实时肌电信号采集系统设计与探究
2011-03-19 03:43周丽娜
黑龙江大学工程学报 2011年1期
尤 波,周丽娜,黄 玲
(哈尔滨理工大学 自动化学院,哈尔滨 150080)
0 引 言
早在1791年,Galvani[1]通过一系列蛙类的肌肉收缩研究,证明了肌肉的收缩与电信号有关。随着电子技术的发展、电子计算机的出现和迅猛发展以及神经肌肉生理学研究的进展,新的检测和记录技术已经使人们可以对肌电信号和神经肌肉功能的关系进行极为细致的研究。由于表面肌电信号检测具有无创性,并且作为控制信息源,是利用人体本身的生理方式去控制,直观自然,已经被广泛应用在假肢、康复医学工程及体育运动等方面的研究中[2]。
传统的肌电信号识别方法都是利用动作信号的稳态值进行处理[3],然而,每一个实际的任务都需要多个连续动作的配合才能完成。这就要求肌电信号采集系统能够将采集到的多个动作的数据进行实时的处理、分割、提取特征并进行区分[4]。肌电信号是一种幅值为100~5 000 μ V的微弱电信号,常常被噪声淹没,为了提取该信号必须设计抗干扰电路[5]。本文首先设计一个肌电信号采集系统,并利用该系统采集到人体手部连续动作的数据信息,对肌电信号的分析处理部分则重点对动作的转换进行了分析研究。
1 肌电信号采集系统总体结构设计
肌电信号采集及处理系统完成了从数据采集到动作分类的整个过程。包括对肌肉运动信号的采集、信号数据的处理、特征提取及对动作分类识别4个主要部分,各个部分之间相辅相成,其整体规划流程见图1。

图1 系统整体规划Fig.1 Whole plan of the system
肌电信号从人体上臂肌肉表面提取到以后,要经过放大、滤波以及模数转换处理,鉴于肌电信号的复杂性,不能直接从肌电信号分析出手臂的动作,还需要进一步的处理。因此,在进行分类之前,要对信号的特征进行提取,将所提取到的特征向量输入到分类器中进行分类识别,完成整个过程。
由于肌电信号非常微弱,极易受到噪声的影响。因此受测试者的身体状态,硬件设备的选择、系统的抗干扰性能等都是影响数据采集系统性能的关键因素。
1.1 受测试者身体状态对肌电信号的影响
不同的受测试者由于肌肉的发达程度,皮肤表面的电阻值以及体内液体的导电能力等因素的不同,一般情况下其电位幅值是不同的,并且,同一个人在1 d中的不同时刻的电位幅值也有明显的不同,因此,所设计的采集分类系统的具体参数要因人而异。在采集数据过程中还要注意:①在测试时,人体手部不断的进行握拳伸展动作,时间过长时,肌电信号就会随着体能的减弱而逐渐变微弱,因此测试时间一般要限定在一定时间内;②测试时样本的生理状态对肌电信号的影响较大,由于人体电信号是通过血液传输的,因此,血液浓度的大小会影响传导速度,而血液浓度的大小与人体摄入水的多少有关,摄入体内的盐分多,血液浓度就大,电信号的传导速度也就大,所以,在采集数据时对受测试者的饮食要适当控制;③电极的位置也会对数据采集造成影响,重复实验时,要注意不同次粘贴电极的位置要尽量保持一致;④为了尽最大幅度采集到人体表面的电位同时降低共模抑制比,肌电的电极一般都是顺着肌纤维的方向成对使用。
1.2 系统硬件设计
有实验表明[6],表面肌电信号是一种非常微弱的电信号,其信号幅值为100~5 000 μ V,均方根为0~1.5 mV,表面肌电信号的频率主要集中在1 000 Hz以下,一般有用的信号频率为0~500 Hz,其中大部分能量集中在50~150 Hz,利用双极型模型得到的肌电频谱分布在 20~500 Hz,针电极肌电放大器的频带一般设置为10~1 000 Hz。
肌电信号的特性决定了数据采集系统的要求:①为了采集到有效的信号,采样频率应该为1 000 Hz;②由于对肌电信号进行特征分类时,所需要的信息量特别大,所以要有足够的存储空间,也就是缓冲区也要尽量大;③为了保证数据的传输速度,AD转换器与主机之间的数据传输速度要快,普通的串口很难保证速度的要求;还要有足够多的通道,以便同时对人体上臂不同的肌肉进行采集;④由于肌电信号非常微弱,所以采集卡的分辨率一定要足够高。
为此设计了一款专用于肌电信号采集的数据采集系统,该系统采用了北京阿尔泰科技发展有限公司的PCI8622数据采集卡,该采集卡的输入量程为±5 V,采样速度为1 Hz~250 kHz,采样通道最大32路,放大倍数最大可达8倍,转换精度是16 Bit,输入阻抗10 M Ω,采用的是双端输入方式;电极采用的是江苏省丹阳假肢厂提供的电极,该电极体积小,使用方便,对测试者无伤害。电极内置放大滤波电路,其放大系数可调。通常情况下,设置电极放大倍数为1 000。
1.3 硬件抗干扰设计
在系统设计时,除考虑到系统的功能和实时性之外,可靠性也是要重点考虑的问题之一。特别是肌电信号本身微弱,更容易被噪声淹没。通常硬件抗干扰的措施有串模干扰的抑制、共模干扰的抑制、输入输出通道干扰的抑制、电源与电网干扰的抑制以及地线系统干扰的抑制5个方面[7]。在本试验中,实验室里50 Hz的工频干扰非常大,考虑到系统的实际情况,本实验采用了以几个方面的硬件抗干扰措施:
1.3.1 采用性能良好的稳压电源
由于仪器供电可能会对电极产生干扰,故需要给电极提供稳定的直流5~8 V电源,由于普通的开关电源干扰很大,而线性电源具有纹波噪声小的特点,故本实验中采用的是线性电源。
1.3.2 在表面电极与采集卡之间设计抗干扰电路
在信号传输过程中,从电极到采集卡之间的距离有2 m,由于肌电信号极为微弱,即便很小的干扰也会对信号的采集造成严重的影响,而信号在传输过程中通常存在3种串模干扰,即信号源(即电极)本身产生噪声,传输线的接插头产生的干扰和传输线附近的高频电磁场在传输线上产生的串模干扰。针对实验室的实际情况,所采取的抗传输线路上的串模干扰的措施是在接收端加上滤波器。由于肌电信号的频率为10~500 Hz,而影响最大的工频干扰是50 Hz,故在信号接收端 (也就是采集卡输入信号端)加一个典型的双 T式滤波器(BEF),同时也加上高通和低通滤波器以便同时滤掉<1 Hz,>500 Hz的噪声信号。
1.3.3 采用屏蔽电缆切断信号传输线上耦合产生的串模干扰
使用屏蔽电缆可以有效地屏蔽高频辐射干扰的影响,将传输线外面的屏蔽层有效地接地,从而使其内部的传输线不受辐射的干扰。
1.3.4 接 地
接地是提高系统可靠性所必须具备的技术之一,本实验中要求受测试者与采集设备共地才能采集到准确的数据。
2 数据的采集及传送设计
2.1 电极具体位置的选择
通过查阅医学方面的书籍[8]发现,人体上臂的桡侧腕屈肌和指深屈肌对人体手部动作起到非常重要的作用。因此,如果想要对手部动作进行识别,对这两块肌肉进行测量,将会得到较好的效果,具体位置见图2。

图2 电极具体位置Fig.2 Particular position of electrodes
2.2 对受测试者的要求
在知情并理解的情况下参与表面肌电信号的采集;测量前无剧烈运动,无酸痛现象;测量过程中,尽量保持舒服的姿势;健康青年人,20~30岁。
2.3 实验方法
1)选择符合要求的受测试者15人。
2)对他们的右上臂进行消毒处理,用75%的酒精反复擦拭人体上臂,以去除人体肌肉表面油污、坏死的角质层等。
3)将电极贴在桡侧腕屈肌和指深屈肌的表皮上,用专用腕套将电极固定。
4)每个人在接受测试时,都要求坐在椅子上,将前臂自然放在桌子上,整个身体成放松态。
5)每个受测试者在准备好以后做3个实验,实验1的内容是先放松30 s,然后握拳30 s,最后伸展30 s结束整个过程;实验2的内容是打乱3个动作的顺序,而每个动作的持续时间不变,都是30 s;实验3的内容是在动作打乱顺序的前提下,每个动作的持续时间不同,由测试者自己决定。最终得到90(3×15×2)组数据,由于采样频率设置为1 000 Hz,因此共得到8 100 000(1 000×90 ×90)个数据。
3 对实时数据的分析与处理
为了能够对数据进行实时处理,本部分的工作重点在于确定动作改变的位置。随机选择一个测试者在3个实验中的数据,为了便于分析,这里仅分析该受测试者两路通道中的一路信号作为研究对象,其它数据作为后面检测使用。原始数据见图3,由图3可见动作有变化的痕迹,而且由于实验1和实验2中3个动作的持续时间都相等,因此便可以辨别出动作的分类点。
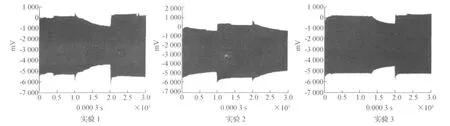
图3 3个实验的原始数据Fig.3 Raw data of three experiments
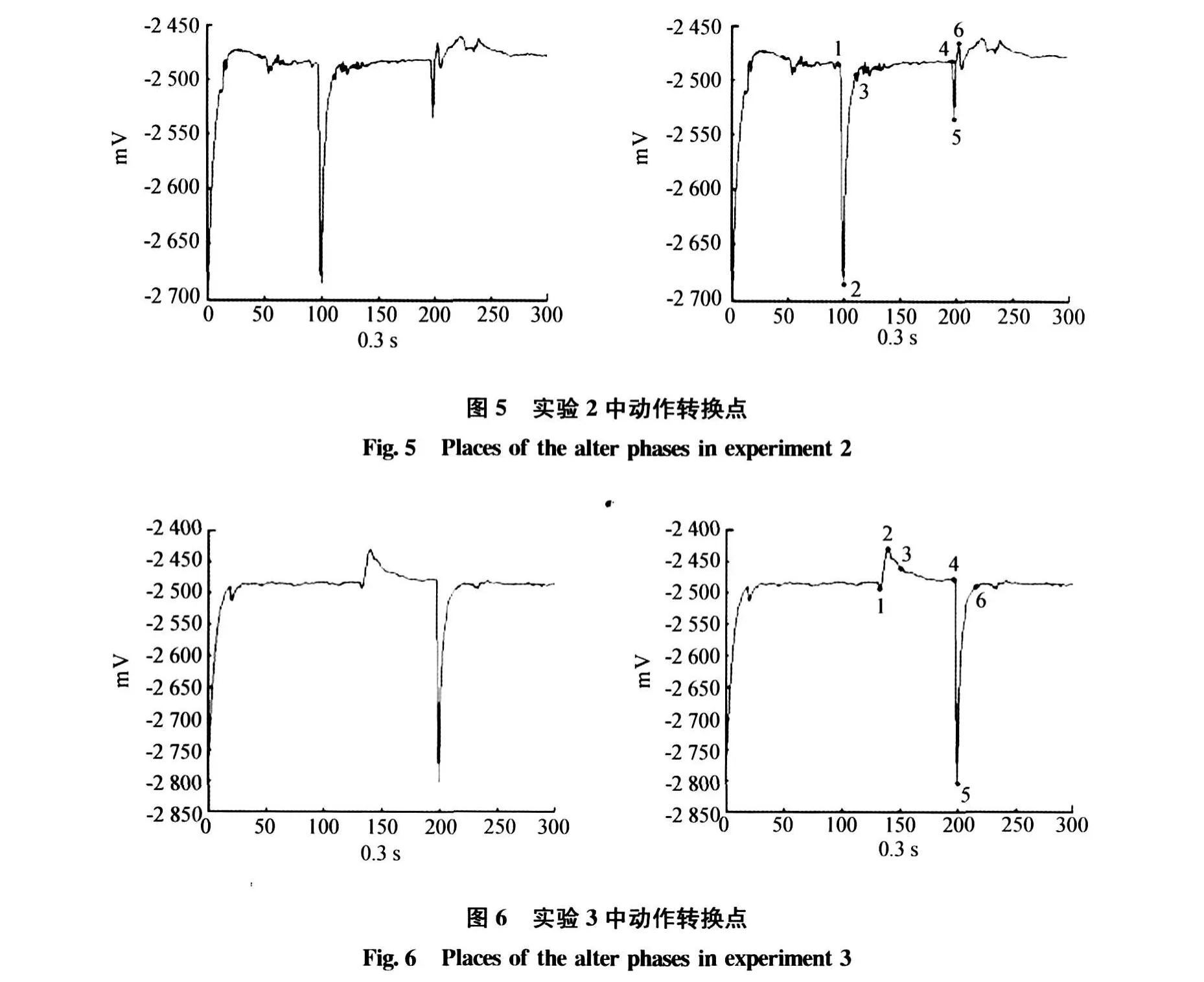
利用计算机采用极值的方法提取出动作变化点附近的位置,原始数据构成的数组a,由于采集的数据量大,同时为了滤除部分加性干扰,首先要对数组a中每100个数据求其平均值作为该点的新元素,重新组成数组a1,然后在数组a1中找到所有的极大值和极小值点组成数组a2,在这些极值点中包含了由于动作转换引起的极值和噪声引起的极值,为了剔除噪声的干扰,我们认为在一个极值与下一个极值的差在45的点是动作转换的点,选出这些点就能够得到动作改变附近的位置,即动作的转换点,当然,根据不同的人这些阀值是不同的,最后返回这些点在a1中的位置。实验1,实验2和实验3的数据结构分别见图4,图5和图6,其中1~6点就是动作的转换点。
经过简单改变阀值该方法可以使用于不同的受测试者或者同一受测试者的不同采样通道。
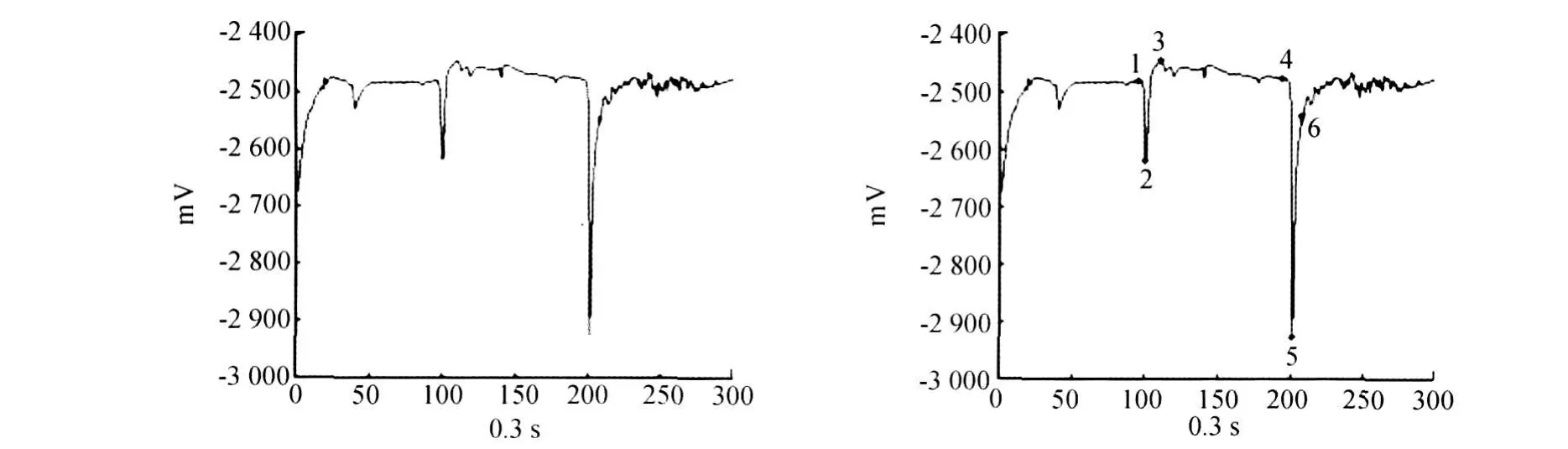
图4 实验1中动作转换点Fig.4 Places of the alter phases in experiment 1
4 结 语
利用肌电信号实现自动控制,一个精确的表面肌电信号采集系统是必不可少的,同时,为了满足实时性的要求,需要对肌电信号中所包含的各个动作信息进行分割处理,然后对分割后的各个动作进行分类识别,从而达到连续控制的目的。其中,将不同动作信息准确的分开是问题的第一步,也是非常重要的一步,如果分割不准确将会直接影响到下一步动作的分类识别。利用极值的方法简单易行,识别率较高,为后面的各个动作的分类识别乃至连续控制奠定了比较好的基础。
[1]丁海曙,容观澳,王广志.人体运动信息检测与处理[M].北京:宇航出版社,1992:94-183.
[2]R.Merletti et al.Advances in Processing of Surface M yoelectric Signals[M].Medical&Biological Engineering&Computing,1995:362-372.
[3]K.Engle hart.B.Hudgins,Parker,M.Stevenson. Classification of the Myoelectric Signal Using Time Frequency Based Representations[J].Medical Engineering and Physics,1999,21(6-7):431-437.
[4]Momen,K.Krishnan,S.Chau,T.Real-Time Classification of Forearm Electromyographic Signals Corresponding to User-Selected Intentional Movements for Multifunction Prosthesis Control[J].IEEE Transactions on Neural Systems and Rehabilitation Engineering,2007,(4):1 534-4 320.
[5]朱 昊,辛长宇,吉小军,等.表面肌电信号前端处理电路与采集系统设计[J].测控技术,2008,(3): 37-39.
[6]秦树人,汤宝平.面向21世纪的绿色仪器系统[J].中国机械工程,2002,11(3):275-278.
[7]李伯成.嵌入式系统可靠性设计 [M].北京:电子工业出版社,2006:92-115.
[8]张华斌,刘 汀,崔立刚.肌肉骨骼系统超声解剖图谱[M].北京:科学技术文献出版社,2007:46-50.
猜你喜欢
成都信息工程大学学报(2021年4期)2021-11-22
科技传播(2019年24期)2019-06-15
中国工作犬业(2019年2期)2019-03-06
北京航空航天大学学报(2017年9期)2017-12-18
发明与创新·中学生(2017年12期)2017-12-11
校园英语·下旬(2016年5期)2016-06-07
西部广播电视(2015年5期)2016-01-16
环球时报(2014-10-08)2014-10-08
汽车电器(2014年8期)2014-02-28
电波科学学报(2011年4期)2011-05-29