船用柴油机组调速系统仿真研究
2011-04-10 08:23:22张安明李玉生
中国舰船研究 2011年4期
张安明 李玉生 王 伟
1海军驻大连船舶重工集团有限公司军事代表室,辽宁 大连116005 2中国舰船研究设计中心,武汉430064
船用柴油机组调速系统仿真研究
张安明1李玉生1王 伟2
1海军驻大连船舶重工集团有限公司军事代表室,辽宁 大连116005 2中国舰船研究设计中心,武汉430064
模拟电力系统的模拟研究中,柴油机及其调速系统直接影响系统机电暂态过程的准确性,对于判别系统受到大扰动后的暂态稳定和受到小扰动后的静态稳定性具有重要意义。从电站柴油发电机组的运动方程出发,在柴油机及其调速器数学模型的基础上,利用数字仿真计算机实时计算模拟转矩指令,用以控制一套高性能交流调速系统,从而实现电站柴油发电机组中柴油机及其调速器与系统转动惯量的数模混合模拟。实验表明,该模拟系统通用性强,响应速度快,准确性较高。
电力系统;柴油机;调速系统;动态模拟
1 引言
在电力系统模拟研究中,柴油机及其调速器模拟的准确程度直接影响到模拟系统机电暂态过程的真实性和准确性。柴油机及其调速器的模拟通常采用数学模拟方法计算,并由相应的功率放大装置实现其物理功能[1]。根据模型实现方式的不同,常用的模拟系统可分为模拟实现[2-3]和以转速为控制对象的数字实现[4-5]两种方式。
模拟实现方式依赖于模拟电动机和控制系统的物理性能和参数,其数学模型不易改变,通用性较差[6];数字实现方式中的数学模型相对独立,具有较强的灵活性,但它向调速系统发出的是转速指令,调速系统中电动机的转速调节受到转动惯量的制约,转速跟踪是一个较慢的机械过程。因此,模拟系统的输出转速将明显滞后于实际系统,模拟的准确性受到影响。
本文从实际发电机组的运动方程出发,在建立柴油机及其调速器数学模型的基础上,考虑了发电机组轴系转动惯量的补偿,利用数字仿真计算机实时仿真计算,获得模拟转矩指令,用以控制一套高性能交流调速系统,从而实现发电机组中柴油机及其调速器以及系统转动惯量的数模混合模拟。实验表明,该模拟系统通用性强,响应速度快,模拟结果更为准确。
2 模拟系统的设计思想
电力系统模拟研究中,柴油机发电机组的运动方程为:

式中,J1为柴油机发电机组的转动惯量;ω1为柴油机的角速度;Tm为柴油机的驱动转矩;Tf1为柴油机发电机组的空载损耗转矩;Tl1为柴油机发电机组的负载转矩。
由式可知,转动惯量一定时,发电机组的转速因转矩的作用而改变。因此,模拟柴油机及调速器动态性能的关键在于转矩的模拟。在一套由数字仿真计算机、变频器、异步电动机等设备组成的柴油机及调速器模拟系统(图1)中,只要使模拟系统的转动惯量和转矩的标幺值与实际系统的标幺值相等,就可以准确地再现实际系统柴油机及调速器的动态过程[7]。
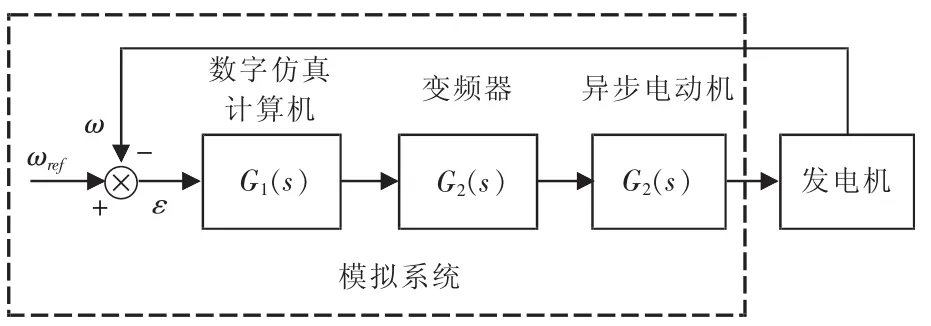
图1 模拟系统的原理框图Fig.1 Functional block diagram of simulator
3 转矩的模拟
式(1)中,柴油机的驱动转矩由柴油机及调速系统的数学模型得到。由若干个线性段逼近实际柴油机速度特性曲线的方法[8]建立柴油机数学模型,建模时考虑柴油机转矩延迟[9]的影响;电子调速器按照其构成原理可视为PID调节器;电磁执行器可视为一阶惯性环节。模拟系统的数学模型如图2所示,图中,k1、k2、T1、T2、T3分别为相应的比例系数和时间常数。
数字仿真计算机按照图2所示的数学模型实时仿真计算得到柴油机的驱动转矩,并按照串行通信协议以转矩的方式控制由变频器和异步电动机构成的高性能交流调速系统实现驱动转矩。
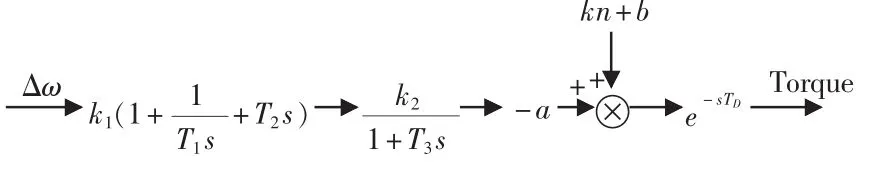
图2 柴油机调速系统数学模型Fig.2 Mathematical model of diesel governor system
模拟系统中电动机转矩的实现为一个响应极快的电磁过程,可以认为模拟系统的驱动转矩是瞬时实现的,忽略其动态过程对模拟系统性能的影响。此时,图1中G2(s)G3(s)=k,即认为变频调速系统仅是一级功率放大装置,用于实现数字仿真计算机实时运算得到的驱动转矩。
柴油机发电机组的空载损耗转矩Tf1由被模拟的实际柴油机发电机组实测得到,并由变频器按照大小为Tf1-Tf2(Tf2为模拟系统中电动机-发电机组空载损耗转矩)的转矩驱动异步电动机实现。
柴油机发电机组的负载转矩由负载的性质决定,负载模拟可以按照相似原理用模拟发电机或其他物理模拟方式实现,这里不作详细讨论。
4 转动惯量的模拟
一般而言,经过标幺化处理的模拟系统转动惯量与实际柴油机发电机组的转动惯量并不相等。必须采取适当的补偿措施才能实现对实际柴油机发电机组转动惯量的模拟。常用的转动惯量补偿方法有飞轮调整法和转矩补偿法[10]等。飞轮调整法简单易行,但调整数值级数较少,且只能增加惯量。转动惯量的转矩补偿法实质上是对模拟系统转动惯量的数字化补偿,较为灵活和通用,可以实现无级补偿。
本文采用基于扩展模型参考自适应(MRAS)的转动惯量转矩补偿方法,对模拟系统转动惯量进行补偿,其原理框图如图3所示。转动惯量的数字化补偿环节同模拟系统中发电机组的转子轴系上的转动惯量一同构成了对实际柴油机发电机组轴系转动惯量的数模混合模拟。必要时还可与飞轮调整法混合使用,具有较强的适应性。
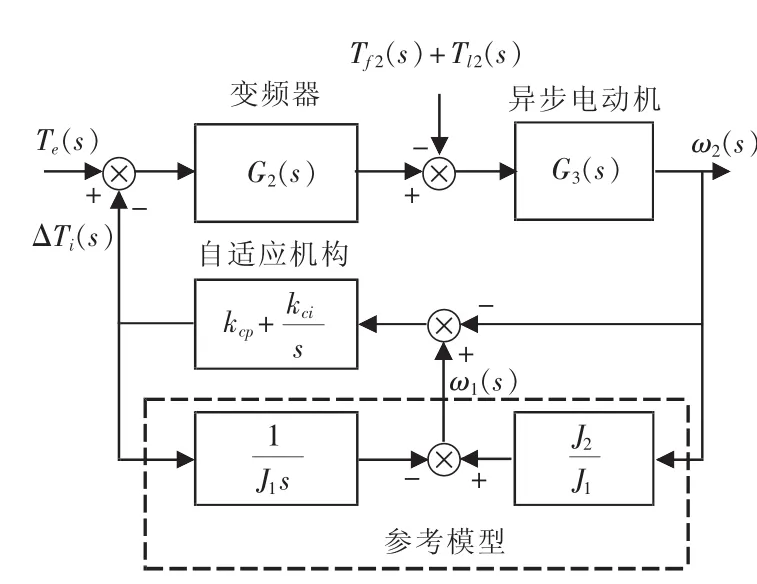
图3 扩展MRAS方法的控制框图Fig.3 Control strategy block diagram based on extended MRAS method
图3中J1为实际系统的转动惯量;J2为模拟系统的转动惯量;Tf2(s)为模拟系统的空载损耗转矩;Tl2(s)为模拟系统的负载转矩;Te(s)为模拟系统的驱动转矩;ΔTi(s)为模拟系统的转动惯量补偿转矩;ω2(s)为模拟系统的角速度;kcp和kci分别为自适应机构的比例系数和积分系数。
扩展MRAS法首先以实际柴油机调速系统为参考模型,估算出当前时刻的目标角速度ω1,然后将测得的模拟系统电动机转子角速度ω2与目标角速度ω1之差经过自适应机构调节,得到模拟系统转动惯量补偿所需的电磁转矩。
由图3可知,扩展MRAS法的转动惯量补偿环节实质上是一个特殊的速度闭环跟踪系统,其传递函数为:
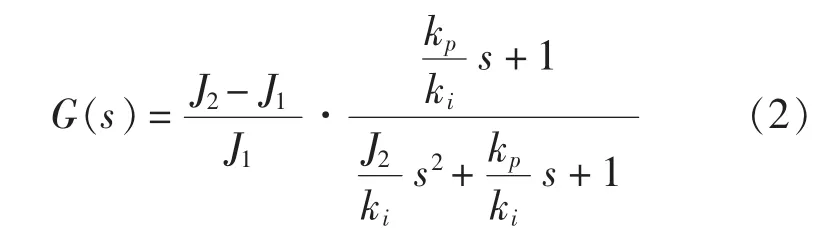
由式(2)可得扩展MARS法转动惯量补偿环节的极点为:

式(3)中J1、J2、kci和kcp均大于零,模拟系统的极点均位于复平面的左半平面,系统稳定。转动惯量补偿环节的时间常数,只要恰当选择自适应机构的积分系数kci就可以使模拟系统中转动惯量补偿环节具有足够快的响应速度,认为模拟系统转动惯量补偿转矩是瞬间实现的,可忽略其动态过程对模拟系统性能的影响。
转动惯量的补偿转矩也由数字仿真计算机实时运算,与柴油机的模拟转矩合成后,按照转矩控制的方式控制高性能交流调速系统实现。
5 模拟系统的构成
按照上述模拟系统设计思想建立的柴油机及调速器仿真平台如图4所示。模拟系统中,数字仿真计算机采用主频为2.4 GHz、内存为256 M的工控机,用于实现上述数学模型的运算并控制变频器驱动异步电动机实现转矩。变频器采用30 kW的西门子MM440矢量控制变频器,用于驱动额定功率为30 kW的异步电动机,作为模拟系统的功率放大装置。工控机与变频器之间的通信按照USS协议由RS-232串行通信完成,每转可以产生600个脉冲的增量式光电编码器与研华PCI1711多功能数据采集卡一同构成模拟系统的转速测量环节,用于模拟系统的转速反馈。
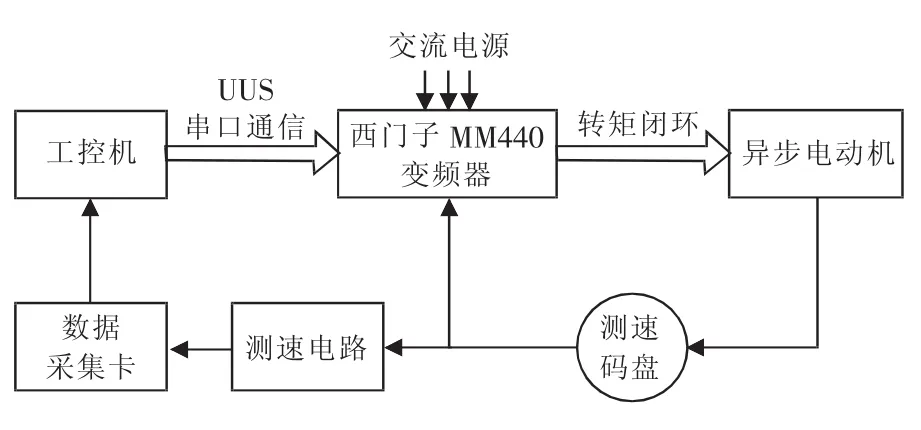
图4 模拟系统的硬件实现Fig.4 Hardware structure of the simulator
6 模拟系统性能的实验验证
采用上述模拟系统对额定功率为3 000 kW,额定转速为1 000 r/min,机组转动惯量为793.127 kg·m2的某型柴油机及调速系统进行模拟,验证系统对实际柴油机及调速系统的模拟能力。分别对模拟系统施加按照0→60%PN→100%PN→0(PN为模拟系统中按照相似原理制造的同步发电机的额定功率)突变的有功负载,实测得到反映模拟柴油机及调速系统动态过程的曲线如图5所示。图5中,负载突变后,模拟系统的转速按照实际柴油机调速系统的特性,经过经短暂的波动后快速恢复到稳定状态。运算得到反映柴油机调速系统动态性能的瞬态调速率和稳定时间如表1所示。
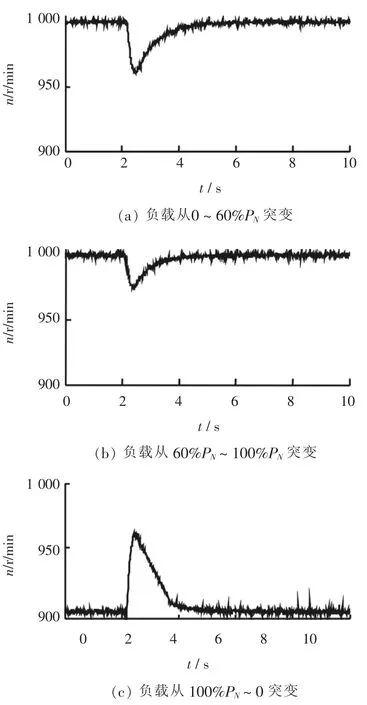
图5 模拟系统的动态性能实验曲线Fig.5 Measured dynamic characteristics curves of the simulator
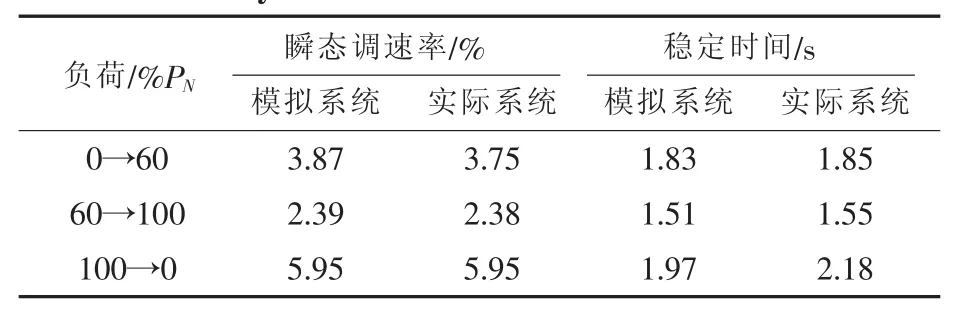
表1 模拟系统的动态特性Tab.1 Dynamic characteristics of the simulator
表1中,模拟系统的瞬态调速率和稳定时间的相对误差均小于5%,模拟效果较好,基本上可以反映出实际柴油机调速系统的动态过程。
7 结论
本文提出基于转矩跟踪和转动惯量补偿的数字化模拟系统,实现了对柴油机及其调速器动态过程的准确模拟,可用于研究各种情况下电力系统机电暂态过程。在本模拟系统中,通过更换不同的数学模型,也可模拟其他种类的原动机和调速器,例如,水轮机、汽轮机和风力机等陆用大型电力系统中原动机及其调速器。此外,类似的系统也可应用于船舶推进、汽车动力等领域的研究。
[1]《中国电力百科全书》编辑委员会.中国电力百科全书(电力系统卷)[M].北京:中国电力出版社,2001:127-128.
[2]吴国瑜.电力系统仿真 [M].北京:水利电力出版社,1987:59-116.
[3]清华大学动态模拟实验室工作组.电力系统动态模拟实验室[M].北京:清华大学出版社,1960:18-223.
[4]林桦,常风云.船舶电站原动机及调速系统的混合仿真[J].海军工程学院学报,1997,9(3):7-11.
[5]邵淼磊,王之杰,王硕丰,等.船用柴油发电机组及其调速系统的动、静态仿真[J].船舶工程,2003,25(2):34-36.
[6]曾明.可控负荷模拟器在电力系统动态模拟中的应用研究[D].长沙:中南大学,2009:1-5.
[7]张安明,柴建云,王善铭,等.电力系统动态模拟中发电机组转动惯量的补偿[J].清华大学学报(自然科学版),2006,46(10):1661-1664.
[8]黄曼磊,唐嘉亨,郭镇明.柴油机调速系统的数学模型[J].哈尔滨工程大学学报,1997,18(6):20-25.
[9]SONG Q W,GRIGORIADIS K M.Diesel engine speed regulation using linear parameter varying control[C]//Proceedings of 2003 American Control Conference.Piscataway.NJ:IEEE Press,2003.
[10]CHAI J Y,YANG K,LIU C W,et al.Inertia simulation by torque compensation in a wind turbine simulator[C]//ICEMS.Korea,2004.
Simulation Study on Diesel Engine Speed Governor
Zhang An-ming1Li Yu-sheng1Wang Wei2
1 Military Representative Office in Dalian Shipbuilding Industry Co.Ltd,Dalian 116005,China 2 China Ship Development and Design Center,Wuhan 430064,China
electric power system;prime mover;speed governor system;dynamic simulation
TM743
:A
:1673-3185(2011)04-92-04
2010-07-03
“十一五”海装预先研究项目
张安明(1976-),男,硕士,工程师。研究方向:舰船电气。E-mail:zhanganming@tsinghua.org.cn
李玉生(1977-),男,工程师。研究方向:舰船电气。E-mail:liyusheng@sina.com.cn
王 伟(1977-),男,工程师。研究方向:舰船电气。E-mail:Hust_ww@163.com
10.3969/j.issn.1673-3185.2011.04.020
Abastract:In the research of power system simulation,the accuracy of machine electricity transient study mainly depends on the precision of prime mover and governor system simulation,which plays important role in the power system research on transient stability and static stability when disturbance occurs.Based on the equation of motion,the torque was calculated by method of digital simulation to control the government system.The engine inertia and government system was simulated by the method of hybrid simulation.The results show that this simulation can fulfill the requirements of faster responds and higher accuracy.
猜你喜欢
高师理科学刊(2020年2期)2020-11-26 06:01:32
四川工商学院学术新视野(2020年2期)2020-08-13 03:18:34
电子制作(2018年1期)2018-04-04 01:48:22
电子制作(2017年23期)2017-02-02 07:16:50
水电站机电技术(2016年1期)2016-02-28 14:21:36
合成技术及应用(2015年3期)2015-12-11 08:36:27
焊接(2015年1期)2015-07-18 11:07:32
水电站机电技术(2014年4期)2014-10-13 08:30:03
水电站机电技术(2014年3期)2014-09-26 12:01:15
振动、测试与诊断(2014年4期)2014-03-01 01:14:01