
混合电动汽车轮系机构的介绍与运动分析
2011-05-10 11:05孙金风尹业宏
制造业自动化 2011年17期
孙金风,尹业宏,游 颖
(湖北工业大学 机械工程学院,武汉 430068)
0 引言
当前轮系机构除作为传统传动机构外,还在机器人机构和新型交通中开发应用,其中就有混合电动汽车传动机构的开发应用,混合电动汽车通常有两个动力源,一个是通常汽车所用的发动机(Engine),另一个是电动发动机(Electric Motor/Generator)。其中,Motor可以将电池储存的能量用来驱动汽车的低速行驶;在汽车加速或爬山时,可以同时运用Engine和Motor来驱动汽车;而在下坡或轻载时,Motor将Engine多余的能量发电并储存于电池中。这些工作模式在于对传动系统构件的控制来得到,可以想象,达到这一要求的且结构紧凑的传动机构只有复杂的轮系机构,文献[1~4]在这些方面做了大量研究工作,其中文献[1]通过理论和实验研究推出了一款混合电动汽车轮系机构,如图1所示。
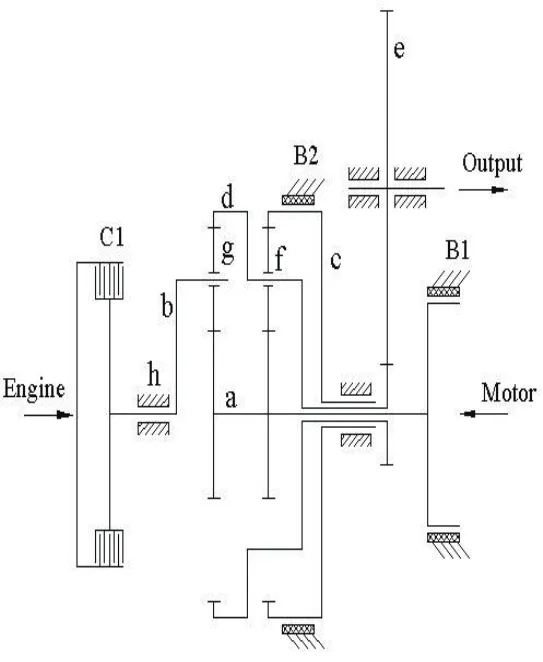
图1 混合电动汽车轮系机构

图2 模式1和模式6
1 轮系机构工作模式
此混合电动汽车轮系机构有6和工作模式,如表1所示,此表中C1、B1、B2表示离合器,“×”表示离合器合上。每一种工作模式的实际轮系机构图如图2~图6所示,为了方便进行分析,各图中不同构件号在不同图中可能表示相同的构件。
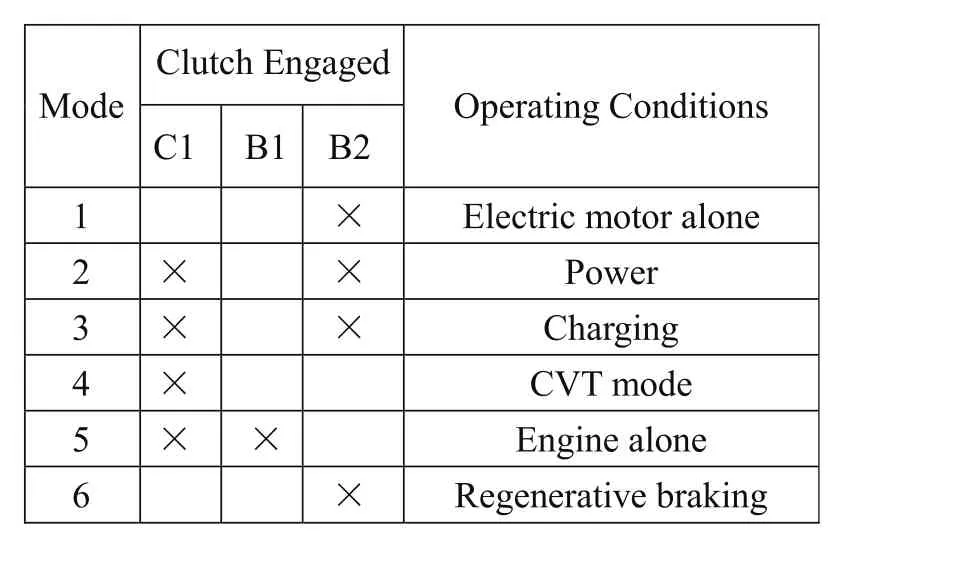
表1 图1所示齿轮传动机构的工作模式

图3 模式2
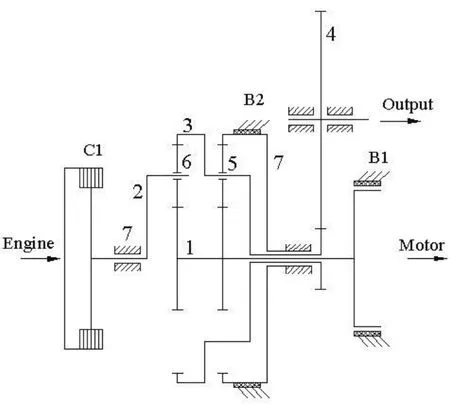
图4 模式3
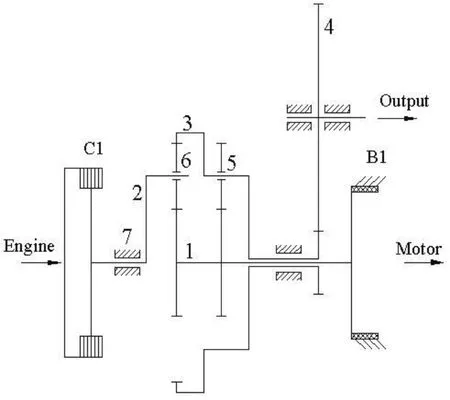
图5 模式4
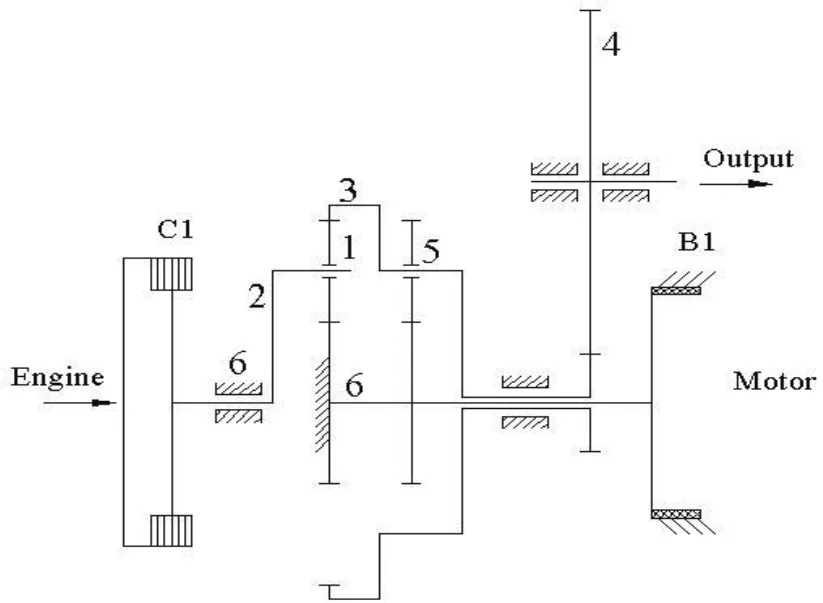
图6 模式5
模式1和模式6运用于汽车低速行驶和刹车的情况,此时只用Motor作为动力源来驱动汽车;模式2运用于汽车加速或爬山行驶的情况,此时同时用Engine和Motor来驱动汽车;模式3和模式4运用于汽车下坡或轻载、中速或高速平稳行驶的情况,此时用Engine作为动力源来驱动汽车,同时将多余的能量传递给Motor(此时Motor作为发电机发电并将能量储存于电池中);模式5运用于汽车高速非平稳行驶的情况,此时只用Engine作为动力源来驱动汽车,同时将Motor固定在机架上来节约能源。
2 运动分析
下面就模式2来进行轮系机构的运动分析。此时轮系基本回路单元组[5]为,
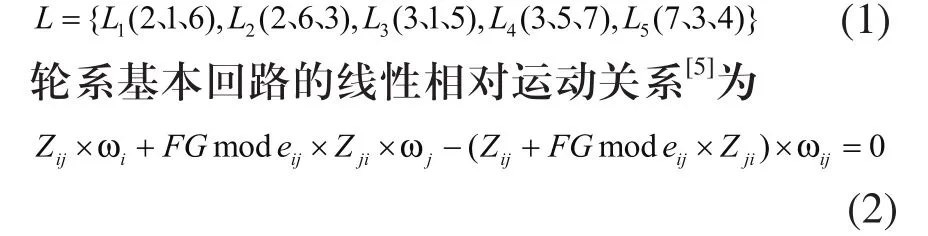
其中,Zij和Zji分别为i、j齿轮构件啮合处i和j构件的齿轮齿数;FGmodeij=1为i、j齿轮构件的啮合模式,外啮合时FGmodeij=1,内啮合时FGmodeij=-1;ωij为i、j齿轮构件所组成的轮系基本回路单元中的系杆转速。
模式2下轮系机构各基本回路单元的线性方程组为:

假定该轮系机构的参数为Z15=Z16=42、Z61=Z63=26、Z51=Z57=26、Z36=Z75=94、Z34=25、Z43=89。模式2时,1和2构件为输入力矩构件,4构件为输出力矩构件;假定1构件的输入转速大小为7771r/min,2构件的输入转速大小为4058r/min。求解(3)式可得该轮系机构的运动分析结果:1构件的转速大小是7771.00000r/min,2构件的转速大小是4058.00000r/min,3构件的转速大小是2399.58715r/min,4构件的转速大小是-674.04133r/min,5构件的转速大小是-6276.57692r/min,6构件的转速大小是-1938.86169r/min,7构件的转速大小是0.00000 r/min;即ωa=7771r/min,ωb=4058r/min,ωc=0r/min,ωd=2400r/min,ωe=-674r/min,ωf=-6277r/min,ωg=-1939r/min,ωh=0r/min。该结果与文献[1]中的计算结果一致。
同理,可以知道其他模式下,该混合电动汽车轮系的运动分析结果。
3 结束语
以上介绍和分析计算过程有利于深入研究混合电动汽车轮系机构,为分析和开发新型轮系机构提供一定的参考。
[1] L.W.Tsai,1996,Design of a Power Regulating Gearbox for Parallel Hybrid Electric Vehicles,Technical Research Report,Institute for Systems Research.
[2] Severinsky,A.J.,1994,Hybrid Electric Vehicle,United States Patent No.5343970.
[3] Eller,1990,United States Patent No.4923025.
[4] Berman,B.,Gelb,G.H.,Richardson,N.A.,and Wang,T.C.,1973,Power Train Using Multiple Power Sources, United States Patent No.3732751.
[5] 朱建霞,邓群,饶建华.计算机平面轮系机构结构和运动分析[J].机械研究与应用,2001,14(3):16-17.
猜你喜欢
能源工程(2022年2期)2022-05-23
内燃机工程(2021年6期)2021-12-10
房地产导刊(2021年11期)2021-11-27
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
制造技术与机床(2017年7期)2018-01-19
制造技术与机床(2017年3期)2017-06-23
现代商贸工业(2016年9期)2017-01-07
今日教育·幼教金刊(2016年11期)2016-12-23
陶瓷学报(2015年4期)2015-12-17
