
基于单片机的步进机控制研究
2011-05-11 04:02常毅
制造业自动化 2011年9期
常 毅
(淄博职业学院,淄博 255314)
基于单片机的步进机控制研究
常 毅
(淄博职业学院,淄博 255314)
0 引言
步进电机又称为脉冲电动机或阶跃电动机,它是基于最基本的电磁感应作用,将电脉冲信号转变为角位移或线位移的开环控制元件。单片机控制的步进电机广泛地应用于工业自动控制、数控机床、组合机床、机器人、计算机外围设备、照相机,大型望远镜,卫星天线定位系统等等。随着经济的发展,技术的进步和电子技术的发展,步进电机的应用领域更加广阔,同时也对步进电机的运行性能提出了更高的要求。
1 步进电机概述
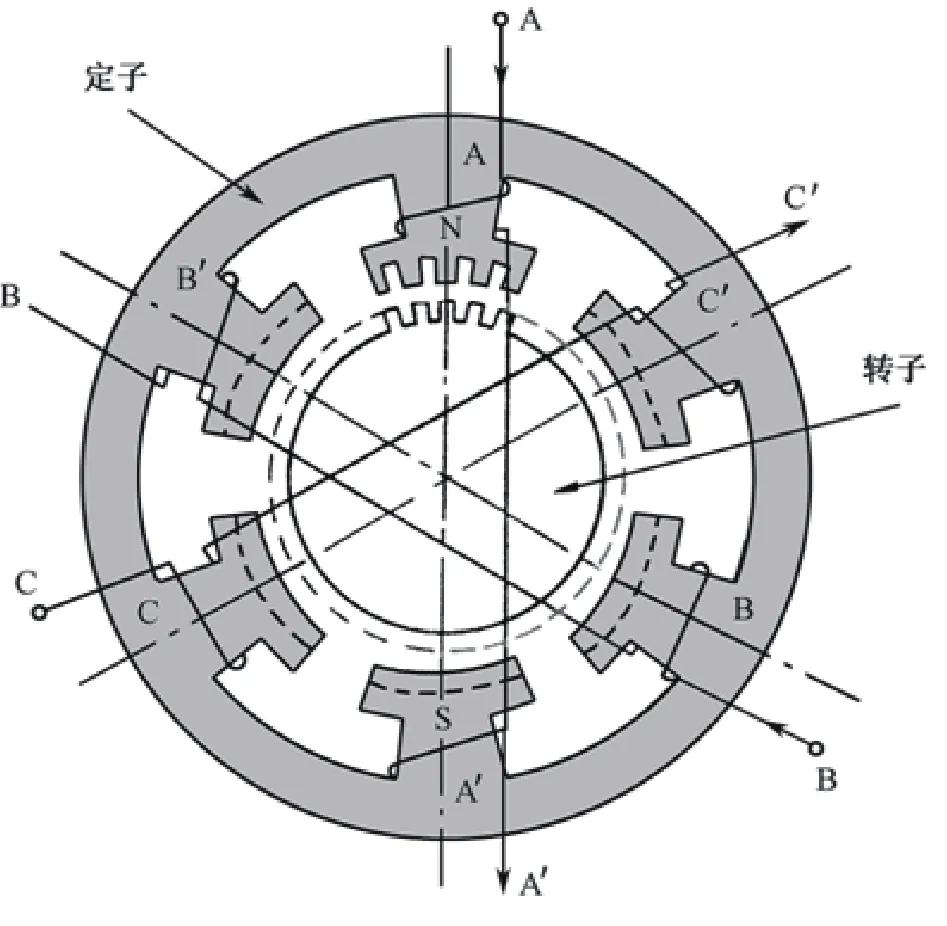
图1 步进电机内部结构图
步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。我们可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时我们也可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。其一般结构图如图1所示。
如图1所示,步进电机分为转子和定子两部分:
1)定子:由硅钢片叠成的,定子上有6大磁极,每2个相对的磁极(N,S)组成一对,共有3对。定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。 0、1/3π、2/3π,(相邻两转子齿轴线间的距离为齿距以π表示),即A与齿1相对齐,B与齿2向右错开1/3π,C与齿3向右错开2/3π,A'与齿5相对齐,(A'就是A,齿5就是齿1)。
2)转子:由软磁材料制成,其外表面也均匀地分布着小齿,与定子上的小齿相同,并且小齿的大小相同,间距相同。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。 本文就是在这个基础之上对其控制进行了深入的研究与设计。
2 步进电机的单片机控制
2.1 步进电机控制系统组成

图2 用单片机控制步进电机原理系统
与传统步进控制器相比较有以下优点:
1)用微型机代替了步进控制器把并行二进制码转换成串行脉冲序列,并实现方向控制。
2)只要负载是在步进电机允许的范围之内,每个脉冲将使电机转动一个固定的步距角度。
3)根据步距角的大小及实际走的步数,只要知道初始位置,便可知道步进电机的最终位置。
2.2 步进电机控制系统原理
2.2.1 脉冲序列的生成

图3 脉冲的生成
脉冲幅值:由数字元件电平决定。
TTL 0 ~ 5V
CMOS 0 ~ 10V
接通和断开时间可用延时的办法控制。以达到确保步进到位。
2.2.2 方向控制
步进电机旋转方向与内部绕组的通电顺序相关。 三相六拍,通电顺序为:
正转:A→AB→B→BC→C→CA
反转:A→AC→C→CB→B→BA
改变通电顺序可以改变步进电机的转向
2.2.3 脉冲分配
实现脉冲分配(也就是通电换相控制)的方法有两种,软件法和硬件法。
软件法:在电动机运行过程中,要不停地产生控制脉冲,占用了大量的CPU时间,可能使单片机无法同时进行其他工作(如监测等),所以,人们更喜欢用硬件法。
硬件法:实际上就是使用脉冲分配器8713,来进行通电换相控制。
8713是属于单极性控制,用于控制三相和四相步进电机,我们选择的是三相六拍工作方式。8713可以选择单时钟输入或双时钟输入,具有正反转控制、初始化复位、工作方式和输入脉冲状态监视等功能,所有输入端内部都设有斯密特整形电路,提高抗干扰能力,使用4~18V直流电源,输出电流为20mA。本例选用单时钟输入方式,8713的3脚为步进脉冲输入端,4脚为转向控制端,这两个引脚的输入均由单片机提供和控制,选用对三相步进电机进行六拍方式控制,所以5、6脚接高电平,7脚接地。
由于采用了脉冲分配器,单片机只需提供步进脉冲,进行速度控制和转向控制,脉冲分配的工作交给8713来自动完成,因此,CPU的负担减轻许多。
2.2.4 步进电机与微型机的接口电路
由于步进电机的驱动电流较大,所以微型机与步进电机的连接都需要专门的接口及驱动电路。驱动器可用大功率复合管,也可以是专门的驱动器。
总之,只要按一定的顺序改变8713脉冲分配器的 13脚~15脚 三位通电的状况,即可控制步进电机依选定的方向步进。由于步进电机运行时功率较大,可在微型机与驱动器之间增加一级光电隔离器(一是抗干扰,二是电隔离。)以防强功率的干扰信号反串进主控系统。
电路图如图4所示。
1)图中 K1、K2、K3、K4按钮分别控制步进电机正转、反转、加速、减速。
2)因为我们讨论的是三相六拍的工作方式,所以P0.4和P0.6接高电平,P0.7接低电平。
3)P0.0输出步进脉冲。
4)P0.1控制步进电机的转向。
3 步进电机的运行控制
3.1 步进电机的速度控制

图4 单片机与步进电机的接口电路
步进电机的速度控制是通过单片机发出的步进脉冲频率来实现,对于软脉冲分配方式,可以采用调整两个控制字之间的时间间隔来实现调速,对于硬脉冲分配方式,可以控制步进脉冲的频率来实现调速。控制步进电机的速度的方法可有两种:
1)软件延时法:改变延时的时间长度就可以改变输出脉冲的频率,但这种方法CPU长时间等待,占用大量的机时,因此没有实践价值。
2)定时器中断法:在中断服务子程序中进行脉冲输出操作,调整定时器的定时常数就可以实现调速,这种方法占有的CPU时间较少,在各种单片机中都能实现,是一种比较实用理想的调速方法。
定时器法利用定时器进行工作,为了产生步进脉冲,要根据给定的脉冲频率和单片机的机器周期来计算定时常数,这个定时器决定了定时时间,当定时时间到而使定时器产生溢出时发生中断,在中断子程序中进行改变P1.0的电平状态的操作,这样就可以得到一个给定频率的方波输出,改变定时常数,就可以改变方波的频率,从而实现调速。
3.2 步进电机的位置控制
步进电机的位置控制,指的是控制步进电机带动执行机构从一个位置精确地运行到另一个位置,步进电机的位置控制是步进电机的一大优点,它可以不用借助位置传感器而只需要简单的开环控制就能达到足够的位置精度,因此应用很广。步进电机的位置控制需要两个参数:
1)第一个参数:步进电机控制执行机构当前的位置参数(我们称为绝对位置),绝对位置时有极限的,其极限时执行机构运动的范围,超越了这个极限就应报警。
2)第二个参数:从当前位置移动到目标位置的距离 我们可以用折算的方式将这个距离折算成步进电机的步数,这个参数是外界通过键盘或可调电位器旋钮输入的,所以折算的工作应该在键盘程序或A/D转换程序中完成。
对步进电机位置控制的一般作法是:步进电机每走一步,步数减1,如果没有失步存在,当执行机构到达目标位置时,步数正好减到0,因此,用步数等于0来判断是否移动到目标位,作为步进电机停止运行的信号。
3.3 步进电机的加减速控制
步距角和转速大小不受电压波动和负载变化的影响,也不受各种环境条件诸如温度、压力、振动、冲击等影响,而仅仅与脉冲频率成正比,通过改变脉冲频率的高低可以大范围地调节电机的转速,并能实现快速起动、制动、正反转、加减速,而且有自锁的能力,不需要机械制动装置,不经减速器也可获得低速运行。它每转过一周的步数是固定的,只要不丢步,角位移误差不存在长期积累的情况,主要用于数字控制系统中,精度高,运行可靠。如采用位置检测和速度反馈,亦可实现闭环控制。
步进电机驱动执行机构从A点到B点移动的时,要经历升速,恒速,减速过程,如果启动时一次将速度升到给定速度,由于启动频率超过极限启动频率,步进电机就有失步现象,因此会造成不能正常启动,如果到终点时突然停下来,由于惯性作用 ,步进电机会发生过冲现象,会造成位置精度降低。如果升速非常缓慢的升降速,步进电机虽然不会发生失步和过冲现象,但影响执行机构的工作效率,所以,对步进电机的加减速要有严格的要求,那就是保证在不失步和过冲的前提下,用最快的速度(或最短的时间)移动到有可能指定位置。为满足加减速要求,步进电动机运行通常按照加减速曲线进行。加减速运行曲线没有一个固定的模式,一般根据经验和实验得到的。所以最简单的是匀加速和匀减速曲线。
其加减速曲线都是直线,因此容易编程实现。按直线加速时,加速度是不变的,因此要求转矩也应该是不变的。但是,由于步进电动机的电磁转矩玉转速时非曲线关系,因而加速度玉频率也应该是非曲线关系。因此,实际上当转速增加时,转矩下降,所以,按直线加速时,有可能造成因转矩不足而产生失步的现象。
采用指数加、减速曲线或S形(分段指数曲线)加、减速曲线是最好的选择。步进电机的运行可以根据距离的长短分如下3种情况处理:
1)短距离:由于距离较短,来不及升到最高速,因此,在这种情况下,步进电机以洁净启动频率运行,运行过程没有加、减速。
2)中、短距离:在这样的距离里,步进电机只有加、减速过程,而没有恒速过程。
3)中、长距离:在这样的距离里,步进电机不经有加、减速过程,而且还有恒速过程。
由于距离较长,要尽量缩短用时,保证快速反应性。因此,在加速时,尽量用接近启动频率启动,在恒速时,尽量工作在最高速。单片机在用定时器法调速时,用改变定时常数的方法来改变输入步进脉冲频率,达到改变转速的目的,对于MCS-51系列单片机,其定时器属于加1定时器。因此,在步进电机加速时,定时常数应增加;减速时,定时常数应减小。如果采用非线性加、减速曲线,要用离散法将加减速曲线离散化,将离散所得的转速序列所对应的定时常数序列,做成表格存储在程序存储器重。在程序运行中,使用查表得方式重装定时常数,这样做比;用计算机节省时间,提高系统的响应速度。
4 结束语
步进电机因其具有突出的优点,所以成了机电一体化的关键产品之一,广泛应用在各种自动化控制系统中。随着技术的发展,步进电机的设计要求也会不断加深,为此有必要让我们对其进行深入的研究。
[1]徐益民.步进电机的单片机控制系统的设计[D].哈尔滨:黑龙江科技学院,2005.
[2]张大朋.单片微机控制应用技术[M].北京:机械工业出版社,2006.
[3]Ki-Chae Lim,Jung-Pyo Hong,Gyu-Tak Kim,Characteristic Analysis of 5-phase Hybrid Stepping Motor Considering the Saturation of Both Teeth and Poles[M],0-7803-6401-5/00,2000 IEEE.
Based on SCM stepping machine control study
CHANG Yi
本文首先对步进机进行了深入的概述,然后给出了基于单片机的步进电机控制。通过采用单片机AT89C51和脉冲分配器PMM8713控制步进电机在三相六拍工作方式下的启停控制,正反转控制和加减速控制。最后对步进机的运行控制进行了详细的分析。
步进机;单片机;脉冲分配器
常毅(1961 -),女,山东蓬莱人,副教授,本科, 研究方向为机电控制技术。
TP273
A
1009-0134(2011)5(上)-0016-04
10.3969/j.issn.1009-0134.2011.5(上).06
2010-11-30
猜你喜欢
天然气与石油(2022年4期)2022-09-21
数学年刊A辑(中文版)(2021年1期)2021-06-09
奇妙博物馆(2021年4期)2021-05-04
小演奏家(2018年9期)2018-12-06
党的生活(黑龙江)(2017年10期)2017-11-09
新高考·高一物理(2016年3期)2016-05-18
油气田地面工程(2015年1期)2015-02-09
导航定位与授时(2014年2期)2014-04-27
云南中医学院学报(2012年3期)2012-07-31
中国造纸(2012年2期)2012-01-26
