
基于龙门吊大车的定位算法研究
2011-03-23 09:31熊巧文李文锋葛艳红董文涛
湖北工业大学学报 2011年4期
熊巧文,李文锋,葛艳红,董文涛
(武汉理工大学物流工程学院,湖北 武汉 430063)
露天货场的业务运营过程中,不可避免地存在货物翻堆现象,这种现象在剪板加工区存放的热卷上尤为频繁.由于操作人员没有及时记录钢卷位置,导致货物实际位置与系统信息不一致,给查找货物带来不便.特别是对于翻堆次数多的钢卷,可能很难将它找到[1],要设计一种货物自动定位系统,实现信息系统和货场的衔接.本文即基于此需求,研究一种基于龙门吊定位的定位算法,实现对龙门吊的准确定位.
1 轨道式龙门吊大车运行定位
轨道式龙门吊跨度较大,堆码层数多,能充分利用场地面积,适应于场地面积较小但较方正的仓库专用堆场.轨道式龙门吊是沿着场地上的轨道行走的,因此只能限制在设有轨道的场地范围内进行作业.轨道式龙门吊定位能力较强,较易实现全自动化装卸.
龙门吊大车定位系统包括控制器、位置传感器、无线发送模块以及数据中心,实现对龙门吊位置信息实时采集和处理,并存储数据.核心控制器采用研华工控机,位置传感器选用NovAtel公司的GPS,安装在龙门吊大梁一端.控制器与各个传感器模块之间采用串口通信,货场前方与数据中心之间通过无线GPRS方式通信[2].数据中心部分主要完成数据库信息管理及人机交互等功能.
2 GPS定位
2.1 差分GPS
差分GPS(Differential Global Positioning System,即DGPS),就是用两台接收机于两个测站上同时测量来自相同GPS卫星的导航定位信号,以联合测得移动站用户的精确位置.其中一个测站位于业已测定的已知点,设在该已知点(基准点)的GPS信号接收机为基准站接收机.它和安装在移动载体上的GPS信号接收机(简称为移动站接收机)同时测量来自相同GPS卫星的导航定位信号.基准站接收机所测得的三维位置与该点已知值进行比较,便可获得GPS定位数据的改正值.如果及时将GPS改正值发送给若干台共视卫星用户的移动站接收机,而改正后者所测得的实时位置,这叫做实时差分动态定位;若用GPS改正值对若干台共视卫星用户的动态接收机所采集的定位数据进行测后修正,称之为后处理差分动态定位.由于这种改正能将公共误差(如卫星轨道误差、SA影响、大气影响等)抵消,从而提高了定位精度,使实时定位精度从100 m提高到3~5 m[3].图1为差分动态定位的原理图.
2.2 带约束的卡尔曼滤波算法
伪距差分精度3~5 m还达不到区分每个钢卷的使用要求,这就需要进一步提高定位精度.通过分析,龙门吊在行驶过程中本身存在着一些约束条件,充分利用这些约束条件有可能提高GPS定位精度和系统的可靠性.以龙门吊轨道的直线方程作为定位滤波的约束条件,建立带轨道约束条件的系统模型,并推导约束条件下的卡尔曼滤波方程.
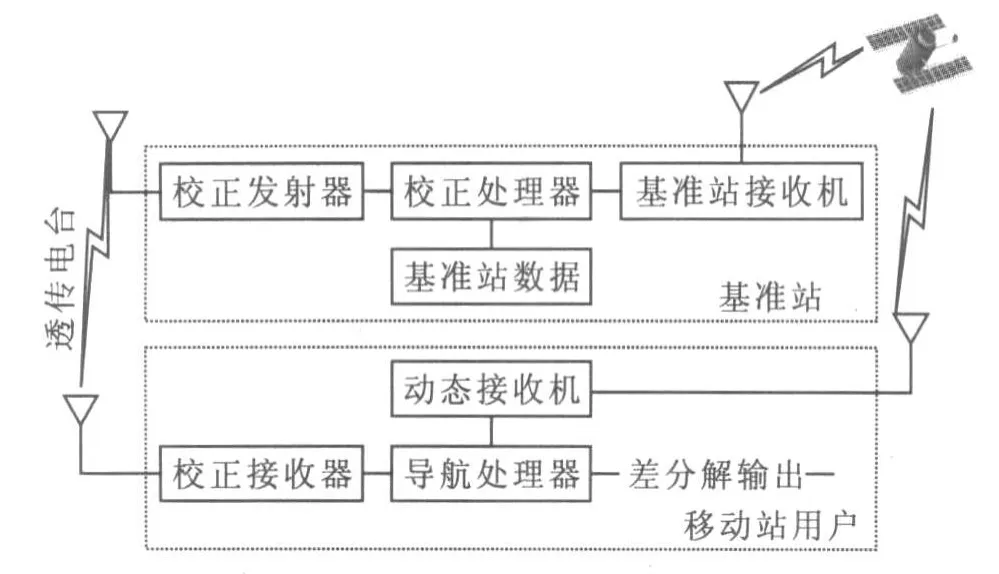
图1 差分动态定位的原理图
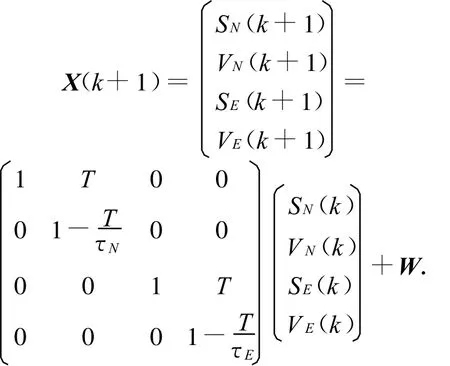
2.2.1 状态方程 考虑龙门吊大车在平行轨道上运行,取轨道面这个二维平面坐标系建立运动方程.为了确定龙门吊的位置和速度,系统状态变量可以选取:

这里SN,,VN和SE,VE分别为龙门吊在纬度和经度方向上的位置和速度分量.
系统的状态方程可以写成:

其中:
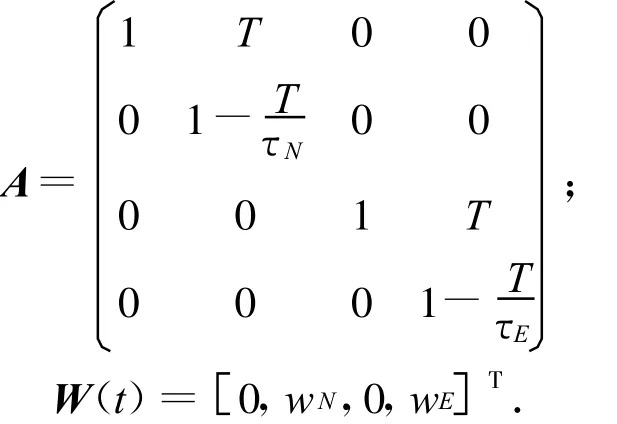
这里wN和wE分别为均值为0,方差为q2N、q2E的高斯白噪声.
离散化后得到离散状态方程:
观测方程为:

其中V为观测噪声,均值为0,方差为R.
引入约束条件轨道直线方程:y=d·x+m,那么约束方程可以表示为:

写成矩阵形式为

2.2.2 卡尔曼滤波方程的推导 由于状态方程存在约束条件D·X=M,滤波的目的就是在满足

的条件下[4],使得D· X=M.由于有:

建立拉格朗日方程:
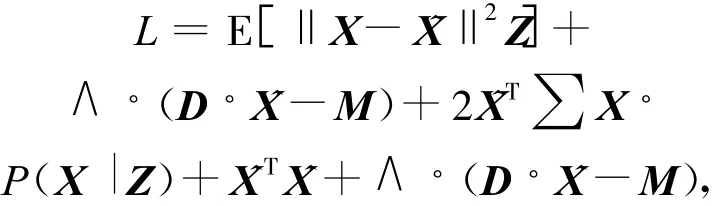
又因为卡尔曼滤波估值可以表示为 X= ∑X·P(X|Z),则有

求偏导得到
解得

得到带约束条件下的卡尔曼滤波递推公式:
3 实验结果
为了检验上述方法的有效性,本文进行了实测数据试验.实验数据资料取自2010年7月19日在武汉某物流公司实际运行所纪录的数据,共500个历元,图2是实测滤波轨迹曲线图.为了分析方便,对图中纵坐标作了放大.其中曲线1为真实轨迹,曲线2为观测轨迹,曲线3为带约束条件的卡尔曼滤波后的轨迹.

图2 实测滤波轨迹曲线
从图2可以看出,观测结果受观测噪声影响较大,与真实路线出现较大偏差.采用带约束条件的卡尔曼滤波算法后,观测结果偏离真实路线的现象得到了改善.
图3是误差曲线,可见采用带约束条件的卡尔曼滤波算法后,滤波精度明显提高.
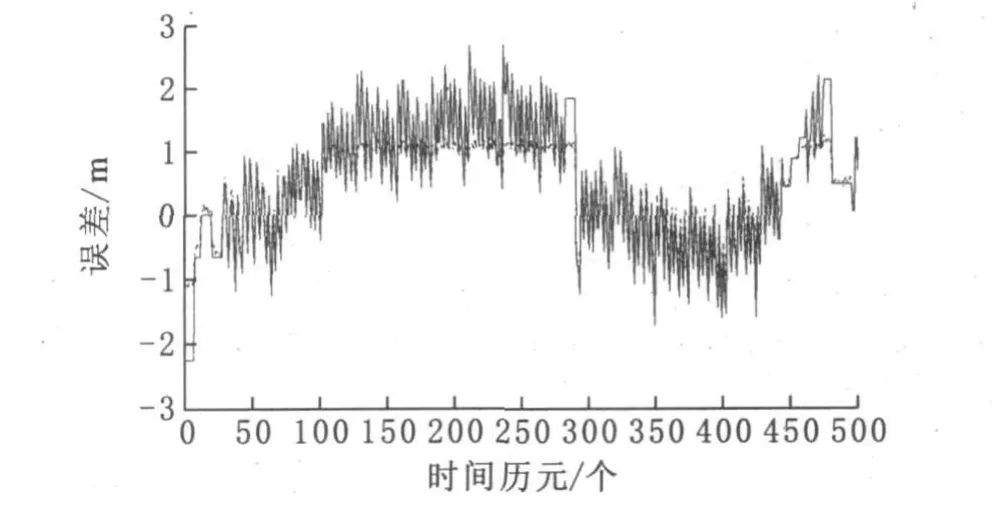
图3 误差曲线
4 结束语
本文研究了一种基于龙门吊大车定位的定位算法,其中定位系统采用GPS和绝对式旋转编码器等位置传感器,实现对龙门吊大车定位,是实现信息系统和货场衔接的基础.通过运用带约束条件的Kalman滤波算法,提高了差分GPS的定位精度,实现了对龙门吊大车的准确定位.
[1]梁红贞.钢铁企业物流管控系统研究与实现[D].长沙:湖南大学图书馆,2006.
[2]王俊佳.基于GPRS的工业现场数据控制器研究[J].计算机应用研究,2005(11):92-93.
[3]房建成.GPS动态滤波新方法[J].中国惯性技术学报,1997(5):4-7.
[4]Samer S Saab.Discrete-Time Kalman Filter under Incorrect Noise Covariances[C]//Proceedings of the A-merican Control Conference,Jun.1995:1152-1156.
猜你喜欢
电机与控制应用(2022年4期)2022-06-27
快乐语文(2020年36期)2021-01-14
中国特种设备安全(2018年10期)2018-12-18
Frontiers of Nursing(2018年1期)2018-05-21
启蒙(3-7岁)(2017年9期)2017-02-26
石油化工建设(2015年6期)2015-12-01
石油化工建设(2015年6期)2015-12-01
城市道桥与防洪(2013年7期)2013-03-11
幼儿智力世界(2004年5期)2004-05-27
