
基于UG NX7.5的离合器机构的运动仿真研究
2011-03-23 09:30何毅斌
湖北工业大学学报 2011年4期
邱 宇,何毅斌
(武汉工程大学机电工程学院,湖北 武汉 430073)
UG软件是美国EDS公司推出的大型CAD/CAE/CAM 软件,主要为汽车与交通、航空航天、日用消费品、通用机械及电子工业等领域通过其虚拟产品开发的理念提供多极化集成的企业级产品与服务在内的完成MCAD解决方案.其中计算机辅助设计(CAE)包括有限元分析和机构分析两大内容.机构分析模块可以提供静态、运动、动力学计算以及动态仿真等功能,主要包括运动分析和力的分析;其运动分析采用了美国MDI公司开发的ADAMS结算器.其实两者是密切相关的,前者先不考虑作用在机构的力,并通常假定原动件作等速运动,只从几何上分析机构的位移,速度和加速度等运动情况[1].离合器是主、从动部件在同轴线上传递动力或运动时,具有接合或分离功能的装置,其类型很多,按接合元件的性质可以分为啮合式与摩擦式两大类[2].本文是采用的摩擦式离合器进行分析.
1 离合器运动仿真
1.1 离合器的建模
这里采用的是单盘摩擦离合[3]对离合器机构进行建模.运用UG对离合器各个零件的参数设定一个初值,创建各个零件:脚踏板、传递杆、滑动杆、从动轴、从离合器摩擦片、主离合器摩擦片和转轴,初值的合理性可以通过后期运动仿真分析来优化处理.
1.2 离合器的装配
装配设计是把零件组装成部件或产品模型,通过配对条件在各部件之间建立约束关系,确定其位置关系,建立各部件之间链接关系的过程.为了在装配件中实现对组件的参数化定位,确定组件在装配件中的相对位置,在装配过程中采用配对条件的添加组件定位方式来指定组件之间的定位关系[4].配对类型包括:配对 、对齐 、角度 、平行 、垂直、中心、距离、相切.本文离合器装配结果如图1所示.
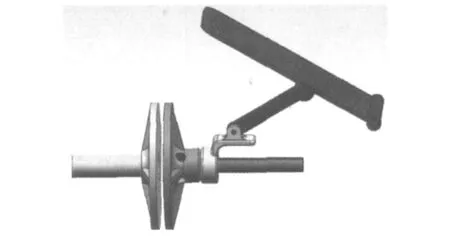
图1 离合器模型
1.3 离合器运动仿真
完成离合器建模后,即进入运动仿真模块,运动仿真模块自动复制主模型的装配文件,在资源导航器中选择“运动导航器”,创建一新文件motion 1.sim(此时所看到的显示模型已不是第一次打开的装配主模型),且自动处于工作层状态.
1.3.1 创建连杆 在新建的运动仿真方案中创建6个连杆(Links),在视图区选择主离合器片和转轴为连杆L001,从离合器片为连杆L002,滑动杆为连杆L003,传递杆为连杆L004,脚踏板为连杆L005,从动轴为连杆LOO6.各连杆如图2所示.

图2 各连杆
1.3.2 创建运动副 离合器模型需要创建7个运动副.连杆 LOO2、LOO3分别为滑动副,其余的5个为旋转副.其中创建从离合器片的滑动副JOO2,需咬合连杆LOO6.创建主离合器片旋转副JOO1,并加上驱动,旋转类型选为恒定,初速度键入800.各运动副如图3所示.

图3 离合器运动副
1.3.3 创建连接器与力 定义运动副后,还需要定义必要的力和各种力的传递.脚踏离合器所需要的里、两离合器的3D接触、滑动杆与从离合器片的3D接触、滑动杆的阻尼力.其中主离合器片与从离合器片的3D接触需要打开库仑摩擦.其相关参数如图4所示.
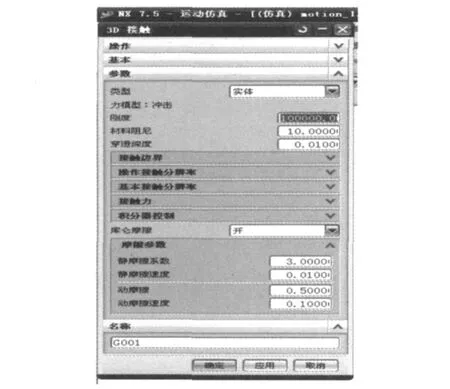
图4 设计参数
1.3.4 动画分析 完成运动副的创建接下来解算模型的运动是否符合要求,以及运动的相关参数输出和调整.单击“运动”工具栏的【结算方案】,在选项卡文本框输入时间2.5 s,步数为2500,点击确定.由于多个3D的存在,解算时间比较长,可以适当调整较大的误差、步长等加快解算过程.一般存在3D接触解算的步数是时间的1000倍,否则仿真失真.
1.3.5 图标输出 完成离合器的解算,可以使用图标命令得出必要的参数在运动过程中的变化.本文对从离合器片的受力,转动的角速度,转动的X方向位移进行分析.

图5 受力曲线
从图中可以看出在0.25 s以后两离合器片接触,由于摩擦、阻尼等诸多因素的影响使接触力不恒定,在0.5 s后接触力保持恒定状态.

图6 速度曲线
从速度曲线中可以看出在0.25 s以前从离合器片在脚踏板力的传递下滑动速度稍慢.0.25 s时两离合器片接触,由于摩擦力的作用,从离合器片的速度瞬间提升.0.25 s后两离合器片接合,速度接近与主离合器初速度.

图7 位移曲线
从位移曲线图中可以看出0.25 s前,从离合器片在从动轴上滑动,0.25 s以后从离合器片只有转动,在X轴上无位移.结合三曲线可初步看出,此离合器在以初值建的模型中,在机构方面还是合理的.
2 结束语
本文通过离合器一例,介绍了UG运动仿真模块的操作,使人们了解了计算机辅助分析的方法.得出机构在运动过程中的规律和特性,通过对这些规律和特性的分析,这样就能够及早的发现机构设计中的缺陷,实现优化设计,同时提高了设计质量,降低了研究开发的成本,缩短了研究开发的周期.
[1]郑立斌,陈全园,李轲.基于UGNX4.0的连杆机构运动学仿真[J].科学技术与工程,2007,7(19):53-54.
[2]周明衡.离合器、制动器选用手册[M].北京:化学工业出版社,2003.
[3]濮良贵,纪名刚等.机械设计(第八版)[M].北京:高等教育出版社,2008:355.
[4]张云杰.UGNX4.0基础教程中文版[M].北京:清华大学出版社,2007:218.
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
装备制造技术(2020年2期)2020-12-14
制造技术与机床(2018年11期)2018-11-23
意林(绘英语)(2018年1期)2018-04-28
汽车实用技术(2017年16期)2017-09-21
工业设计(2016年11期)2016-04-16
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
城市轨道交通研究(2015年11期)2015-02-27
雷达学报(2014年4期)2014-04-23
