
高速列车异步牵引电机直接磁场定向控制研究
2011-05-04 03:39:22任晋旗葛琼璇
铁道机车车辆 2011年2期
任晋旗,葛琼璇,马 逊,赵 鲁
(中国科学院 电工研究所,北京100190)
异步电机具有结构简单、坚固耐用、维护量小,机械转矩特性好等优点,在高速列车牵引传动系统中得到广泛应用。异步电机的控制属于交流传动技术领域,20世纪70年代之后,交流传动技术得到快速发展,电力电子功率转换器件以及控制系统软硬件技术取得很大进步,出现多种先进的交流电机控制策略,如滑差频率控制、磁场定向控制、直接转矩控制。这些控制策略都是基于稳态或者动态的电机数学模型,对电机实行闭环控制,使电机的运行特性大为提高。
磁场定向控制技术又称为矢量控制,基于坐标变换原理,通过调节电机电压的相位、频率、幅值,直接控制电机的电流、励磁与转矩水平,使电机电流的励磁与转矩分量之间解耦,电机动静态特性良好,利于进行车辆黏着控制,适合高速大功率电机的牵引与电制动控制,是当前牵引传动领域的主流技术之一。
磁场定向控制的原理最早由西门子公司的F.Blaschke于1971年提出,一般可以分为直接法和间接法两类:间接磁场定向控制利用动态滑差频率与转子转速相加得到同步频率,积分后得到转子磁链的角度;直接磁场定向控制利用磁链观测器对电机磁链进行实时计算,然后通过坐标转换进行控制。磁链观测器包括电压型、电流型以及混合型,按结构可以分为开环和闭环形式,其性能直接影响磁场定向的准确度以及电机的控制特性。
参数偏差对磁链观测的精度影响很大,当电机运行时,由于温升与磁饱和、集肤效应等因素,电机参数往往发生很大变化,严重影响磁链观测器的精度和效果。文献[1]采用频率响应函数对各类磁链观测器的准确度以及参数鲁棒性进行了详细分析,认为磁链观测器对于磁链角度观测的准确度优于对磁链幅值的观测。文献[2]介绍和比较了基于磁链观测器的直接磁场定向控制技术。文献[3]介绍了直接磁场定向控制技术在高速列车牵引控制系统中的工程应用。
国内多型高速动车组及机车牵引系统中采用了转子磁场定向控制技术,比如CRH1型、CRH2型、CRH3型动车以及部分机车。本文针对直接转子磁场定向控制中的磁链观测器进行深入全面的分析研究,以某型动车组用牵引电机为例,分析了磁链观测器准确度及对参数变化的敏感性,设计了用于高速列车牵引控制的磁链观测器。通过仿真实现了基于混合磁链观测器的直接磁场定向控制,仿真结果表明,设计的磁链观测器准确,实现了牵引电机的解耦控制。
1 磁链观测器特性分析
进行磁链观测器分析,首先建立电机的数学模型,以复相量表示的静止坐标系电机数学方程形式简单,而且便于进行频响函数的推导与分析。电机的各变量采用复相量形式表达,形如 fdqs=fds+j◦fqs,比如电机
电机电压方程表示为

磁链方程为

方程(1)、(2)、(3)表示了电机的数学模型。公式中,为dq坐标系定子电压相量为dq坐标系定、转子电流相量;r为 dq坐标系定、转子磁链相量;rs、rr为定转子电阻;Ls、Lr、Lm为定转子及励磁电感为电机转速(角频率);p为微分算子;j为复算子。
根据公式(1)~(3),可以推导不同的磁链观测器方程,根据输入电流进行计算的是电流型磁链观测器,根据电压计算的是电压型磁链观测器以及混合型磁链观测器。由于电机运行参数会发生变化,比如运行中电机温度升高使定子、转子电阻阻值发生变化,电机励磁电感存在非线性特性,而且电机参数本身测量存在误差,都会导致控制器中的磁链观测不准确,影响控制效果。下面基于频响函数对各类磁链观测器的特性进行分析。
(1)电流型磁链观测器
根据公式(2)和(3)可以推导得到电流型磁链观测器公式为

式(4)中的观测器所用参数与磁链、电流等变量的顶部以上标“∧”表达,下文中实际电机的参数与变量均不加上标,以示区分。实际电机的转子磁链以电流型观测器的形式表达如下式:

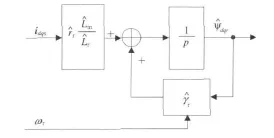
图1 电流型磁链观测器方框图
根据式(4)与(5)可以推导磁链观测器的传递函数为
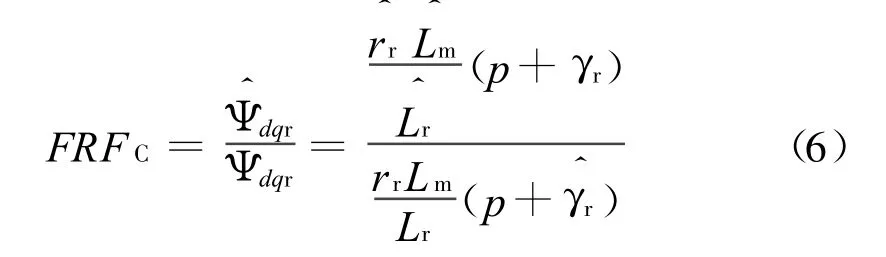
对公式(6)进行频率响应函数(FRF)分析,能够得到电机参数对磁链观测准确度的影响,以及在不同速度下观测器的工作性能,幅频函数能够表明观测磁链与实际磁链的幅值偏差,相频函数则表明二者相位之差,也就是观测磁链角度的偏差。
将式(6)中的算子p以稳态激励频率j◦ωe表达,ωe为电机供电角频率。式(6)推导为
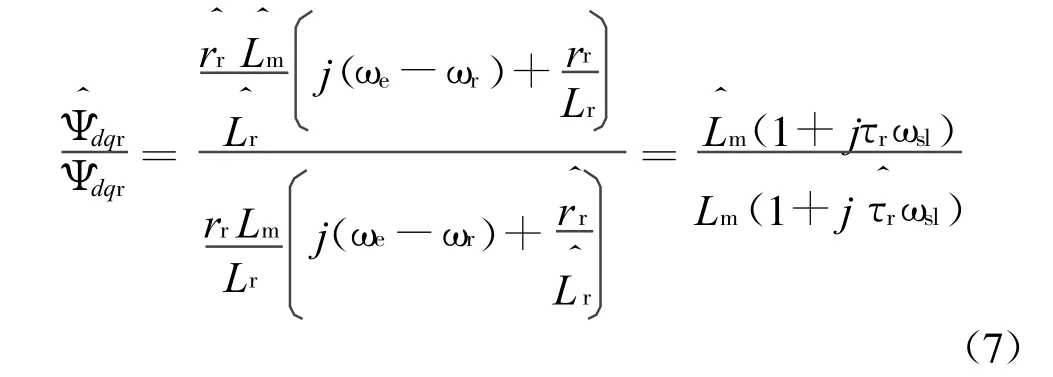
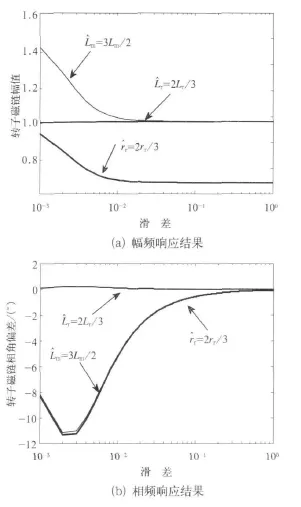
图2 电流型磁链观测器的FRF分析
图2表示了电流型磁链观测器的参数与实际电机参数不同时对频响函数特性的影响,包括励磁电感Lm、转子电阻 rr、转子漏感 Lr等。由图2(a)可见,在不同滑差范围,观测器受参数影响的规律不同,由于基频为电机额定频率,则等同于不同电机转速的观测器特性差异:滑差大、速度低时转子电阻偏差对观测磁链幅度的误差影响较大,高速时较小。相反地,滑差小、速度高时励磁电感偏差对观测磁链幅度的误差影响较大,低速时较小。由图2(b)相频响应可见,励磁电感、转子电阻偏差对磁链角度偏差的影响较大,但随滑差增大影响相应削弱。
(2)电压型磁链观测器(图3)
由公式(1)和(3)可以推导电压型磁链观测器方程:

经过推导,可以得到

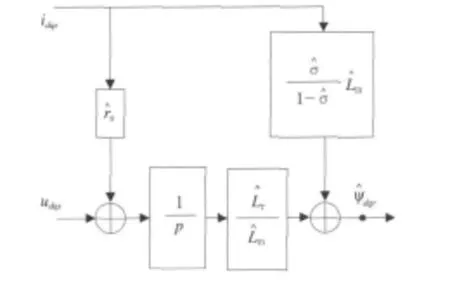
图3 电压型磁链观测器方框图
对公式(10)进行频率响应函数分析,结果如图4所示。与电流型磁链观测器不同,频响函数中,滑差频率l与电机角频率 ωe均是变量,为便于分析,而且由于磁场定向控制下,电机牵引阶段的滑差基本保持固定,所以选取额定滑差频率,对不同速度下的响应函数进行计算分析。
图4表示了电压型磁链观测器参数定子电阻rS、励磁电感Lm、定子漏感Ls、转子漏感Lr与实际电机参数发生偏差对观测器幅频相频特性的影响。由图4a可知,速度低时定子电阻偏差对观测磁链幅度的影响较大。其它参数的偏差在全速度范围内对观测磁链的幅度影响都不大。由图4(b)可见,定子电阻对磁链角度准确度的影响较大。
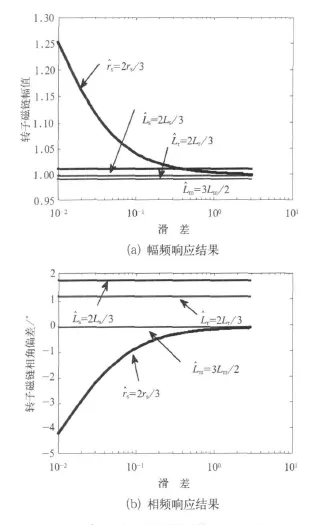
图4 电压型磁链观测器的FRF分析
(3)闭环混合磁链观测器
电流型磁链观测器不受定子电阻影响,而电压型磁链观测器在低速时受定子电阻影响,受其他参数影响较小。因此这两种观测器具有一定的互补性,将二者结合建立混合型的磁链观测器,并且引入闭环校正环节,能够取得良好的观测效果。3型车的牵引电机控制即采用这一类型观测器。
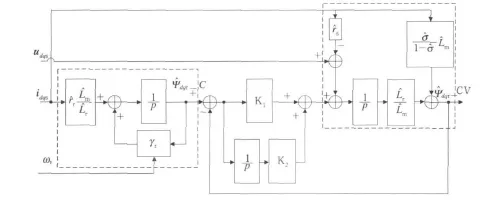
图5 混合型闭环磁链观测器
混合型闭环磁链观测器如图5所示,令电流模型观测器单独作用求得磁链为c;令电压电流混合模型磁链观测器作用求得磁链为;PI调节器输入的磁链偏差为这一偏差输入电压模型,对电压模型进行校正,在这一结构新构成的电压模型中,计算磁链的反电势项中除原先的电压积分外,增加了一项kΔ,即根据电压模型计算转子磁链为

将磁链偏差代入上式得:

实际电机的磁链可表达为

推导可得

相应地,实际磁链表达式为

公式(16)就是混合型闭环磁链观测器的传递函数公式,对其进行计算可得到幅频、相频响应结果如图6所示。
图6中表示了磁链观测器参数定子电阻rS、转子电阻rr、励磁电感Lm、转子漏感Lr与实际电机参数发生偏差对观测器的幅频、相频特性的影响。由图6(a)、图4(a)、图2(a)可见,低速时,定子电阻的偏差造成磁链幅值偏差很小,对比图6(b)、图 4(b)、图2(b)可见,全速度范围内,定子电阻造成的相角偏差很小,转子电阻、励磁电感的偏差造成的观测器相位偏差也减小了。FRF分析表明,混合型磁链观测器结合了电压型、电流型两种观测器的优点,取得了较好的观测效果,适合用于直接磁场定向控制系统中。
2 直接磁场定向控制系统的仿真实现与分析
基于混合型磁链观测器进行磁链观测,就能够实现直接磁场定向控制。在Matlab/Simulink中进行仿真研究,Simulink中的电机模型能够输出实际的磁链角度和幅值,便于对比磁链观测器计算磁链的准确度。仿真系统如图7所示。给定转矩,经励磁/转矩电流给定环节输出励磁和转矩电流分量I*d,I*q,分别与实际电流Id,Iq计算差值,通过两个PI调节器进行闭环控制,输出给定电压分量,经dq/α β旋转坐标变换输出至PWM调制逆变器,输出驱动电机运行。磁链观测器接收电机电压uab、ubc,电流Ia,Ib、转速ωr的测量信号,经计算得到磁链 角度 θr,送往 dq/α β 与 α β/dq坐标变换环节进行转换。这一仿真模型基本实现了直接磁场定向控制系统。仿真模型中,磁链观测器的电机参数,包括定转子电阻、励磁电感等与电机实际参数不同。仿真验证电机加速牵引过程中参数偏差对磁链观测器参数的影响。仿真电机参数(励磁电感Lm=0.053;转子漏感Lr=0.001 8;定子漏感Ls=0.001 2;转子电阻rr=0.066;定子电阻rs=0.107)的定转子电阻增加50%,励磁电感下降10%,其他参数不变。
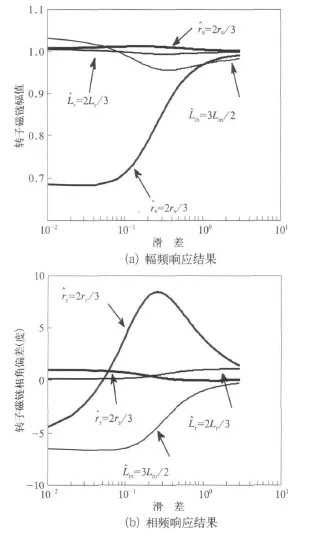
图6 混合型闭环磁链观测器的FRF分析
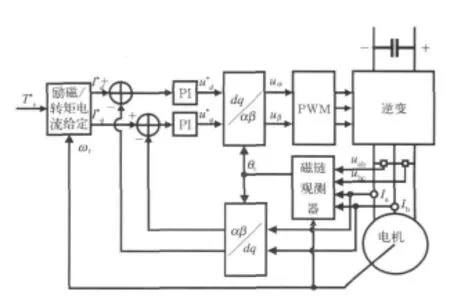
图7 电机直接磁场定向控制系统
仿真结果如图8所示。图8中从上至下分别为观测器磁链角度、实际电机磁链角度以及两者之间的偏差。由图8可见,观测磁链角度与实际电机磁链角度基本一致,误差小于10°,磁场定向效果良好。
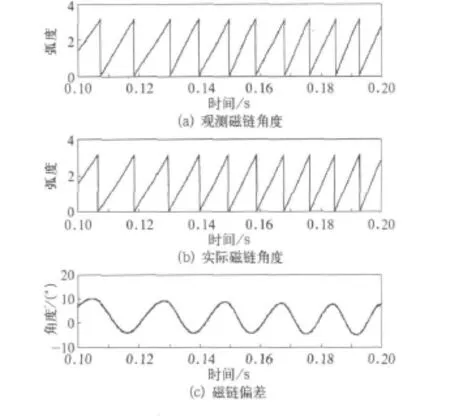
图8 直接磁场定向磁链观测器仿真结果
3 结论
通过对直接磁场定向控制系统中的电压型、电流型以及混合闭环磁链观测器进行频率响应函数分析,表明电流型观测器不受定子电阻影响,而电压型观测器低速时受定子电阻影响较大,但不受观测器转子偏差影响,混合型磁链观测器结合两者优点,通过反馈闭环,较准确地计算了磁链角度,参数鲁棒性较强,适合应用于直接磁场定向控制系统中。通过仿真得到了验证。在进一步的工程化实现中,需要解决准确的电压、电流测量处理方法,克服低开关频率、高电流谐波对电机控制特性影响等问题。
[1] P.L.Jansen,R.D.Lorenz A Physically Insightful Approach to the Design and Accuracy Assessment of Flux Observers for Field Oriented Induction Machine Drives[J].IEEE Trans on Industry Applications,Vol.30,No.1,Jan/Feb 1994.101-110.
[2] P.L.Jansen,R.D.Lorenz,D.W.Novotny Observer-Based Direct Field Orientation:Analysis and Comparison of Alternative Methods[J].IEEE Trans on Industry Applications.Vol.30,No.4 Jul/Aug 1994:945-953.
[3] W.D.Weigel,D.C.Horstmann.未来机车动车的SIBAS32微机控制系统(上)[J].国外内燃机车.1993,(7):33-40.
[4] W.D.Weigel,D.C.Horstmann.未来机车动车的SIBAS32微机控制系统(下)[J].国外内燃机车.1993,(8):41-48.
猜你喜欢
当代陕西(2022年6期)2022-04-19 12:11:54
娃娃乐园·综合智能(2021年12期)2022-01-18 05:46:42
中学生数理化·高二版(2016年12期)2017-02-28 10:08:42
电测与仪表(2016年10期)2016-04-12 00:26:38
Coco薇(2016年1期)2016-01-11 16:53:24
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电测与仪表(2015年19期)2015-04-09 11:32:56
