 采用抑制策略的突加负载转矩波形
4 结束语
本文在分析PMBLDCM特点及其在鱼雷动力系统领域使用现状的基础上, 充分发挥自校正调节器的优势, 结合PID控制设计了PMBLDCM的在线智能PID控制器。仿真结果表明, 在线智能PID控制器对PMBLDCM模型的负载扰动变化具有更强的适应性和鲁棒性,控制器算法简单,系统具有良好的动态响应性能, 降低了鱼雷PMBLDCM的噪声与振动, 提高了鱼雷武器系统的战技性能。
[1] Henderson J J R. Design of Brushless Permanent-magnet Motors [M]. Magna Physics Publishing and Clarendon Press Oxford, 1994.
[2] 纪志成, 姜建国, 沈艳霞. 永磁无刷直流电动机转矩脉动及其抑制方法[J]. 微特电机, 2003, (5): 33-35.Ji Zhi-cheng, Jiang Jian-guo, Shen Yan-xia. Review of Torque Ripple and its Suppression in Permanent Magnet Brushless DC Motor[J]. Small & Special Machines, 2003(5): 33-35.
[3] WonSeok O, Kim Y, Kim C, et al. Speed control of induction motor using genetic algorithm based fuzzy controller[C]// Proceedings of IEEE Industrial Electronics Society Confe- rence, San Jose, CA, 1999: 307-311.
[4] Parasiliti F, Petrella R, Tursini M. Torque Ripple Com- pensation in Permanent-Magnet Synchronous Motor Based on Kalman Filter[C]//Proceedings of IEEE Conference ISIE’99- Bled, Slovenia, 1999: 1333-1338.
[5] Lee C K, Kwok N M. Torque Ripple Reduction in BLDC Motor Velocity Control Systems using an Optimal Controller [C]//Proceedings of Electrical Machines and Drives Confe- rence, US, 1993: 600-605.
[6] 飞思科技产品研发中心. MATLAB6.5 辅助神经网络分析与设计[M]. 北京: 电子工业出版社, 2003.
[7] 徐艳平, 钟彦儒, 于宏全. 基于Matlab的永磁同步电机直接转矩控制的仿真建模[J]. 微电机, 2005, 38(3):27-30.Xu Yan-ping, Zhong Yan-ru, Yu Hong-quan. Simulation and Modeling of Direct Torque Control of Based on MATLAB[J]. Micromotors, 2005, 38(3): 27-30.
Modeling and Simulation of On-line Intelligent PID Controller for Torpedo PMBDCM
WANG Ding, XIE Shun-Yi, GUO Zhi-rong, ZHANG Lin-sen
(Department of Weaponry Engineering, Navy University of Engineering, Wuhan 430033, China)
An on-line intelligent proportional integral differential(PID)controller is proposed to suppress the torque ripple in permanent magnetic brushless DC motor(PMBDCM). A self-tuning regulator is established by employing artificial neural network, and combined with PID controller. The parameter of PID controller is tuned on-line to get the best control. Then, the model of on-line intelligent PID controller is built by Simulink. The simulation results show that the controller achieves better adaptability and robustness, moreover the system gains good dynamic performance.
torpedo; permanent magnetic brushless DC motor(PMBDCM); torque ripple; neural network; self-tuning regulator
TJ630.32; U664.34
A
1673-1948(2011)02-0124-05
2010-05-06;
2010-06-17.
王鼎(1983-), 男, 在读博士, 研究方向为鱼雷电动力推进技术.
(责任编辑: 陈 曦)
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
小哥白尼(军事科学)(2021年8期)2021-11-22
小哥白尼(军事科学)(2020年8期)2020-05-22
宇航计测技术(2018年3期)2018-09-08
舰船科学技术(2015年8期)2015-02-27
汽车与新动力(2015年1期)2015-02-27
海洋世界(2014年2期)2014-02-27
汽车与新动力(2014年6期)2014-02-27
汽车与新动力(2014年2期)2014-02-27
地震研究(2014年1期)2014-02-27