尾翼对超空泡航行器形态及力学特性影响实验研究
2011-04-15 10:53:52张宇文袁绪龙张纪华
实验流体力学 2011年1期
裴 譞,张宇文,袁绪龙,张纪华
(西北工业大学航海学院,西安 710072)
0 引 言
超空泡是水流空化得以充分发展而形成的,当水下运动体被一个稳定的超空泡所包围时,其运动的摩擦阻力可减少90%以上,可显著提高水下武器的航行速度[1]。二次世界大战以后,美国、前苏联、德国等国家开始尝试利用这一原理研制高速水下航行体。其中俄罗斯取得成绩最为引人注目,速度可达90~100m/s的“暴风雪”水下超空新型泡航行器,已经装备部队,并投放国际武器市场[2]。这也导致了美、德、英和法国等西方国家从20世纪90年代初至今的第二次研究热潮[3]。
由于技术等因素的限制,目前以“暴风雪”为代表的超空泡航行器仅仅拥有直航特点,并不具备航行器机动弹道特性,这使得航行器的突防效果和使用范围出现了明显的局限性,且随着当前水面舰艇与水下航行器硬杀伤拦截手段的日益丰富,对超空泡航行器机动弹道的要求日益提高[4]。超空泡航行器的控制原理主要涉及控制力的产生问题。给超空泡航行器提供控制力[5],实现对航行器的运动控制有3种可能的途径:利用矢量推进器改变推力方向;头部空化器同时用作控制面,改变空化器迎角,产生法向力分量用于控制;配置尾部控制面,利用控制面舵角产生控制力[6]。介绍了西北工业大学通气空化水洞中进行的水下航行体的超空化尾翼力学试验。研究了不同尾部尾翼安装位置、安装后掠角对超空泡的形态及其力学特性之间的关系,探讨研究了这些参数的变化对力学特性的影响规律。
1 实验设备
实验模型如图1所示,分为空化器,通气碗,前锥段,圆柱段,尾翼和尾喷管6部分组成[7],其中空化器为0°迎角圆盘空化器,空化器相对直径

式中Dn为空化器直径;D为圆柱段直径。

图1 实验模型Fig.1 Experimental model
实验是在西北工业大学高速水洞中展开的,该水洞洞体为封闭循环式管道,工作段尺寸为0.4m×2m,工作段水速在0~18m/s连续可调,工作段压力20~300kPa连续可调,最低水洞空化数0.15。水洞辅助装置主要包括水质处理系统,水中含气量控制与排除系统,实时数据自动采集、处理和显示系统等。为了便于数据处理,实验中采用高速摄像机进行图像采集[8],用以记录并校核超空泡形态。为本项实验专门研制了通气、压力控制与采集系统,其中通气系统包括最高压力为0.6MPa的大功率空气压缩机及其配套的通气管路系统、通气流量控制器和数据采集与控制板卡等,可同步实现3路通气的无级调节。压力采集系统可进行空泡内多点压力、水洞总压与工作段压力实时数据的采集。实验模型采用模块化构成[9],包括头部空化器、前锥段、圆柱段、尾喷段,可拆卸尾翼以及垂直支杆等。空化器选用可更换的可变迎角圆盘形状系列。为了消除模型尾部垂直支杆对模型尾部流场的影响,设计翼型导流罩,所有信号连线和通气管均通过导流罩引出洞体。模型在水洞中采用水平尾支撑安装方式(参见图2)。
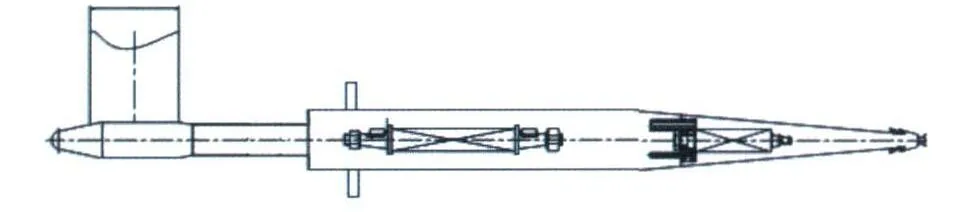
图2 模型安装示意图Fig.2 The installation of model
2 实验结果与分析
试验环境为:工作段背压为0.12MPa,来流速度为12m/s,迎角变化范围为-0.6°~0.6°。
2.1 空泡形态特性
空泡形态的变化特性与来流雷诺数,空化器相对直径与通气流量等因素有较为密切的关系,本节将讨论其对空泡形态的影响特性[10]。
雷诺数对空泡的影响主要反映主体空泡闭合位置[11],雷诺数越大,即来流速度越快,主体空泡闭合点越靠后,空泡的附体效果越好[12]。试验中为了实现通气空泡的最快生成,并考虑水洞的实际水速,试验雷诺数Re=8.0×106。
空化器对空泡的影响特性表现为空泡最大直径改变[13],试验中由于背压较高,因此为了获得较为理想的附体空泡,采用¯D=0.33作为空化器直径。
试验通气流量分为3种工况:(1)40L/min;(2)60L/min;(3)100L/min。尾翼后掠角为0°,模型迎角为0°。
图3给出了不同工况下空泡形态对比。可见随着通气量增大,空泡尺度增大[14]。由于重力效应[15]较小,故空泡上下闭合点位置较为接近,与此同时尾翼开始空化[16],但是由于空泡尾部上漂,尾翼上下空化不对称。
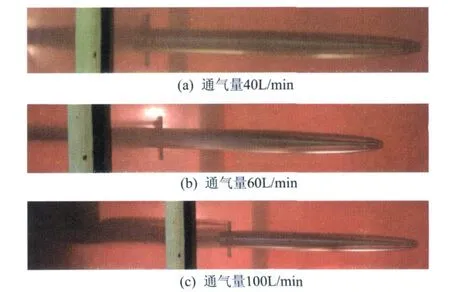
图3 不同通气量下空泡形态Fig.3 The shape of cavity on the different gas ventilated rate
为了保证航行器尾部尾翼具有足够的控制力,必须保证控制面具有相当的确定沾湿区域,以保证控制力是可预知的,同时确保控制力的变化是渐进的[17]。从实验中注意到,对于通气超空泡航行器,由于空泡泄气过程对模型尾部与底部的作用,尾部尾翼上下出现了不同程度的沾湿面积上的差异,因此不可避免出现在有迎角状态下的横滚力矩,需要通过相应手段加以克服。
图4给出了0°后掠角尾翼变迎角试验的空泡形态照片。可见随着模型迎角增大,空泡偏向一侧,由于气流减少尾翼空泡逐渐减小并消失。

图4 不同迎角下空泡形态Fig.4 The shape of cavity on the different attack angle
2.2 尾翼对航行器力学特性的影响
试验采用两种试验模型:(1)光体模型;(2)安装尾翼的全状态模型。模型的迎角为0°。
图5给出了模型有无尾翼下空泡形态的对比照片,主体空泡尾部闭合状态出现明显的差别,模型光体状态下,空泡基本呈椭圆体结构,且尾部涡管区较为平稳,无明显脉动泄气现象;当尾翼空泡产生的状态下,尾翼在穿刺空泡壁面过程中对空泡尾部闭合起到了明显的延伸作用,空泡呈明显拉长椭球体,且涡管出现有较为强烈的脉动泄气,尾流区空泡壁面振动也较为明显。

图5 模型有无尾翼空泡形态Fig.5 The shape of cavity with or without wing
如图6所示,光体状态下模型的空化阻力系数较全状态模型的空化阻力系数有明显下降,这是由于尾翼的部分穿刺空泡实现局部沾湿所造成的,且由局部沾湿所带来的阻力对整个模型的阻力贡献非常明显。
图7和8给出了不同工况下模型的侧向力和力矩特性曲线。可以明显观察到,光体状态下模型的侧向力系数和侧向力线斜率较全状态下模型明显减小,但与弹体侧向力对整个模型的贡献而言算小量。法向力矩变化规律与侧向力变化规律相类似,但光体在临界迎角区域的静稳定特性表现不明显。
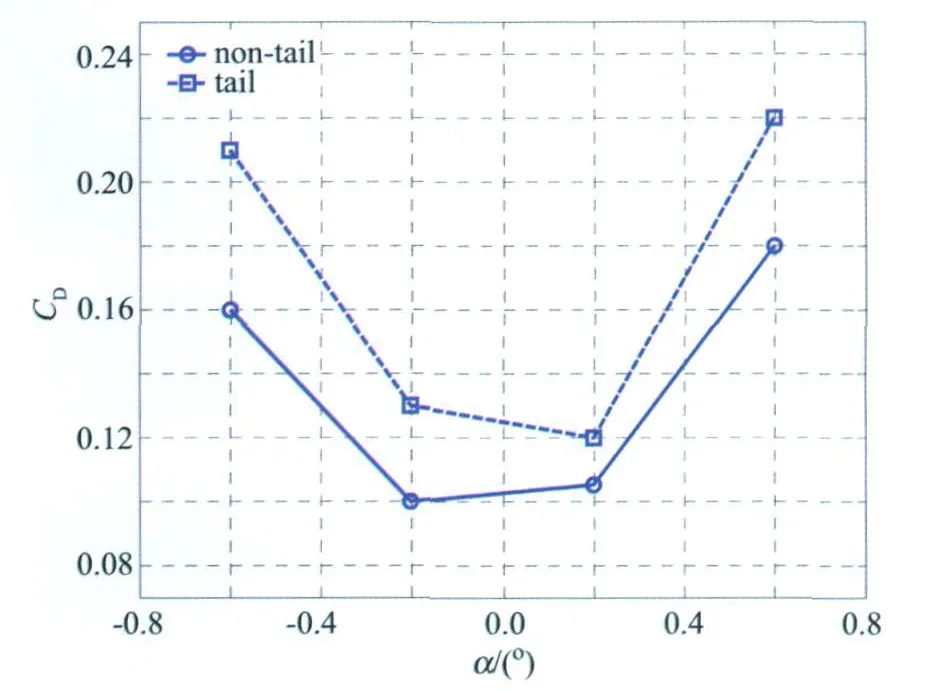
图6 模型阻力特性曲线Fig.6 The drag characteristic of model
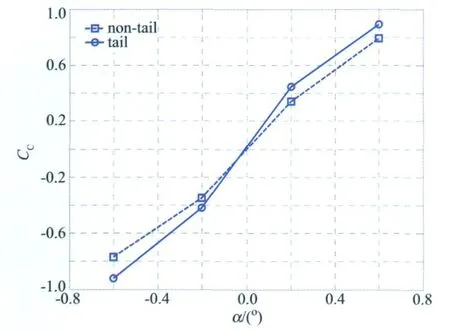
图7 模型侧向力特性曲线Fig.7 The yawning force characteristic of model

图8 模型力矩特性曲线Fig.8 The moment characteristic of model
2.3 不同后掠角对航行器力学特性的影响
试验共设计 3 种尾翼后掠角:0°,30°和60°。在每一种后掠角模型状态下,以12m/s水速记录空泡形态,测量整个模型的流体动力。
如图9所示,在不同后掠角状态下,空泡闭合出现明显的差异。尾翼对流动的阻滞作用对超空泡的闭合是有利的,后掠角越大,尾翼高度越低,对空泡闭合的影响越小,尾翼露出空泡的穿刺长度越小,作为舵使用时舵效越低。

图9 不同尾翼后掠角空泡形态Fig.9 The shape of cavity on the different sweepback angle
图10给出了不同尾翼后掠角条件下的模型在空化前后的阻力特性曲线。由对比30°和60°尾翼后掠角模型阻力系数可以发现,尾翼后掠角越大,模型的沾湿阻力和空化阻力越小,尤其是空化阻力系数变化很大,从降低模型总体阻力系数的角度看,应采用大后掠角尾翼,但是由于大后掠角状态下,尾翼穿刺空泡壁面较为困难,且容易产生较为明显的翼面空泡,无法保证尾翼的有效沾湿面积,故作用在尾翼上的作用力亦较小,为了实施机动航行控制,所需舵角较大的情况下,还需考虑舵效问题。
图11给出了不同尾翼后掠角条件下的模型空化前后的侧向力特性曲线。可见,尾翼后掠角越大,模型的空化侧向力线斜率越小,即舵效越小,但是舵效变化引起的侧向力相对迎角引起的侧向力变化为小量。
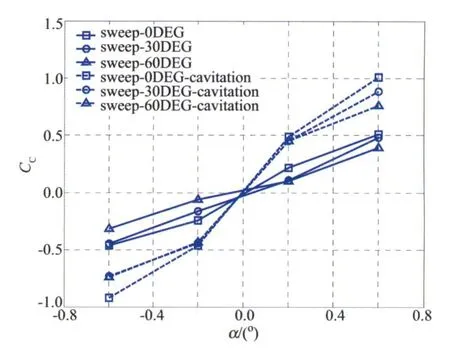
图11 模型侧向力特性曲线Fig.11 The yawning force characteristic of model
综上所述,尾翼后掠角对模型阻力与侧向力特性的影响为:后掠角越大,模型阻力系数越小,侧向力线斜率越低。
为了减小模型总体空化阻力系数,可以考虑使用小后掠角尾翼,但是为了获得足够的舵效进行机动航行控制,需要较大的舵效。因此应当根据特定阶段的需要综合考虑,选用适当的尾翼后掠角。
2.4 不同尾翼安装位置对航行器力学特性的影响
试验共设计3种尾翼安装位置,分别以尾翼前缘根部距离头部位置相对比例作为设计工况,即¯L1=L1/L,式中L1为尾翼前缘根部距离头部长度,L为模型全长,则实验工况为:¯L1=0.854,¯L1=0.864和¯L1=0.874。在每一种安装位置工况下,以12m/s水速做变迎角测力试验,记录空泡形态,测量整个模型的流体动力。
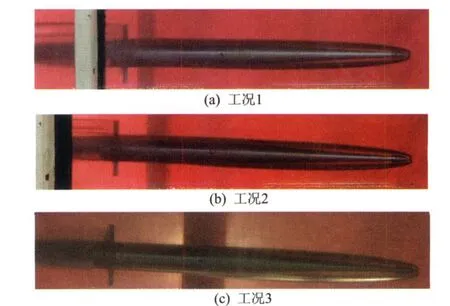
图12 不同尾翼安装位置时空泡形态对比Fig.12 The shape of cavity on different tail wing installation positon
从图12中可以观察到,尾翼安装位置对超空泡形态的影响主要表现为:尾翼安装位置越靠前,尾翼从主体空泡获得的气量越多,尾翼空泡尺度越大。且由于尾翼空泡的影响,导致空泡尾部闭合位置的不同从而造成整体超空泡流型的不同,即当尾部空泡实现完全生成状态下,空泡半径

式中:L为尾翼展向长度;r为模型半径。
尾端空泡椭球体闭合外形出现阶跃变化,等效于主体空泡闭合被强制性阻滞拉升,改变空泡流型,有效延伸了空泡闭合点。
图13给出了不同尾翼安装位置的模型空化前后阻力特性曲线。可见安装位置对沾湿状态的模型阻力几乎没有影响,空化后,安装位置靠后的阻力系数相对较大。
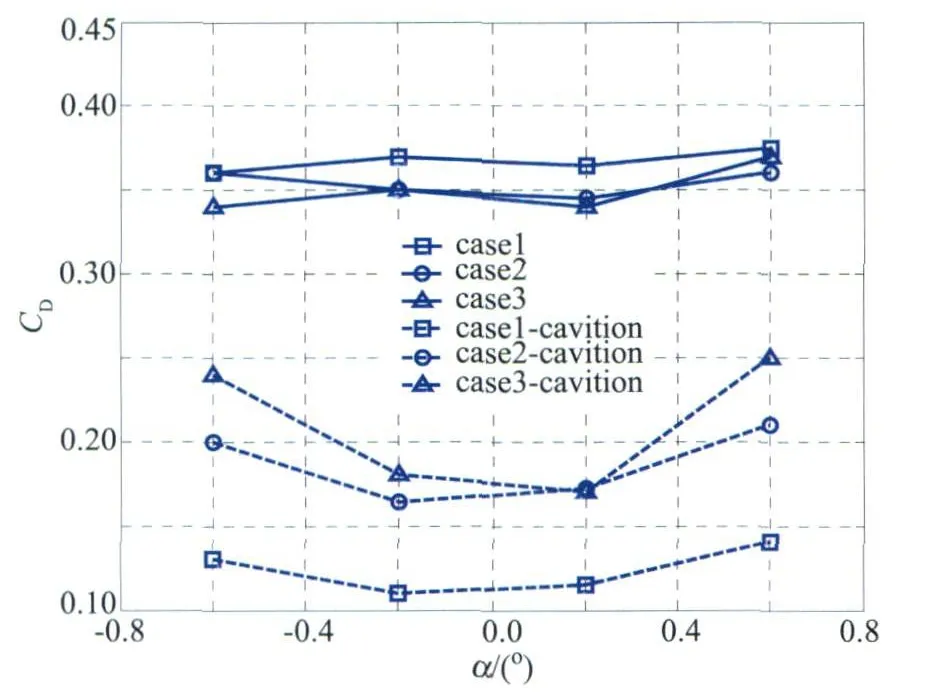
图13 模型阻力特性曲线Fig.13 The drag characteristic of model
图14给出了不同尾翼安装位置的模型空化前后侧向力特性曲线。可见尾翼安装在工况1变化较小,工况2和3时,模型侧向力特性变化较大,说明尾翼安装偏前,对体空泡形态及其闭合的影响较大,由于尾翼空泡的作用,等同于增大尾部空泡直径,滞迟空泡尾端面的生成,等效于整体拉长超空泡,因而导致模型主体侧向力特性变化较大。
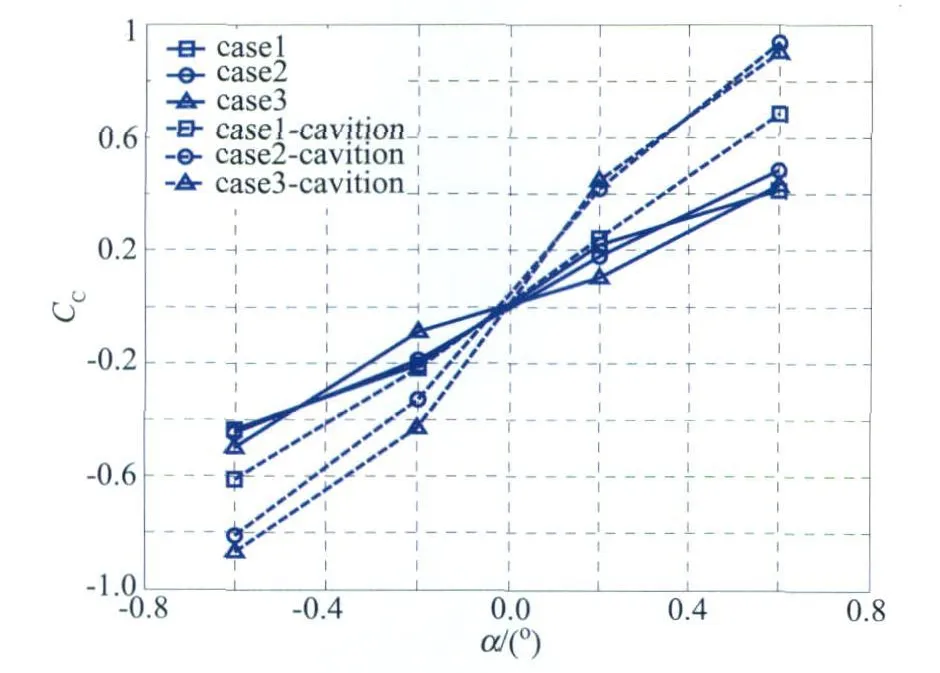
图14 模型侧向力特性曲线Fig.14 The yawning force characteristic of model
图15给出了不同尾翼安装位置的模型空化前后俯仰力矩特性曲线。可见尾翼安装在工况1变化较小,工况2和3时,模型俯仰力矩特性变化较大,说明和侧向力变化特征相类似,尾翼安装偏前,对体空泡形态及其闭合的影响较大,导致模型俯仰力矩特性变化较大。
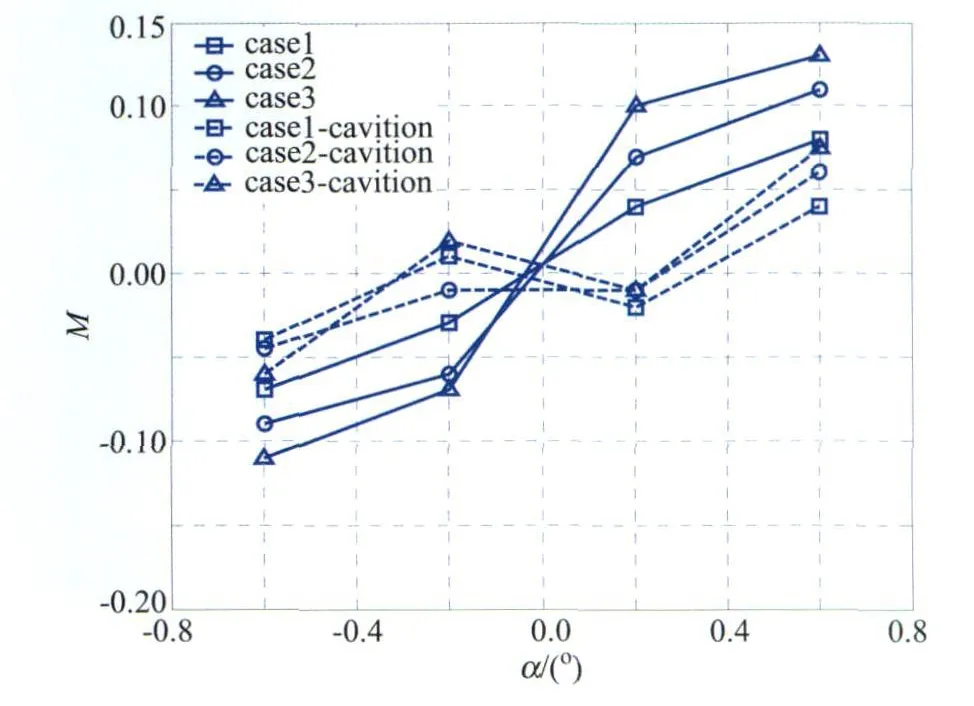
图15 模型俯仰力矩特性曲线Fig.15 The moment characteristic of model
综上所述,尾翼安装位置对模型阻力和侧向力的影响为:尾翼安装位置越靠后,沾湿阻力变化较小,但空化阻力明显增大;空化侧向力与力矩特性相类似,由于空泡的增升效果的减弱,尾翼安装位置越靠后,空化侧向力和空化力矩越小。
故从减阻效果及其侧向力特性上分析,尾翼靠前布置,能够有效减小阻力,增大航行器侧向力与力矩,对整个航行器机动航行是有利的。但尾翼位置过于靠前,将造成航行器空化状态下侧向力焦点靠前,使得航行器的静稳定度下降,不利于其自身的姿态保持与恢复。
3 结束语
通过对航行器尾翼通气超空泡实验研究,可以得到以下结论:
(1)在进行超空化的实验研究中,采用人工通气超空化用以提高泡内压力从而减小空化数的方法切实可行;
(2)尾翼对空泡形态的闭合具有较为明显的影响,特别是当尾翼形成翼面空泡后,对整个航行器主体空泡的闭合具有一定的迟滞作用;
(3)当尾翼拉长主体空泡后,尾部涡管区域出现明显的脉动泄气现象;
(4)尾翼的后掠角减小将减小尾翼的空泡壁面穿刺量,因此有利于降低航行器的空化阻力,但可能造成尾翼舵效的下降;
(5)尾翼安装位置对主体空泡的影响主要体现在与空泡壁面的交点,尾翼越靠前,空泡对尾翼的包络性越好,阻力越小,侧向力和力矩越大。
通过分析上述影响效果,说明了尾翼的自身结构、后掠角与安装位置对航行器的力学特性具有较大的影响,翼身/弹泡耦合同时影响阻力、侧向力与法向力矩,因此在尾翼的选取上需要综合考虑,从而得到尾翼的最优设计。在未来的研究中,将采用PIV技术研究尾翼与弹体、附体空泡之间的流场耦合关系。
[1] KIRSCHNER I N,GIESEKE T A,STINEBRING D R,et al.Supercavitiation research and development[A].Undersea Defense Techn-ologies Hawaii 2001[C].Waikiki,HI,2001.
[2] 张宇文.空化理论与应用[M].西安:西北工业大学出版社,2007.
[3] SAVCHENKO Y N.Investigation of high-speed supercavitating underwater motion of body,high speed body motion in water[R].NASA no.19980020552,Ukraine:UNAS,1998.
[4] ROBERT C,CASTANO,et al.Experimental study of ventilated cavities on dynamic test model[A].In Proceedings CAV 2001:Fourth International Symposium on Cavitation,California Institute of Technology Pasadena,session B3.004.
[5] 蒋洁明,鲁传敬,胡天群,等.轴对称体通气空泡的水动力实验研究[J].力学季刊,2004(12):450-456.
[6] SHEN Y,DIMOTA KIS P.The influence of surface cavitation on hydrodynamic forces[A].The 22nd ATTC[C].1989:44-53.
[7] 谢正桐,何友声.小迎角轴对称细长体的充气肩空泡试验研究[J].实验力学,1999,14(3):279-287.
[8] 陈伟政,张宇文,邓飞,等.水洞实验图像的一种测量与处理方法[J].流体力学实验与测量,2004,18(1):67-70.
[9] 邓飞,张宇文,杨武刚.超空化航行体原理实验模型结构涉及[J].机械科学与技术,2005(4):434-437.
[10]LOGVINOVICH G V,SEREBRYAKOV V V.On the methods of analysis of thin axisymmetric cavities[J].Hydromechanika.Kiev,Naukova Dumka,1975(32):47-54.
[11]VLASENKO Y D.Control of cavity parameters at supercavitating flow,high speed body motion in water[R].NASA no.19980020564,Ukraine:UNAS,1998.
[12]VLASENKO Y D.Experimental investigation of supercavitation flow regimes at subsonic and transonic speeds[C].Osaka,Japan:Cav03-GS-6-006.
[13]ROUSE H,MCNOWN J S,CAVITATION,et al.Head forms at zero angle of yaw,studies in engineering[R].Bulletin 32,State University of Iowa,1948.
[14]杨武刚,张宇文,邓飞,等.通气流量对超空泡外形特征影响实验研究[J].西北工业大学学报,2007,6:358-362.
[15]袁绪龙,张宇文,王育才,等.水下航行体通气超空泡非对称性研究[J].力学学报,2006,3(36):146-150.
[16]KUK LINSK I R,CASTANO J,HENOCH C.Experimental study of ventilated cavities on dynamic testmodel[C].ProcFourth International Symposium on Cavitation,Pasadena,CA:2001.
[17]NESTERUK I.Influence of the flow unsteadiness,compressibility and capillarity on long axisymmetric cavities[C].Fifth International Symposium on Cavitation,Osaka,Japan,2003.
猜你喜欢
海军航空大学学报(2023年5期)2023-11-14 07:41:40
北京航空航天大学学报(2021年6期)2021-07-20 07:23:52
湖北工业职业技术学院学报(2021年1期)2021-04-01 09:22:28
名车志(2020年10期)2020-10-27 09:51:06
民用飞机设计与研究(2020年1期)2020-05-21 07:24:38
产品可靠性报告(2017年6期)2017-09-05 10:04:18
飞行力学(2016年5期)2016-10-27 02:24:32
北京航空航天大学学报(2016年12期)2016-02-27 06:32:40
空气动力学学报(2015年3期)2015-04-14 08:42:37
科技传播(2014年4期)2014-12-02 01:59:42