长沙市城市快速轨道交通控制网的建立
2011-04-19 01:32刘鹏程戴建清匡志威
城市勘测 2011年3期
刘鹏程,戴建清,匡志威
(长沙市勘测设计研究院,湖南长沙 410007)
长沙市城市快速轨道交通控制网的建立
刘鹏程∗,戴建清,匡志威
(长沙市勘测设计研究院,湖南长沙 410007)
介绍了长沙市城市快速轨道交通线网(2050)框架网及2号线一期控制网的建立,通过对控制网的精度分析,表明该控制网完全满足规范要求,同时针对城市复杂环境下控制网的建立进行了经验总结。
城市快速轨道交通;地铁;框架网;GPS;精密导线;精密水准
1 前 言
根据长沙城市轨道交通2050远景规划,长沙地铁由1号线及其支线1A线,2号线及其2A、2B,3号线和4号线共6条线组成,总约180 km,设站82座,其中换乘站14座;设车辆综合基地2处,车辆段2处,停车场6处。2009年首期开工建设的2号线一期工程为地下线,线路全长22.262 km,设站19座。为了满足长沙地铁建设的需要,根据《城市轨道交通工程测量规范》等相关技术要求,结合长沙市的实情,长沙市城市快速轨道交通控制网平面分三级布设为:2050框架网、C级GPS控制网、精密导线控制网;高程布设二等水准网。
2 2050框架网测量
2.1 网形设计

图1 2050框架网布设图(红色点为CZTCORS参考站)
为了保证长沙城市轨道交通2050远景规划各条线路、同一线路不同时期的衔接,不同线路C级GPS控制点起算点的一致性,以6个CZTCORS参考站为起算数据,在其覆盖的区域内新布设16个B级GPS点,构成2050框架网,同时为了保证2050框架网成果的可靠性与准确性,每五年利用CZTCORS系统对其进行联测,确保线路起算成果一致。图1为2050框架网布设图。
2.2 外业观测
观测仪器采用4台套美国产阿司泰克公司Z-X双频机、10台套法国产泰雷兹公司Z-MAX双频机、2台Trimble 5700 GPS双频机、2台Trimble R8,按GPS B级网的精度要求进行静态同步联合观测,共观测84条独立基线,GPS基线向量总数为882。
2.3 数据处理
基线向量采用精密星历,使用美国麻省理工学院的GAMIT/GLOBK软件进行解算,基线解算精度如表1所示。
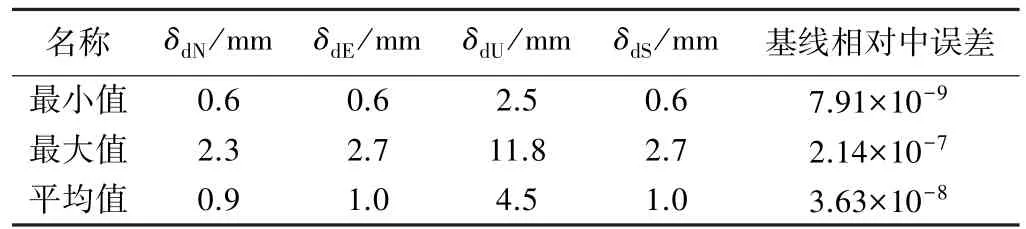
基线精度统计表 表1
平差计算采用武汉大学测绘学院的CosaGPS V5.1软件进行处理,分两步进行,先进行三维无约束平差,然后在长沙独立坐标系下进行二维约束平差;其重复基线、坐标差分量、环闭合差均满足要求,最大环闭合差为0.17 mm,最弱点为PJC1,点位误差为0.12 cm,平均点位中误差为:0.06 cm,最弱边为HLX1—PJC1,边长精度为1/12083000,平均边长精度为:1/76301043均符合设计要求。
3 2号线一期C级GPS控制网测量
3.1 网形设计
2号线一期工程C级GPS控制网沿地铁走向布设,每隔1 km~2 km左右布设一组点位,共布设C级GPS点28点,其中基岩点7个(与水准点共点位),普通地面点3个,楼顶点18个,基岩点采用钻探方式埋设,楼顶点埋设强制对中钢标(三角钢架、圆形钢柱);同时与3个2050框架网点和1个参考站为已知点构成C级GPS控制网,如图2所示,图中黑色点号点为已知点,灰色点号为C级GPS点。
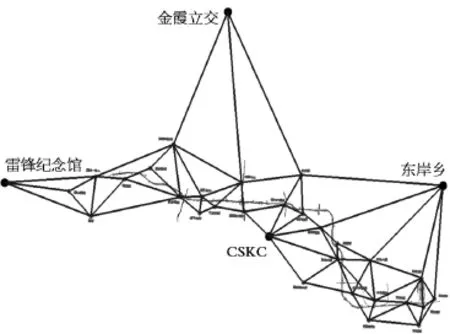
图2 2号线一期工程C级GPS控制网布设图
3.2 外业测量
外业观测采用了4台美国产阿司泰克公司Z-X双频机、2台法国产泰雷兹公司Z-MAX双频机,按GPS C级网精度进行静态同步观测,同一天各个测站位置不动,分上、下午连续测量两个时段,以连续网的方式联接成网,共观测102条独立基线,GPS基线向量总数为340。
3.3 数据处理
基线向量采用Ashtech Solutions 2.6软件进行解算,采用广播星历和双差固定解,平差计算采用武汉大学测绘学院CosaGPS V5.1软件进行处理,分两步进行,先进行三维无约束平差,然后在长沙独立坐标系下进行二维约束平差,其重复基线、坐标差分量、环闭合差均满足要求,最大环闭合差为3.41 ppm,最弱点为光达站-1,点位误差为0.18 cm,平均点位中误差为:0.13 cm,最弱边为XXJD-HHZY,边长精度为1/1 346 000,平均边长精度为:1/4 097 326,均符合设计要求。
4 2号线一期精密导线控制网测量
4.1 网形设计
为了满足地铁施工测量的需要,减少贯通误差,在C级GPS控制网上加密四等精密导线,精密导线网基本上沿地铁线路走向布设,局部地方采取主、副导线埋设,共埋设精密导线点106点,图3为精密导线网图。
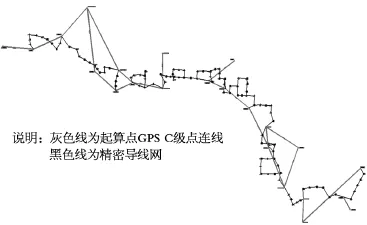
图3 精密导线网图
4.2 外业测量
2号线一期工程精密导线网外业观测采用索佳自动化3D精密全站仪NET05(0.5 s)及配套的气温表和气压表,仪器自动观测记录,可减少人为误差和劳动强度,提高观测精度,设站采用三联脚架法,水平角采用方向观测法观测4测回,精密导线网共有闭合环8个,最大角度闭合差为-6.00″,附合导线14条,最大角度闭合差为6.74″。
4.3 数据处理
原始数据经方向观测值改正、高程归化、投影改化等多项改正后,再进行平差计算,平差软件采用南方平差易,进行严密平差,精度统计情况如表2所示,均优于设计要求。

精度统计表 表2
5 高程控制网测量
5.1 网形设计
2号线一期工程水准点布设采取每一个车站埋设一个基岩点、二个墙水准点为原则,共埋设60个水准点,其中25个基岩点、35个墙水准点,基岩点为钢管式基岩标,采用钻探方式,墙水准点采用不锈钢螺杆,采用植筋胶将其固定,以国家一等水准点为已知点,并与沿线的精密导线网点串联,构成水准网。
5.2 外业观测
水准线路观测采用SOKKIΛS 0.5自动安平数字水准仪及与之配套的因瓦条码水准尺,按国家二等水准测量精度要求进行作业,采用单线路,分上、下午往返观测,电子记簿,自动检核,共组成闭合水准9个,附合水准6条,观测测段155个,水准线路长185.4 km,跨河水准一处。
湘江跨河水准采取GPS测量方法进行测绘,分别在湘江两岸、橘子洲布设GPS普通地面点,如图4所示,外业观测按C级GPS精度要求进行测量,GPS天线高采用二等水准联测法,精确求取,基线向量采用GAMIT软件进行解算,平差计算采用武汉大学测绘学院的CosaGPS V5.1软件进行处理,在WGS-84坐标系中固定一点进行三维无约束平差,求得各点的大地高程及各跨河段的高差。
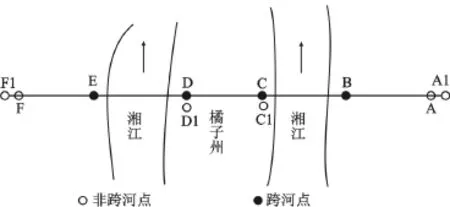
图4 湘江跨河水准布设图
5.3 平差计算
外业所测高差经正常水准面不平行改正后,再进行平差计算,平差计算采用南方平差易,平差后得出每个待定点的高程及每千米全中误差,每千米全中误差为0.98,最弱点高程中误差为±2.61 mm,均符合设计要求。
6 结论与分析
从上文可知,该控制网的精度符合规范要求,可以满足轨道交通建设的需要,同时通过项目的实施和实际操作,发现在城市复杂的环境中进行高精度轨道交通控制网的测绘,要满足其测量精度,应在施测方案、点位的埋设、观测方法以及仪器设备的选型上进行周密的策划、论证,现总结分析如下:
(1)起算数据应采用统一的、高精度的控制点。城市轨道交通线网一般由几条或十几条线路组成,线路施工周期较长,施工精度要求高,为了保证各条线路、同一线路不同时期的衔接,如果城市没有统一的、高精度的、满足轨道交通建设的二等平面控制网,应优先考虑建立覆盖线网范围、统一的二等框架基准平面控制网,这也是能有效提高项目控制网精度最为有力的措施和方法。
(2)C级GPS点点位间距应合理,通视点距离以1 500 m为宜,若小于1 000 m,点位的相对精度很难满足,且用于精密导线网测量时,方向误差很容易超出规范要求,若大于2 000 m,则对通视条件要求高;点组之间的距离以2 000 m为宜,距离大于2 500 m,在布设精密导线网时,点数和导线长度很容易超出规范要求;精密导线网点点位间距一般以350 m为宜,特殊地段不应短于175 m。
(3)C级GPS点点位尽量埋设在楼顶上,且采用强制对中标志,减少仪器对中误差和重复摆站的较差,提高测量精度,同时对点位的保护较好,但要与业主进行良好的沟通;精密导线网点一般沿线路埋设在线路两侧的地面上,车站附近的精密导线网点尽量垂直于线路埋设;由于轨道交通建设的周期较长,精度要求高,为防止在地质条件较差的地段,水准点点位发生沉降,每一个车站应布设一个基岩水准点和1个~2个墙水准点。
(4)在城市复杂的环境中,若采用常规全站仪进行四等精密导线网测量,对点位的通视条件要求很高,且观测人员的注意力应保持高度集中,施测难度较大;若采用全自动测量仪器,自动照准、自动观测、自动记录、自动计算限差,则可大大降低劳动强度,提高劳动效率,缩短工期,提高测量精度。因此在设备的选型上应优选考虑采用全自动测量仪器,但也要考虑仪器的成本和今后的可利用率。
(5)C级GPS外业测量采用重复观测法,由于C级GPS测量的观测时段数大于2,即要求在每一个点位上,进行两次GPS测量,在交通拥堵的城市中进行移站测量,可能需花费大量的工作时间,不利于工作的开展,因此应考虑同一天对同一点进行两次观测,即重复观测法。采用全自动测量仪器进行水平角度与距离观测时,一般应在满足规范的前提下,设置仪器自动多测1个~2个测回,可避免因某一测回超限而需重新设站观测的麻烦,这样既提高了测量精度,又提高了劳动效率。
[1] 孔祥元,郭际明,刘宗泉.大地测量学基础[M].武汉:武汉大学出版社,2005
[2] 孔祥元,梅是义.控制测量学[M].武汉:武汉大学出版社,2005
[3] 黄劲松,李征航.GPS测量与数据处理[M].武汉:武汉大学出版社,2005.3
[4] 余方达,郝国芳.ITRF框架基准在高精度GPS测量中的统一[J].孝感学院学报,2002,22(6),83~85
[5] 陈俊勇.中国国家高精度GPS大地控制网的建成[J].测绘通报,1998(8)
[6] 周忠漠,易杰军.GPS卫星测量原理与应用[M].北京:测绘出版社,1992
[7] 刘基余,李征航.全球定位系统原理及其应用[M].北京:测绘出版社,1993
[8] Documentation for the GAMIT GPS Analysis Software,Release10.31 2006
[9] http://sopac.ucsd.edu/processing/gamit/
Construction of Rapid Rail Transit Control Network of ChangSha Urban
Liu PengCheng,Dai JianQing,Kuang ZhiWei
(Changsha Geotechnical Engineering and Surveying Institute,Changsha 410007,China)
The paper introduces that the ChangSha urban rapid rail transit net framework and control network of two Line one issue of project are constructed.Through the analysis of Control Network’s accuracy,it shows that the control network meets the requirements of Specifications completely.The lesson is summarized from the established of control network of urban complex environment.
urban rapid rail transit;subway;net framework;GPS;Precision wire;precise leveling
1672-8262(2010)03-91-03
P221
A
2010—10—19
刘鹏程(1975—),男,高级工程师,主要从事城市GPS测量、CORS建设与管理等方面的工作与研究。
猜你喜欢
北京测绘(2021年1期)2021-02-05
西部交通科技(2021年9期)2021-01-11
航天制造技术(2020年4期)2020-09-11
家庭影院技术(2018年11期)2019-01-21
制造技术与机床(2018年12期)2018-12-23
智能建筑与智慧城市(2018年11期)2018-11-28
证券市场红周刊(2018年37期)2018-05-14
中国资源综合利用(2017年2期)2018-01-22
测绘科学与工程(2016年4期)2016-04-17
中国房地产业(2016年2期)2016-03-01