基于PID的电液比例径向柱塞泵仿真控制与分析
2011-03-30 02:50王传红
装备制造技术 2011年9期
王传红
(扬州职业大学机械工程学院,江苏 扬州 225002)
基于PID的电液比例径向柱塞泵仿真控制与分析
王传红
(扬州职业大学机械工程学院,江苏 扬州 225002)
针对电液比例控制径向柱塞泵变量机构,设计了基于PID神经元网络控制算法的控制器,并通过计算机仿真,再现了系统跟踪变量控制信号的系统响应,仿真结果表明,基于PID神经元网络控制算法控制器的电液比例控制径向柱塞泵,具有良好的控制性能。
径向柱塞泵;电液比例控制;PID神经元网络
随着现代工业的快速发展,对生产中的环保和节能要求在提高。径向柱塞泵主要零件处于被压状态,使材料强度性能得到充分利用,被广泛应用于矿山、工程等领域中。PID神经元网络(PIDNN,Proportional-Integral-Derivative Neural Network)是在神经元网络和传统PID控制基础上,把两者进行结合,在其基础上定义了比例、积分、微分功能的神经元,从而将PID算法与神经元网络中进行组合,克服了神经元网络学习收敛速度慢和PID算法在复杂多变量非线性系统中难以应用的缺点,从而达到优化系统的目的。
径向柱塞泵控制系统具有非线性、时变特性的特点,因此选用PID神经元网络便成了建立径向柱塞泵控制系统的重中之重。本文探讨将此种新的控制方式——PID神经元网络控制算法引入到径向柱塞泵的控制系统当中,并对其未来的实用化做一理论上的验证与分析。
1 径向柱塞泵控制系统的原理和数学模型
电液比例径向柱塞泵的工作原理,是通过系统改变系统负载的变化,从而来改变负载传感阀两端的压差,改变径向柱塞泵两端变量控制机构(活塞)的控制压力大小,达到改变定子和转子之间的偏心量大小的目的,从而实现柱塞泵输出流量和压力的变化。
从本质上来说,电液比例径向柱塞泵通过电液比例阀来控制液压缸,即可以将其控制模型简化为阀控缸模型。阀控缸模型含有3个基本的方程,分别为:
(1)阀的阀心力平衡方程;
(2)阀的流量连续方程;
(3)液压缸与负载的力平衡方程。
联立三个方程并进行拉氏变换,便可以得到电液比例径向柱塞泵控制系统的传递函数以及方框图。
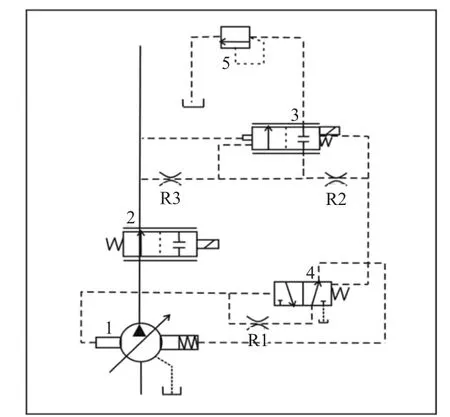
图1 电液比例径向柱塞泵控制系统原理图
本文从压力和流量两方面控制入手,来建立4组控制方程组,进行流量和压力的控制。由于文章篇幅有限,本文只从压力控制入手来说明。
系统压力控制传递函数方程组(1):

式中,
x(s)为压力阀阀心位移量的传递函数;
y(s)为负载阀阀心位移量的传递函数;
z(s)为径向柱塞泵变量控制机构位移量的传递函数;
I(s)为输入电流量的传递函数;
Px(s)为压力阀弹簧腔压力量的传递函数;
P2(s)为动态液阻R2反馈压力的传递函数;
Ps(s)为系统负载压力的传递函数;
Pz(s)为径向柱塞泵活塞腔压力的传递函数;
Fxy(s)为径向柱塞泵活塞腔所受变量力的传递函数。
系统压力控制传递函数方程组(2):

式中,
Py(s)为负载阀弹簧腔压力量的传递函数;
Qx’(s)为压力阀弹簧腔溢出流量的传递函数;
Qν2(s)为通过动态液阻R2流量的传递函数;
Qνy(s)为进入径向柱塞泵活塞腔流量的传递函数;
Qνy’(s)为负载阀出口回油流量的传递函数。
2 PID神经元网络控制器的设计
PID神经元网络控制方法,是在神经元控制基础中,定义了有比例、积分、微分功能的神经元,把PID控制规律与神经元网络进行组合,神经元的输入—输出函数,分别为比例、微分、积分函数。
PID神经元网络的结构形式,随着网络输出量个数的增加而进行变化,其基本形式是一个3层前向神经元网络,分别为输入层、中间层、输出层,为2×3×1的网络结构。
其输入层为2个神经元,主要功能是接收输入信息;
中间层有是3个神经元,分别为比例元、积分元和微分元,完成比例、积分和微分运算;
其输出层为1个神经元,来完成控制规律。
PID神经元网络的各层神经元个数、连接方式和连接权重,是按PID控制规律的原则进行设定;根据其误差反向传播算法,来对权重进行修改,通过在线训练和学习来调整3个参数KP、KI和KD,从而实现系统目标函数最优化。其结构形式,可见图2所示,PID神经元网络控制系统结构图,如图3所示。
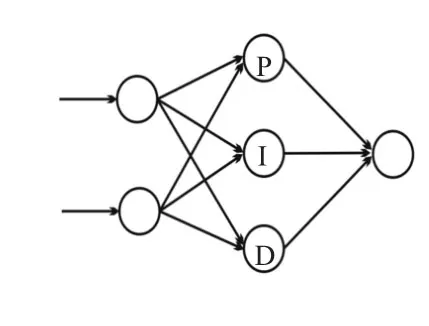
图2 PID神经元网络结构形式
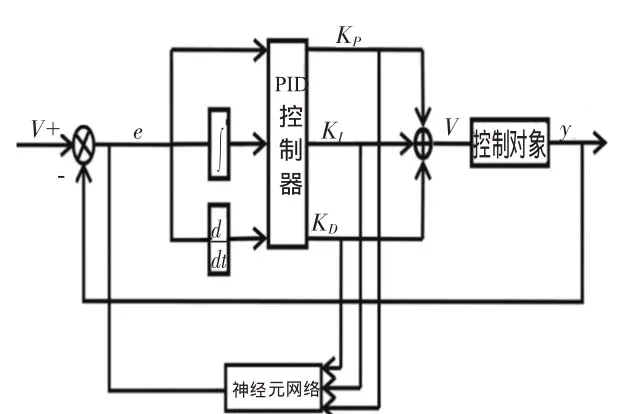
图3 PID神经元网络控制系统结构图
3 仿真分析
图4是采用的压力控制阀、负载传感阀的阀芯运动部分的力平衡方程,以及径向柱塞泵的变量控制机构活塞腔的力平衡方程,组成一个三变量方程所进行压力控制时的状态响应图。
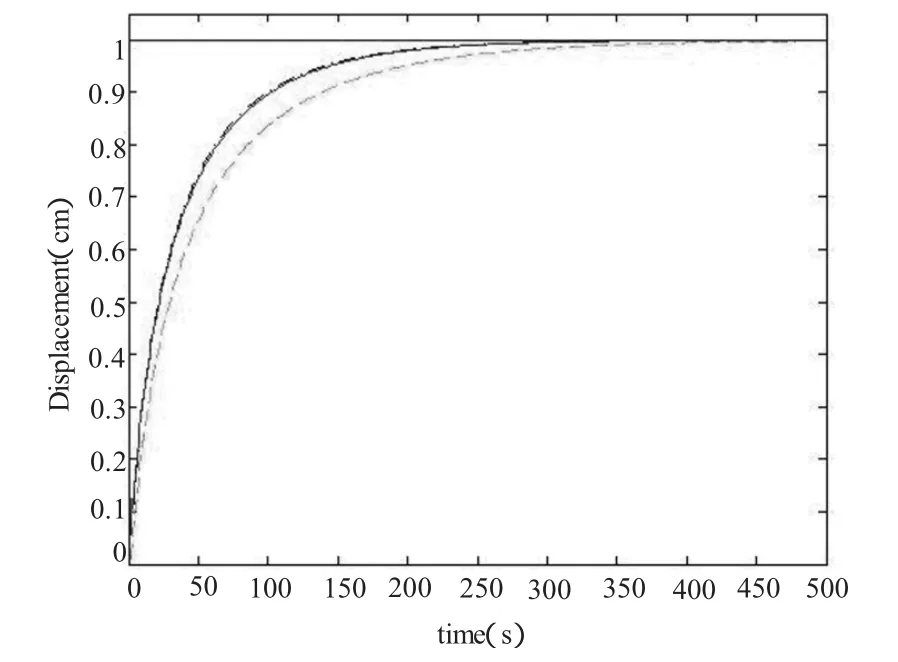
图4 压力控制系统状态响应图(1)
我们可以从图中看到,在利用平衡方程进行压力控制时,系统能够在极短的时间内达到稳定状态,几乎无超调发生。与传统PID控制相比,PID神经元网络控制算法具有响应速度快,自适应能力强,抗干扰能力强等优点。

图5 压力控制系统状态响应图(2)
图5是采用压力控制阀、负载传感阀的流量连续性方程,以及径向柱塞泵的变量控制机构活塞腔流量连续性方程,组合成为一个三变量耦合方程,所进行系统压力控制时的状态响应图。
4 结束语
采用PID神经元网络控制方法,来控制径向柱塞泵变量控制系统与采用传统PID控制方法的径向柱塞泵变量控制系统,两者进行比较:后者具有稳定性更高、稳态误差更小、抗外负载干扰能力强等优点;但在动态性能方面,响应时间稍慢,不过与此同时降低了超调量,减小超调时间。
因此,我们可以得出以下结论:采用PID神经元网络控制方法的径向柱塞泵变量控制系统,性能要优于采用传统PID控制方法的径向柱塞泵变量控制系统。PID神经元网络控制,可以满足具有非线性、时变特性的径向柱塞变量泵在系统控制方面的要求。
本课题所研究的控制方法,可以为PID神经元网络控制方法应用于工业液压系统,为其做了理论上的准备,有很好的实践应用价值。
[1]舒怀林.PID神经元网络及其控制系统[M].北京:国防工业出版社,2006.
[2]卢伯英,于海勋.现代控制工程[M].北京:电子工业出版社,2003.
[3]张化光,孟祥萍.智能控制基础理论及应用[M].北京:机械工业出版社,2005.
[4]路甬祥.电液比例控制技术[M].北京:机械工业出版社,1988.
[5]吴根茂,邱敏秀,王庆丰.新编实用电液比例技术(A版)[M].杭州:国家电液控制工程技术研究中心,2004.
[6]路甬祥.液压气动技术手册[M].北京:机械工业出版社,2004.
[7]成大先.机械设计手册单行本·液压控制[M].北京:化学工业出版社,2004.
[8]刘金琨.先进PID控制MATLAB仿真(第2版)[M].北京:电子工业出版社,2007.
The Simulation Control and Analysis of the Electro-hydraulic Proportional Radial Piston Pump based on PID Neural Network
WANG Chuan-hong
(The Mechanical School of Yangzhou Polytechnic College,Yangzhou Jiangsu 225002,China)
Coming up with the stroking mechanism of the Electro-hydraulic proportional control for radial piston pump,a controller based on the PID neural network control algorithm was designed.And representation the system response of system variable control signal of system track through computer simulation.The simulation result shows that the controller for the Electro-hydraulic proportional Radial Piston Pump based PID neural network control algorithm has a good control performance.
radial piston pump;electro-hydraulic proportional control;proportional-Integral-derivative neuralnet work
TP273
A
1672-545X(2011)09-0034-03
2011-06-14
王传红(1972—),男,江西景德镇人,技师,主要研究方向:液压与数控技术。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
农业工程学报(2022年10期)2022-08-22
灌溉排水学报(2022年6期)2022-07-13
北京航空航天大学学报(2022年6期)2022-07-02
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
装备制造技术(2020年3期)2020-12-25
水泥工程(2020年4期)2020-12-18
煤气与热力(2020年8期)2020-09-08
专用汽车(2016年4期)2016-03-01