汽轮机TSI系统的原理与应用
2011-04-21 02:30:06张亮
东北电力技术 2011年2期
张 亮
(东北电力科学研究院有限公司,辽宁 沈阳 110006)
随着机组容量的不断扩大,蒸汽参数越来越高,热力系统也越来越复杂。为了确保汽轮机的安全运行,在汽轮机上都装有各种类型的安全保护装置,以便对各种重要热工参数、振动和位移等进行连续监视和保护,以便在机器严重受损之前,预警事故先兆,并在事故即将发生之时关闭系统,从而大大提高了设备的安全使用程度。因此,汽轮机安全监视及保护系统(TSI)是一种集监测和保护功能于一体的系统,是大型旋转机械必不可少的装备。
TSI系统主要由传感器及智能板件组成。传感器是将机械振动量、位移、转速转换为电量的机电转换装置。根据传感器的性能和测试对象的要求,利用电涡流传感器,对汽轮机组的转速、偏心、轴位移、轴振动、胀差进行测量;利用速度传感器对盖振进行测量;利用线性可变差动变压器(LVDT)对热膨胀进行测量。另外,还可利用差动式磁感应传感器来测量机组的转速,其中涡流传感器在汽轮机的安全监控中发挥了重要作用。
1 电涡流传感器
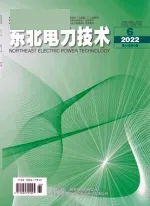
电涡流传感器是通过传感器端部线圈与被测物体(导电体)间的间隙变化来测物体的振动相对位移量和静位移的,它与被测物之间没有直接的机械接触,具有很宽的使用频率范围(0~10 Hz)。电涡流传感器的变换原理是传感器的端部有一线圈,线圈通以频率较高(一般为1~2 MHz)的交变电压(见图1),当线圈平面靠近某一导体面时,由于线圈磁通链穿过导体,使导体的表面层感应出一涡流ie,而ie所形成的磁通链又穿过原线圈,这样原线圈与涡流“线圈”形成了有一定耦合的互感,最终原线圈反馈一等效电感。而耦合系数的大小又与二者之间的距离及导体的材料有关,当材料给定时,耦合系数K1与距离d有关,K=K1(d),当距离d增加,耦合减弱,K值减小,使等效电感增加,因此,测定等效电感的变化,也就间接测定d的变化。
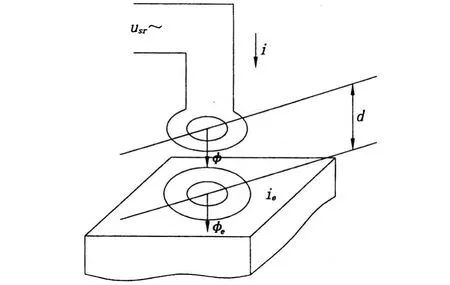
图1 涡流传感器原理简图
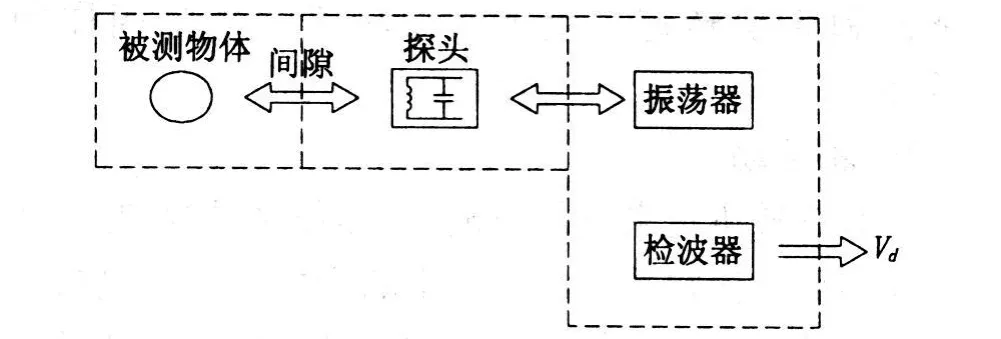
图2 前置器原理简图
由于传感器反馈回的电感电压有一定频率(载波频率)的调幅信号,需检波后才能得到间隙随时间变化的电压波形。根据以上原理,为实现电涡流位移测量,必须有一个专用的测量路线。这一测量路线(简称前置器)应包括具有一定频率的稳定的振荡器和一个检波电路等。涡流传感器加上一测量线路(前置器),如图2所示。从前置器输出的电压Vd是正比于间隙d的电压,可分两部分:一部分为直流电压Vde,对应于平均间隙(或初始间隙),另一部分为交流电压Vac,对应于振动间隙。
2 传感器安装与测量
2.1 转速及零转速
转速值显示是汽轮机组开车、停车以及稳定运行时的重要参数,振动值与机器转速的相关性对最终分析机器性能十分重要。例如:在机器停车过程中,转速突然下降,会意味着机器内部存在着大面积的金属摩碰。而零转速是预先设定的轴旋转速度,当运行的机器需停车时,机器转速达到零转速设置点,继电器触点动作,使盘车齿轮啮合,使轴持续慢速旋转,来防止轴产生弯曲,以避免在接踵而来的开车中由于轴弯曲对机器造成损坏。
测量链由2只装于前箱正对齿盘的传感器和板件组成,如图3所示。当机器旋转时,齿盘的齿顶和齿底经过探头,探头将周期地改变输出信号(脉冲信号),板件接收到此脉冲信号进行计数、显示,与设定值比较后,驱动继电器接点输出。
2.2 超速保护
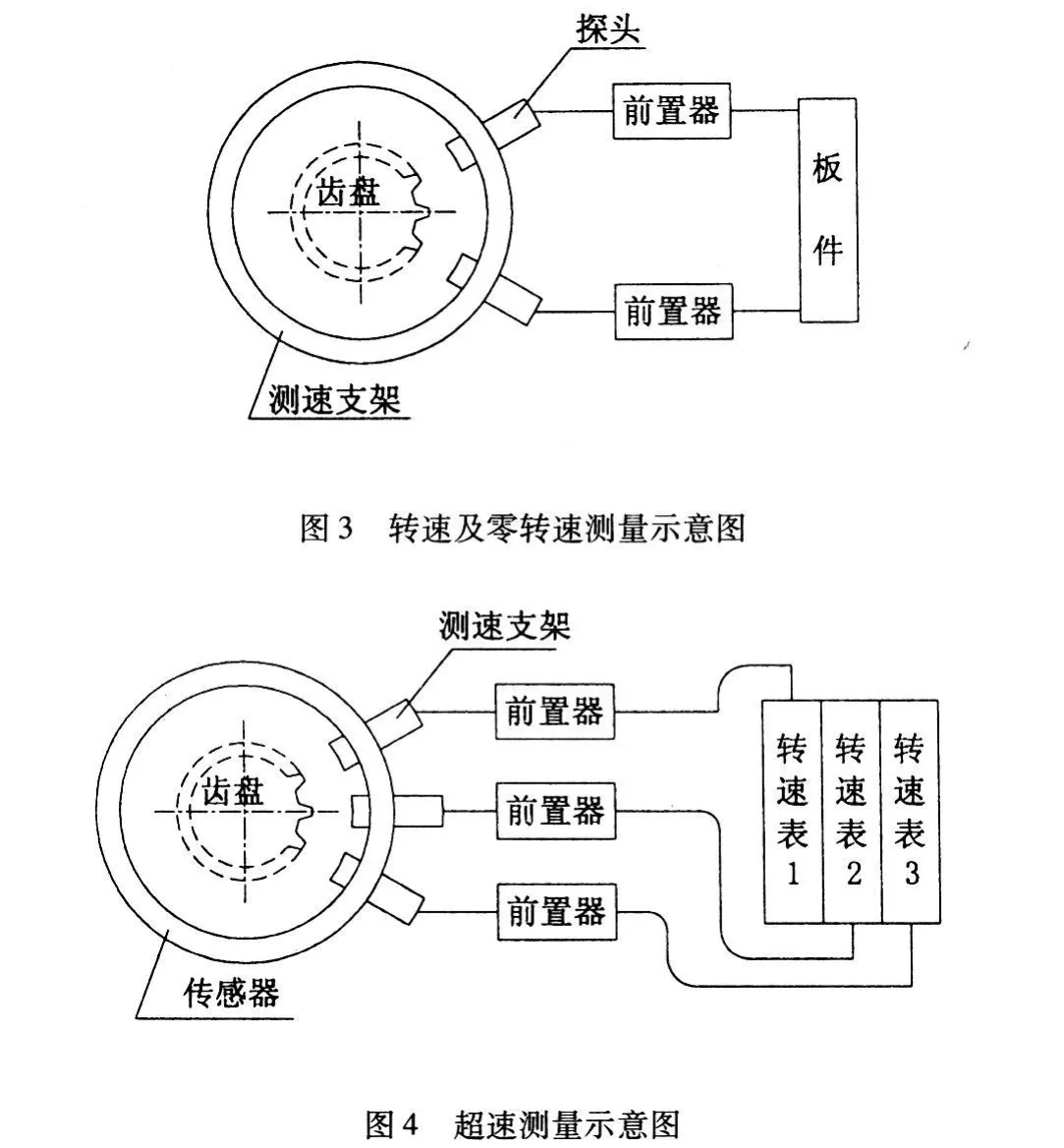
火力发电机组超速是最危险的情况之一,如不加以控制,会造成机组重大事故,导致飞车的危险。最坏的超速情况之一是机组甩负荷时,造成转速飞升。机组甩负荷时转速飞升小于108%额定转速,否则应自动打闸停机。根据美国石油学会标准API612要求,超速保护应具有快速响应和错误冗余表决逻辑,因此本测量链采用“三取二”方式,如图4所示。由3只装于前箱正对于齿盘的涡流传感器和3块转速表组成,与转速测量是同样的道理。
2.3 轴振动
对旋转机械来说,衡量其全面的机械情况,转子径向振动振幅是一个最基本的指标,很多机械故障,包括转子不平衡、不对中、轴承磨损、转子裂纹以及摩擦等都可以根据振动的测量进行探测。转子是旋转机械的核心部件,旋转机械能否正常工作主要决定于转子能否正常运转。当然,转子的运动不是孤立的,它是通过轴承支承在轴承座及机壳与基础上,构成了转子—支承系统。一般情况下,油膜轴承具有较大的轴承间隙。因此轴颈的相对振动比之轴承座的振动有显著的差别。特别是当支承系统(轴承座、箱体及基础等)的刚度相对比较硬时(机械阻抗较大),轴振动可以比轴承座振动大几倍到几十倍,由此,大多数振动故障都直接与转子运动有关。因此从转子运动中去监视和发现振动故障,比从轴承座或机壳的振动提取信息更为直接和有效。所以,轴振动的测量对机器故障诊断是非常有用的。在测量轴振时,常常把涡流探头装在轴承壳上,探头与轴承壳变为一体,因此所测结果是轴相对于轴承壳的振动。由于轴在垂直方向与水平方向并没有必然的内在联系,即在垂直方向(Y方向)的振动已经很大,而在水平方向(X方向)的振动却可能是正常的,因此,在垂直与水平方向各装一个探头。由于水平中分面对安装的影响,实际上两个探头安装保证相互垂直即可,如图5所示。当传感器端部与转轴表面间隙变化时,传感器输出一交流信号给板件,板件计算出间隙变化(即振动)峰-峰(P-P)值。
2.4 轴承振动(盖或瓦振)
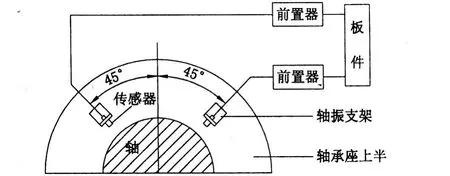
图5 轴振测量示意图
在轴振动的测量中已说明了大轴的振动可以传递到轴承壳上,利用速度传感器测量机壳相对于自由空间的运动速度,板件把从传感器来的速度信号进行检波和积分,变成位移值,并计算出相应的峰-峰值位置信号如图6所示。
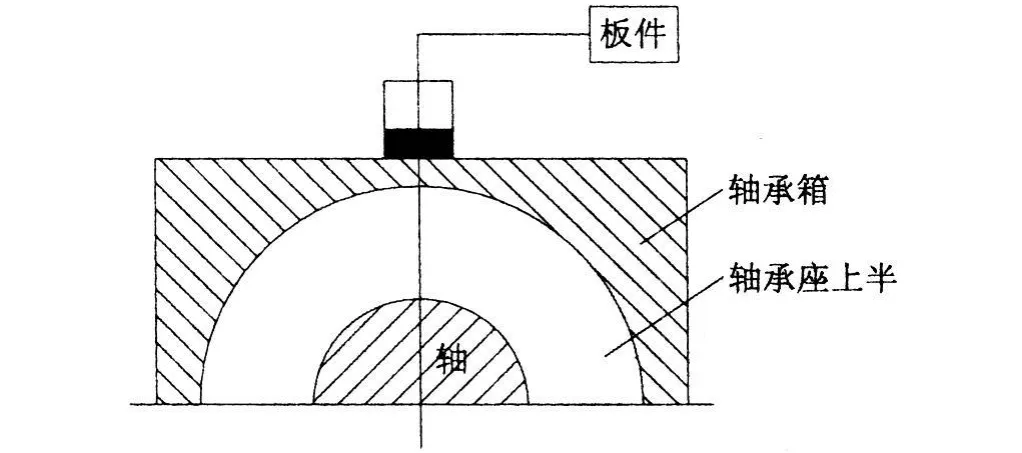
图6 盖振的测量示意图
2.5 偏心
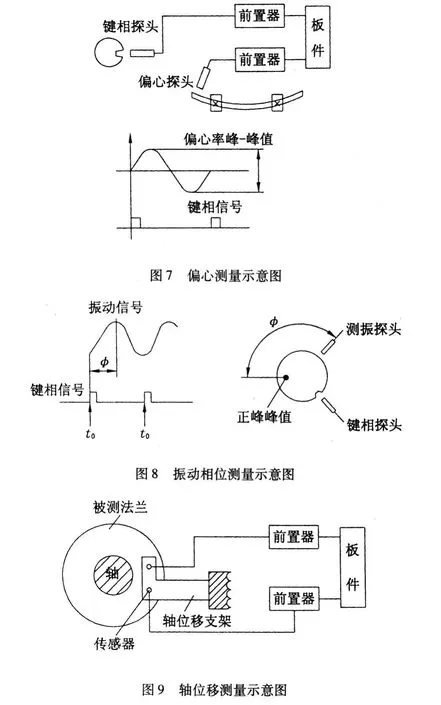
转子的偏心位置,也称为轴的径向位置,是指转子在轴承中的径向平均位置,在转轴没有内部和外部负荷的正常运转情况下,转轴会在油压阻尼作用下,在设计确定的位置浮动,然而一旦机器承受一定的外部或内部的预加负荷,轴承内的轴颈就会出现偏心,其大小是由偏心度峰-峰值来表示,即轴弯曲正方向与负方向的极差之差。偏心的测量可用来作为轴承磨损,以及预加负荷状态(如不对中)的一种指示;转子偏心(在低转速时的弯曲)测量是在启动或停机过程中,必不可少的测量项目,能够看到由于受热或重力所引起的轴弯曲的幅度。偏心监测板接受2个涡流传感器信号输入,如图7所示。一个用于偏心的测量,另一个是键相器的测量,它用在峰-峰信号调节电路上。键相探头观察轴上的一个键槽,当轴每转一转时,就产生一个脉冲电压,这个脉冲可用来控制计算峰-峰值。当然,键相信号也可用来指示振动的相位,如图8所示。当得知测振探头与键相探头的夹角时,就可找出不平衡质量的位置,即转子高点的位置。这对轴的平衡是很重要的。
2.6 轴位移
轴在运行中,由于各种因素,诸如载荷、温度等的变化会使轴在轴向有所移动。这样转子和定子之间有可能发生动静摩擦,所以需用传感器测量转子相对于定子轴向位置的变化。即轴在轴向相对于止推轴承的间隙。由于所采用的监测器可能把传感器的失效作为轴向位移故障而发出报警信号,由此可能引起机组误停机。而根据API670标准要求,用两个探头同时探测一个对象,可以避免发生误报警。但要求两个探头的安装位置离轴上止推法兰的距离应小于305 mm,如果过大,由于热膨胀的影响,所测到的间隙,不能反映轴上法兰与止推轴承之间的间隙。如图9所示,两个涡流探头测量转子的轴向变化,输出探头与被测法兰的间隙成正比的直流电压值,板件接受此电压值后,经过计算处理,显示出位移值。为避免误报警,停机逻辑输出为“与”逻辑。
2.7 胀差
胀差是转子和汽缸之间的相对热增长,当热增长的差值超过允许间隙时,便可能产生摩擦。在开机和停机过程中,由于转子与汽缸质量、热膨胀系数、热耗散系数的不同,转子的受热膨胀和汽缸的膨胀就不相同,实际上,转子的温度比汽缸温度上升得快,其热增长的差值如果超过允许的动静间隙公差,就会发生摩擦,从而可能造成事故。监视胀差值的目的,就是在产生摩擦之前采取必要的措施来保证机组的安全。由于不可能在汽缸内安装涡流传感器,利用滑销系统,传感器被固定在轴承箱的平台上,测量示意图如图10所示。另外,胀差测量如果范围较大,已超过探头的线性范围时,则可采用斜面式测量和补偿式测量方式。
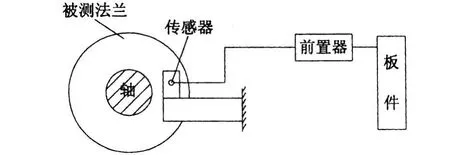
图10 胀差测量示意图
3 TSI监视器在1 000MW机组中的应用
绥中电厂二期扩建2×1 000 MW机组的汽轮机为东方汽轮机有限公司引进日本日立公司技术生产的超超临界压力汽轮机,型号为N1000-25/ 600/600,为超超临界、一次中间再热、单轴、四缸四排汽、双背压式、凝汽式、八级回热抽汽汽轮机,具有较高的效率和安全可靠性。
机组选用美国本特利(Bently)公司生产的3500系统为汽轮机的监视保护系统。本特利3500系统是目前我国大型机组上应用较为广泛,也是本特利公司最先进的TSI系统。本特利3500系列仪表在使用过程中以其实验室级别的精度,组态调整的灵活性,模件、前置放大器、探头的可替换性,安装后为细微偏差的可调整功能给调试、使用提供了很多方便。
系统具有以下主要技术特点。
a.单元模块化结构,安装于标准框架中,主要包括电源模块、接口模块、键相模块、监测模块、通信模块等。
b.各功能模块都有一单片微控制器(MCU),用于实现各模块的智能化功能,如组态设置、自诊断、信号测试、报警保护输出、数据通信等。
c.各模块间通过RS232/RS422/RS485总线和MODBUS协议进行数据通信,最高通信速率为115.2 kbit/s。
d.可通过上位机的组态软件对各个模块进行组态设置,并下载到各个模块的非易失性存储器中。
e.双重冗余供电电源模块。
f.支持带电拔插功能。
本特利3500系统,测量显示通过上位机显示或直接触发继电器模块输出,大部分内部设置都在软件中完成,而且具有多种通信方式。调试过程中,可以用本特利公司提供的RS232通信接口与DCS系统连接,在DCS操作员站进行组态配置和参数显示。另外,还有相对振动、轴位移、胀差等参数通过4~20mA信号送到DEH系统进行显示。
3500 监视系统软件主要有3个软件包。
a.框架配置软件。主要包括框架配置、机架接口模块与主机端口测试使用程序及通信网关测试使用程序、框架配置教程、框架配置帮助等。
b.数据采集DDE(动态数据交换)服务器软件。主要包括数据采集DDE服务器、软件配置使用程序及编辑软件实用程序、RIM(框架接口模块)主机接口测试实用程序、数据采集显示教程。
c.操作员显示软件。主要包括监视器通道值的条形显示、机器链图和对应的数据值、趋势图、系统事件列表、现用的报警信号列表、报警信号列表。
4 结束语
涡流传感器具有线性范围大、精度和灵敏度高、频响宽、抗干扰能力强和温度特性好、安装和调试方便、检测值不受油污和蒸汽等非金属介质影响等优点,所以,以涡流传感器为主要传感器所组成的TSI产品受到了火电厂的普遍欢迎。
[1] 肖大雏.超超临界机组控制设备及系统[M].北京:化学工业出版社,2008.
[2] 肖大雏.国产600MW超临界火力发电机组技术丛书[M].北京:中国电力出版社,2006.
[3] 朱北恒.火电厂热工自动化系统实验[M].北京:中国电力出版社,2005.
猜你喜欢
小资CHIC!ELEGANCE(2022年2期)2022-01-11 12:32:55
装备制造技术(2020年11期)2021-01-26 00:39:12
能源工程(2020年5期)2021-01-04 01:29:00
航空发动机(2020年3期)2020-07-24 09:03:18
数学物理学报(2020年2期)2020-06-02 11:28:48
通信电源技术(2018年5期)2018-08-23 01:16:00
广西电力(2016年4期)2016-07-10 10:23:38
广西电力(2016年4期)2016-07-10 10:23:38
工业设计(2016年4期)2016-05-04 04:00:23
汽车科技(2014年6期)2014-03-11 17:46:08