
探头自动起落控制在无缝管超声波检测中的研究
2011-05-11 02:48张文洁
制造业自动化 2011年1期
张文洁, 王 左
(辽宁科技大学,鞍山 114051)
探头自动起落控制在无缝管超声波检测中的研究
张文洁, 王 左
(辽宁科技大学,鞍山 114051)
0 引言
在无缝管超声波自动探伤过程中,由于探头数目较多(一般为8的倍数),因此在检测过程中,为了保证每个探头能够进行有效范围的检测,必须采用相应的控制措施保证探头能够依次起落,这样才能够控制扫描盲区(50mm以内)并符合自动化探伤的需求。探头自动起落控制属于电控的一部分,其基本原理是:计算机首先通过检测光电开关的信号,判断钢管是否进入探伤区,在固定的间隔内,得到水平行车的运行速度和距离,根据每个探头与光电开关的位置关系,判断探头的起与落。其工艺过程如图1所示:
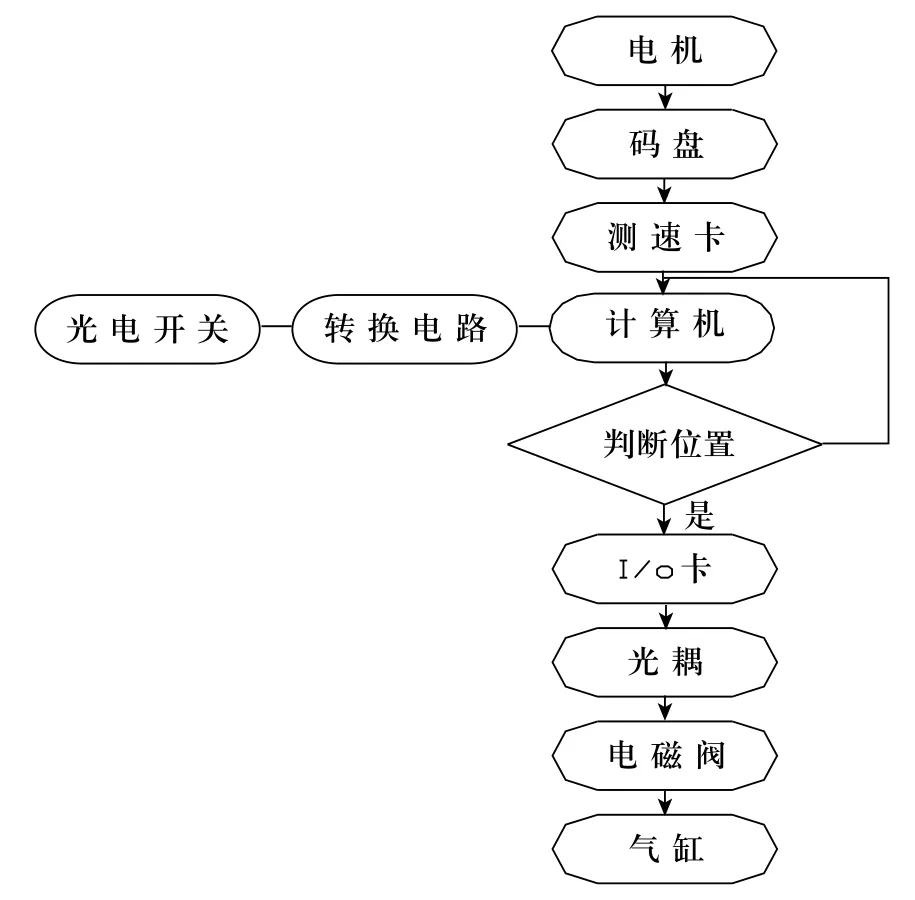
图1 探头起落控制工艺过程图
1 探头起落控制工艺过程分析
在实际应用中,判断钢管是否进入探伤区是由对射式光电开关所控制,对射式光电开关在通断的情况下分别有有+24v与0v两个电压值,通过转换电路的作用,转换为+5v与0v两个电压值,当钢管进入探伤区后遮住光电传感器,接收端不能得到光信号,计算机就得到一个低电平,反之计算机就得到一个高电平。经过这样的判断,可以确认钢管是否运行在探伤区,一旦钢管进入探伤区,通过监测行车的水平速度,不断的判断探头架上各组探头当前的运行位置,并根据各组探头与光电开关的实际距离,分别给出各组探头的落信号,控制探头的落动作。当钢管离开探伤区时,光电开关的接收断得到光信号,同时计算机检测各组探头与光电开关的位置,并根据各组探头与光电开关的实际距离,分别给出各组探头的起信号,控制探头的起动作。由于探头的起落过程中,针对每组探头,相差一个探头体的距离,因此,探头的起落控制距离是不一致的,所以要求在实际的应用中,分别给出各组探头的起落距离,如图2所示。
行车带动探头架的运动过程中,每组探头的起落位置的检测是由光电增量码盘来实现的,计算机在每个检测周期T=50ms内,就可以得到当前时间段内的行车运行距离ΔLi( 测速卡每读一次清零),则总的运行距离L为:


图2 探头起落位置示意图
计算机每次检测周期固定,为T=50ms,当计算机通过接口得到当前时刻行车的运行位移时,也可得到行车的运行速度Vi, 为以后的螺距控制提供依据。

根据光电开关提供的检测信息,不断判断L的距离,根据起落位置的不同要求,分别实现对各组探头的起落控制。
2 控制程序设计
计算机在进行信号采集之后,为了避免干扰,一般都进行相应的数字滤波预处理。预处理的主要任务是去除混杂在有用信号中的各种干扰信号,在设计中采用滑动平均滤波法。该方法采用循环队列作为采样数据存储器,队列长度为n,每进行一次新的采样,把采样数据放到队尾,扔掉原来队首的一个数据。这样,在队列中始终有n个最新的数据。对这n个最新数据求取平均值,作为此次采样的有效数据。这种方法每采样一次,便得到一个有效采样值,因而速度快,实时性好,对周期性干扰有良好的抑制作用。滑动平均滤波的流程图如图3所示:
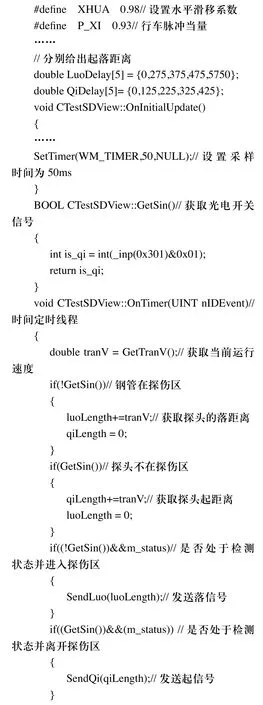
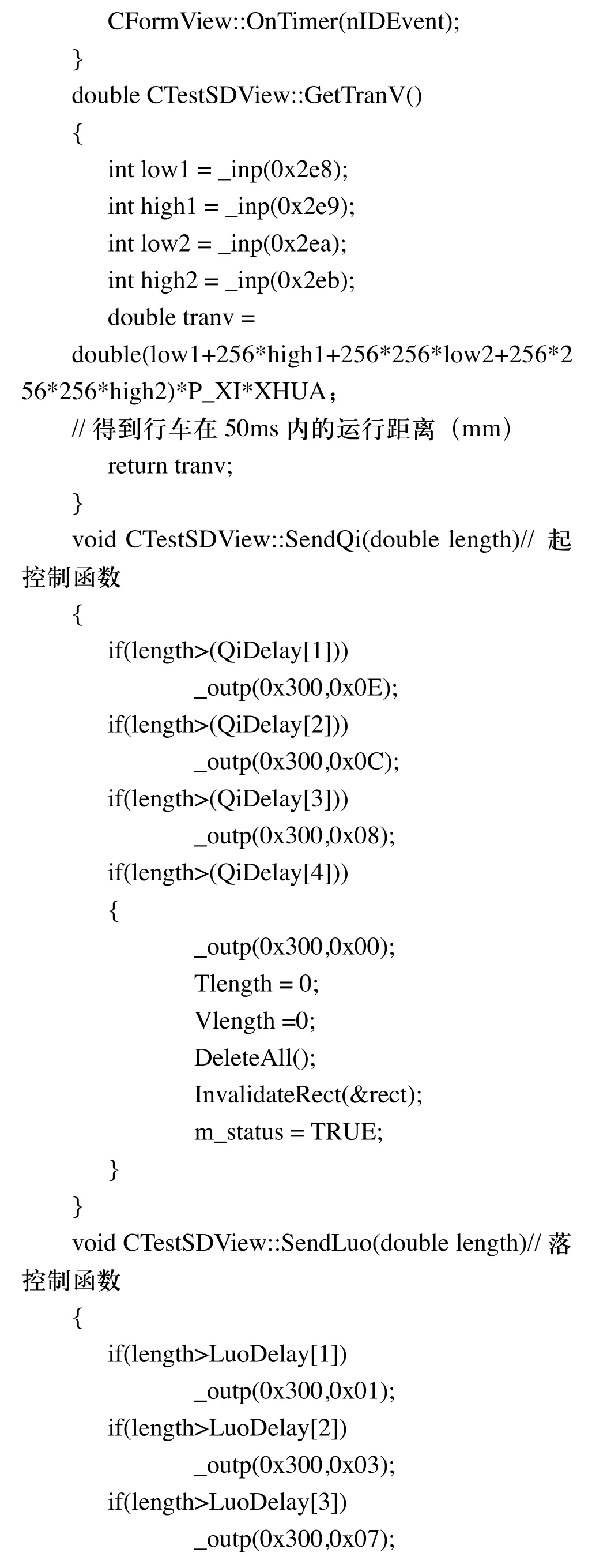
在实际应用中,取n=3,数据经过处理后,得到相应的行车运行速度,依据前面的分析,进行探头起落控制的程序流程图如图4所示:
本程序使用VC++6.0开发,部分程序及说明如下:
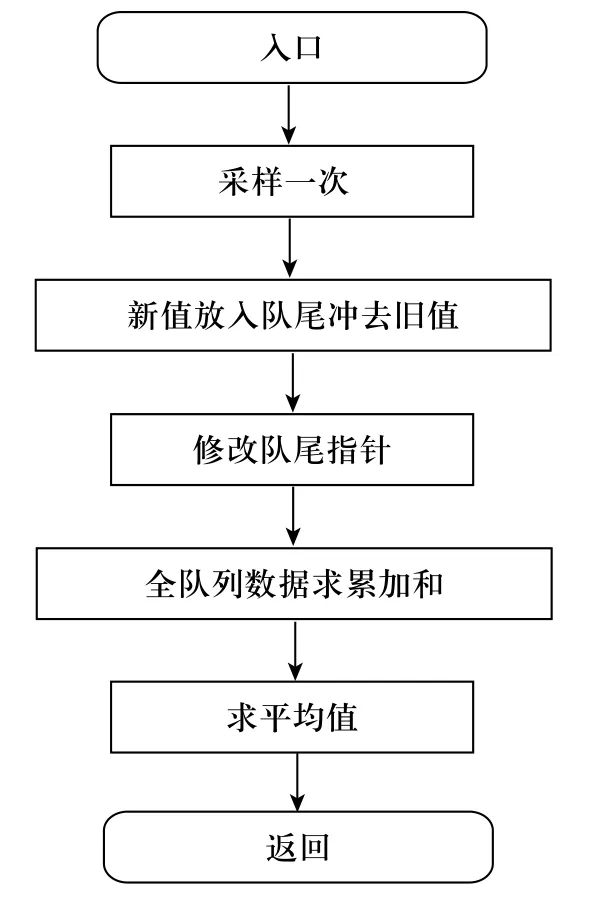
图3 滑动平均滤波流程图

图4 探头起落控制的程序流程图


3 结束语
针对探头的起落控制进行了分析,使扫描盲区在50mm能够很好的实现,但在实际的应用中,为了进一步减少其扫描盲区,必须考虑影响其起落位置的因素,主要有:
1)由于探头的起落靠气缸来执行,执行元件在得到起落信号后会有一个时间的延迟(0.2~0.4s,因探头与钢管的距离的不同而不同);
2)行车在运行中与轨道的打滑现象也对位置精度产生影响;
3)计算机的检测时间对位置精度的影响。
因此,为了更好的实现探头的起落控制,根据不同的现场情况,可适当的调整水平行车的滑移系数;在计算速度允许的情况下尽量缩短检测时间;在计算中充分考虑探头的起落时间。这样,能在原有的基础上能够进一步缩小检测盲区。
[1]王仲生, 无损检测诊断现场实用技术, 2002.
[2]谭浩强,C程序设计[M]. 清华大学出版社, 2003.
[3]向世明.Visual C++数字图象与图形处理[M]. 电子工业出版社, 2001.
[4]乔林,杨志刚.Visual C++数字图象与图形处理[M]. 中国铁道出版社, 1999.
Probe lifting control research based on seamless ultrasonic test
ZHANG Wen-jie, WANG Zuo
由于无缝管的广泛应用,对于无缝管自动超声检测的要求越来越高,而探头的自动起落是自动化探伤中的重要问题之一。为了保证每个探头能够进行有效范围的检测,减少其扫描盲区,设计考虑到执行元件得到起落信号的延迟、行车在运行中与轨道的打滑现象及计算机的检测时间对位置精度的影响等多种因素对其的影响并在程序中对其加以解决。
无缝管;探头;超声检测;起落
张文洁(1963-),女,辽宁鞍山人,副教授,硕士,主要从事机械电子、数控加工等方面的研究工作。
TP273
B
1009-0134(2011)1(上)-0015-04
10.3969/j.issn.1009-0134.2011.1(上).04
2010-07-21
猜你喜欢
趣味(数学)(2022年4期)2022-07-02
商品与质量(2020年33期)2020-11-07
铁道通信信号(2018年12期)2019-01-31
现代商贸工业(2018年31期)2018-12-08
资源再生(2017年4期)2017-06-15
中国卫生(2015年5期)2015-11-08
智富时代(2015年3期)2015-05-22
智富时代(2015年3期)2015-05-22
浙江共产党员(2014年12期)2014-07-10
现代电子技术(2014年5期)2014-03-12
