
基于DSP2812的电动机测速方法的研究
2011-04-17 03:24李昕奇金勇
电气自动化 2011年4期
李昕奇 金勇
(1.南京理工大学 机械工程学院,江苏 南京 210094;2.总装工程兵驻武汉军事代表室,湖北 武汉 430000)
基于DSP2812的电动机测速方法的研究
李昕奇 金勇
(1.南京理工大学 机械工程学院,江苏 南京 210094;2.总装工程兵驻武汉军事代表室,湖北 武汉 430000)
为了精确的快速检测伺服系统的速度特性,介绍了采用TMS320F2812以及光电编码器作为硬件进行电动机测速,提出了一种基于QEP电路的变M/T测速算法。实验结果表明转速测量精度高,响应速度快,具有一定的实际意义。
TMS320F2812 光电编码器 变M/T法
0 引言
位置伺服系统是电流、速度、位置的三闭环控制系统,需要传感器精确检测被控对象的瞬时信息,进行误差校正。测速装置是伺服系统中的重要装置,其速度分辨能力的高低是实现高精度,大范围速度测量的重要因素。对于不同的伺服系统,所选择的测速装置以及测速方法也会有所不同,所以应根据实际系统的要求,选择不同的测速方法以满足系统要求。
1 基于光电编码器测速方法的分析
常用的基于光电编码器的电动机测速方法有以下几种:M法、T法、M/T法、变M/T法。
M法是在规定的时间间隔T内,测量编码器所产生的脉冲数来获得被测速度值。此方法的检测过程在极端情况下会产生±1个转速脉冲的误差,故只有在电动机转速较高时才会有较高的测量精度。所以M法只适用于高速测量场合。
T法是测量相邻两个脉冲的时间间隔来确定被测速度的方法。此方法在极端情况下会产生±1个高频脉冲周期。因此T法在低速测量(相邻转速脉冲间隔时间较大)时才会有较高的精度。
M/T法是同时测量检测时间和此检测时间内转速脉冲的个数来确定被测转速。M/T具有较高的检测精度,但在低速状态下检测时间过长,无法满足伺服系统的快速响应要求。
变M/T法是指测速过程中,不仅测取的测速脉冲与高频时钟脉冲随电机的转速不同而变化,而且测量时间T也是变化的。所以变M/T法相比较其它三种测速方法在高速、低速时都具有较高的测量精度,而且响应速度快,在闭环控制中具有较高的使用价值。
基于以上分析,本文将采用变M/T法完成电动机的转速测量。
2 测试系统的硬件设计
光电编码器是一种高精度的角位移传感器,常被用于高精度的控制系统(例如数控机床、机器人、伺服系统的速度反馈控制)中,实现角位移的检测。增量式光电编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相,A、B两组脉冲相位差90°,从而可方便地判断旋转方向,而Z相为每转一个脉冲,用于基准点定位。
TMS320F2812的两个事件管理器模块都有一个QEP电路,如果电路被使能,那么可以对从 CAP1/QEP1和 CAP2/QEP2(EVA)或CAP4/QEP3和CAP5/QEP4(EVB)引脚上输入的正交编码脉冲进行解码和计数。QEP电路和光电编码器接口可用来实现从电动机上获得其速度信息。如图1所示光电编码器的正交脉冲从QEP1、QEP2口输入完成解码和计数。
QEP电路对正交编码脉冲的两个沿都进行计数,因此,通用定时器2(或4)产生的时钟频率是光电编码器发出频率的四倍,同时QEP电路通过解码逻辑判断哪个相位超前以确定定时器的计数方向。
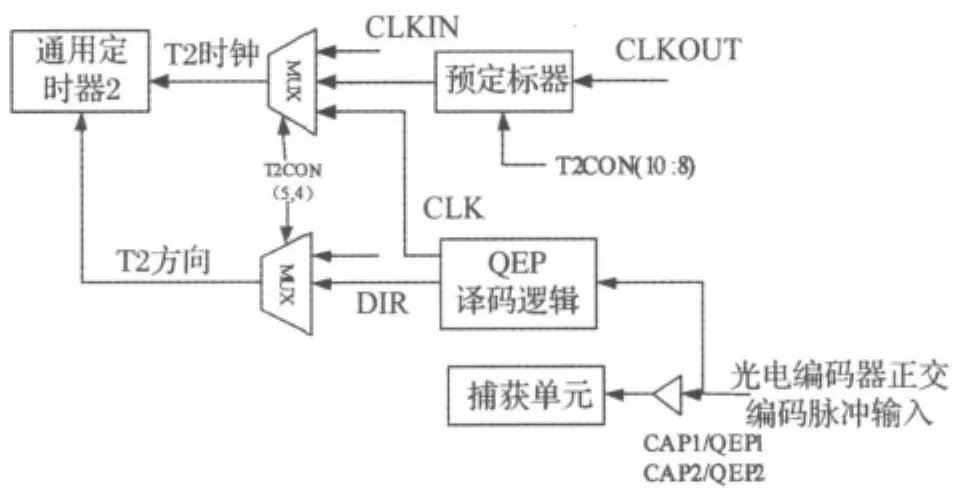
图1 EVA的QEP电路结构框图
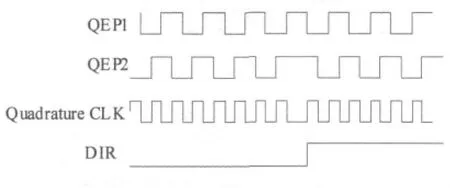
图2 QEP:译码时钟和计数方向时序图
3 电动机的转速测量及软件设计
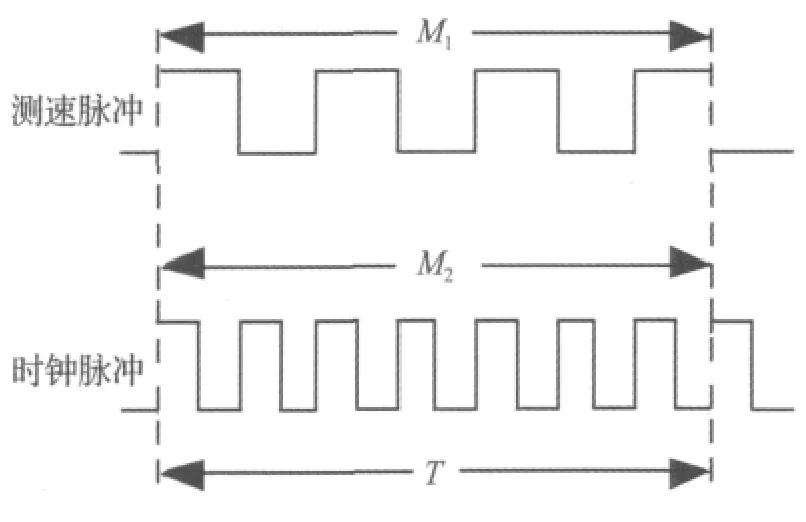
图3 测速原理图

定时器T2、T4的计数寄存器TxCNT初值都赋为0。测速过程中读取GP定时器控制寄存器A的T2STAT位(通用定时器2的状态位)来判断电机正反转。当T2STAT=1时,递增计数,电机正转M1=CM;当T2STAT=0时,递减计数,电机反转M1=0xFFFF-CM。
4 实验研究
由于实际系统中电机的转速不稳定,所以首先采用信号发生器输出方波代替光电编码器的输出波形,对测速系统进行静态标定。测速范围100Hz-500KHz。测频数据如表1。
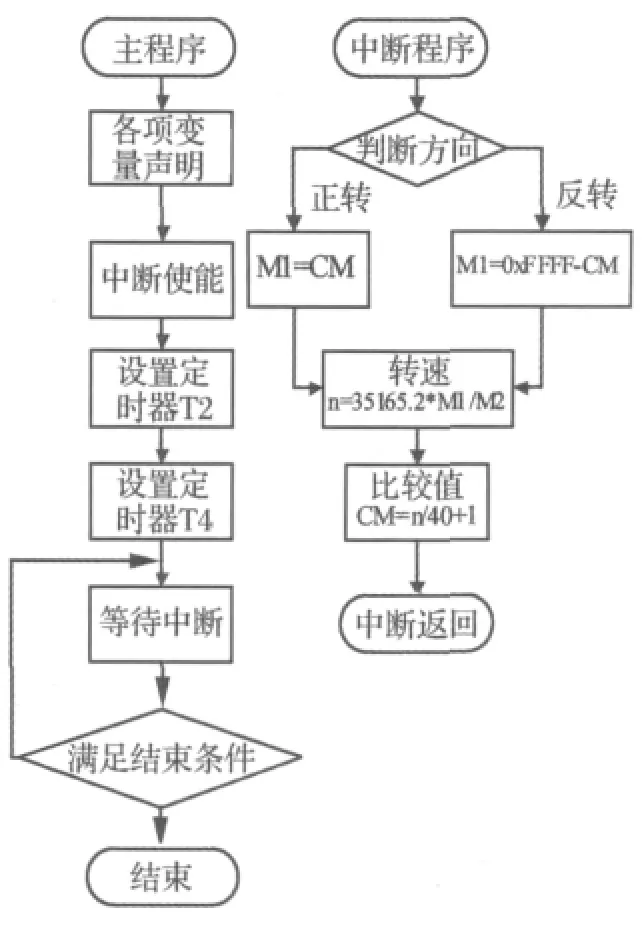
图4 程序流程图
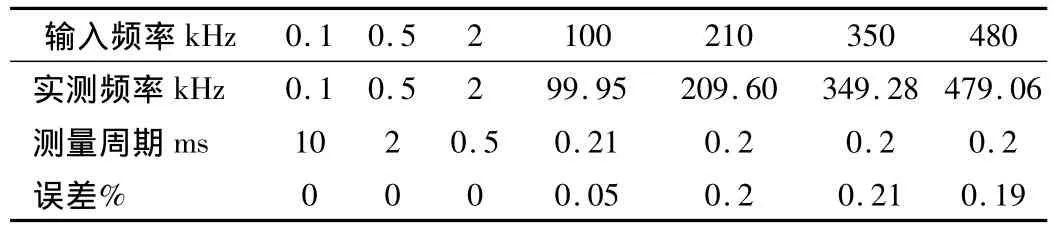
表1 静态标定数据
实验结果表明,此测速方法无论在低速还是高速状态,都有较高的测试精度,且响应速度很快,完全能够满足实际伺服系统的要求。
实际系统测试时采用北京斯达特公司的SH系列步进电机驱动器SH-3F075、常柴集团微特电机厂生产的步进电机70BF003和长春禹衡光学有限公司的A-ZKD-13-200BM-G05LH混合式光电编码器构成测试对象,并由波形发生器提供驱动脉冲控制电机转速。
数据采集时分别给驱动器加 2.0kHz、2.2kHz、2.5kHz的频率,则电机的理论转速分别为498.5r/min、548.4r/min、623.2r/min。每个频率分别采样100个数据。测量结果如图5。由于电机实际转速波动较大,测得结果在理论计算值上下波动,并且随着驱动频率的增大转速也随之平稳,与实际情况相符。
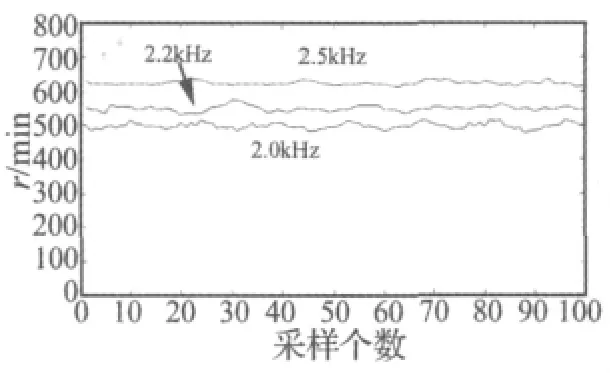
图5 实际转速测量采样图
[1]汪涛.一种基于DSP的伺服电动机转速检测方法[J].微机电,2006.
[2]赵岩.编码器测速方法的研究[D].长春:中国科学院长春光学精密机械与物理研究所,2002.
[3]万山明.TMS320F281xDSP原理及应用实例[M].北京:北京航空航天大学出版社,2007.
The Research of Speed Measuring of Motor Based on DSP2812
Li Xinqi1Jin Yong2
(1.NanjingUniversityofScienceandTechnology,NanjingJiangsu210094,China;2.MilitaryRepresantativeOfficeofChiefEquipmentDepartmentEngineeringCorpinWuhan,WuhanHubei430000,China)
For improving the accuracy and speed of velocity detection of servo system,this paper introduced the principle of using TMS320F2812 and incremental encoder for velocity detection,and introduced amethod of Alterable M/T based on QEP circuit.The experiment result shows that thismethod has a higher precision and fast response in velocitymeasuring.It’s very significant for improving the capacity of servo system.
TMS320F2812 Encoder the Method of Alterable M/T
TM921.54+1
A
1000-3886(2011)04-0081-02
2010-11-04
李昕奇(1987-),男,汉族,研究方向:DSP嵌入式系统开发,伺服电机控制。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
测控技术(2018年12期)2018-11-25
成都信息工程大学学报(2018年3期)2018-08-29
制造技术与机床(2017年7期)2018-01-19
北京航空航天大学学报(2016年4期)2016-02-27
电子器件(2015年5期)2015-12-29
智能建筑电气技术(2015年5期)2015-12-10
智能建筑电气技术(2015年5期)2015-12-10
