
多光束智能耦合技术研究
2011-03-16 07:42张文博郑建平
长春理工大学学报(自然科学版) 2011年2期
张文博,郑建平
(长春理工大学 光电工程学院,长春 130022)
在一复杂光路系统中,需将多台激光器发出的光束快速、高效耦合成一束同轴传输光束,并且能够实时监测合成光束中各子光束之间相对位置的变化情况,对光轴、光瞳的变化进行闭环反馈控制,确保系统工作过程中,各光束光轴、光瞳的变化在要求的范围内。
本文的研究,就是通过对多光束光轴耦合对准技术、光束光轴和光瞳实时在线检测技术、光束光轴和光瞳位置控制技术的实验研究,探索能够实现多光束光轴自动准直并具有自动调整和修复能力的智能化多光束耦合技术途径的可行性。
1 控制系统设计
1.1 系统结构
由光束状态检测器和控制动作实施机构组成。控制系统结构原理如图1所示。每束光分别有一台CCD用于监测光束发散角、光轴和光瞳位置,并根据测量结果去控制相应的调焦机构和电动镜架。CCD输出信号接口为千兆网线,各CCD输出接口经交换机连接到一根网线,传输到工控机。

图1 耦合控制系统结构原理示意图Fig.1 Principle schematic diagrams for coupling control system structure
1.2 数据采集、显示、处理与控制
用一台工控机来完成数据采集、处理和反馈控制的工作。各 CCD数据分别传输到工控机进行实时处理,处理结果对各电动镜架进行控制。系统中有5个CCD、6个电动镜架、3个调焦平移台,还有5个电动滤光片盘。
1.3 软件设计
本文中所需软件包含图像数据采集、数据组织和存储、数据的处理、残差计算、反馈控制、光瞳和光轴控制的解耦、意外事件的处理、信息的显示传输和记录等。软件的总体开发策略考虑如下:
a.软件运行环境为windowsXP。采用VC++6.0作为基本开发工具。部份数据处理算法如有必要,可用matlab来实现。b.软件的总体设计方面,要明确软件的功能、模块划分,形成文档。c.以C++的类为程序基本模块,除了输入和输出接口外,类中的成员尽可能设置为private属性。对类中数据的访问和修改,利用 setXX(var)、getXX(var)等函数进行,而不是直接访问类中成员变量(避免如 C.XX=10);在 setXX(var)等接口函数中,应进行接口参数的取值范围、指针是否溢出等防错检查。d.各函数名、变量名可以由2 3个单词组成,应尽量表示出该过程或变量的物理名称或意义;此外,应按照匈牙利命名法,表示出变量的类型。
2 关键部件机械结构设计
多光束耦合调光系统的机械设计非常关键。系统中包括高精度电动反射镜、数控调焦装置、数控滤光片切换转盘、各类镜架、扩束器等等。
在多光束耦合系统中,为了调节三路光束光瞳、光轴,专门设计研制了计算机控制高精度电动反射镜,如图2所示。该电动反射镜使用直流电机驱动,有两个自由度(绕水平轴和垂直轴旋转),可提供约3°的动态范围,并有限位保护。电动镜架的直流电机选用A-max16(110045)伺服电机,减速器选用GS16V(235076),编码器选用MR-M(201940),控制器选用EPOS24/1(280937),其光轴控制精度达到亚微弧度量级。光路中共有6套电动调整镜,通过CAN总线和控制系统集成控制,电路接口全部实现模块化。

图2 数控电动镜架组装图Fig.2 Numerical control motor-driven mirror bracket assembly diagrams
3 系统实验
3.1 系统安装调试
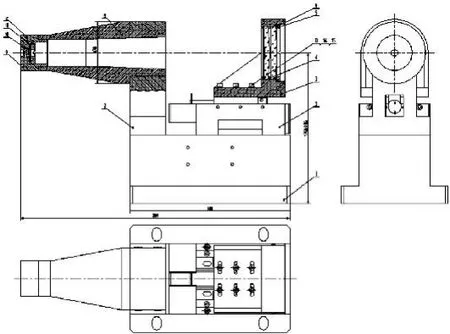
图3 电动调焦扩束器组装图Fig.3 Motor-driven focusing beam expansion device assembly diagrams
首先以632.8nm激光光源的光轴作为全系统的光轴基准,通过一对632.8电动镜架将光轴和近场光斑中心调节至远场探测CCD和近场探测CCD视场中心,并控制632.8调焦电机,使632.8H-SCCD探测的波面离焦残差项为最小(此时在远场探测CCD上的光斑为最小),在远场探测CCD和近场探测 CCD像面上标记光轴和近场光斑中心位置,作为多光束光轴和光瞳位置的调整基准点。同时记录保存632.8 H-S CCD探测的波面离焦残差和光轴位置信息,作为系统闭环校正控制的零点。

图4 二级扩束器组装图Fig.4 Second beam expansion device assembly diagram
完成全系统基准光轴调整后,按照上述步骤,分别调整一对532电动镜架和一对1064电动镜架将532nm和1064nm激光光源的光轴和近场光斑中心调节至在远场探测CCD和近场探测CCD视场中与基准光轴相重合的位置(远场光斑质心偏差量小于1,近场光斑中心偏差量小于0.08mm),并控制532调焦电机和1064调焦电机,使532 H-S CCD和1064 H-S CCD探测的波面离焦残差项为最小,在远场探测CCD和近场探测CCD像面上标记光轴和近场光斑中心位置,作为光轴和光瞳位置的闭环调整零点。同时记录保存632.8 H-S CCD探测的波面离焦残差和光轴位置信息,作为系统闭环校正控制的零点。
3.2 系统关键技术指标检测
主要测试了探测系统的三个关键参数:光轴探测精度、相对光轴误差和光瞳误差。测试光路如图5所示。
3.2.1 光轴探测精度检测
分别用光束质量测量仪和本系统的远场 CCD探测器获得同一光束的远场光斑位置(多次同时采集,取平均值),该光束的光轴改变后,比较二者计算获得的光轴变化量,以光束质量测量仪作基准,获得本探测器的光轴探测误差。

图5 系统关键技术指标检测光路布局示意图Fig.5 Schematic diagrams for optical path layout of detection on system key technical requirements
检测结果如表1所示。取三次测量中,本系统探测器与光束质量测量仪的光轴探测误差的平均值(在口径上)为光轴探测精度。

表1 光轴探测精度检测结果Tab.1 Measuring results for optical axis detection accuracy
3.2.2 光轴相对误差检测
用本系统对532nm和1064nm两束光的光瞳和光轴自动闭环后,用光束质量测量仪探测两束光的光轴偏移(在60mm口径上)。
检测结果如表2所示。三次测量中1064nm和532nm两束激光相对光轴误差的平均值为5.86rad(在60mm口径上)。

表2 光轴相对误差检测结果Tab.2 Detection results for optical relative error
三次测量中两束光的远场光斑图像如图6和图7所示。

图6 光束质量测量仪三次测量的远场图像--532nmFig.6 Far-field image by beam quality measuring instrument for three-times measurement—532nm

图7 光束质量测量仪三次测量的远场图像--1064nmFig.7 Near-field image by beam quality measuring instrument for three-times measurement—1064nm
3.2.3 光瞳误差检测
将光束质量测量系统换成专用的光瞳位置测量仪,用本系统对532nm和1064nm两束光的光瞳和光轴自动闭环后,用光瞳位置测量仪测量两光束间的光瞳误差。检测结果光瞳误差<2mm(光束直径60mm),图8是光瞳探测的近场光斑图像,图9是H-S探测器探测的哈特曼光斑。

图8 532nm(左)和1064nm(右)近场光斑Fig.8 532nm(left)和 1064nm(right)near-field centroid

图9 532nm(左)和1064nm(右)哈特曼光斑Fig.9 532nm(left)和 1064nm(right)far-field centroid
3.3 远距离传输实验
用1km靶目标(带有光斑质心探测功能的测量靶)对三束光光轴一致性进行了验证。打靶过程中,用口径为480mm的发射系统,多光束耦合系统全系统闭环控制各光束的光轴、光瞳位置和光束抖动,实验结果表明,各光束间的光轴偏差 PV值小于1"。光轴一致性数据见表3,光轴抖动数据见表4。

表3 远距离传输光轴重合度测量结果Tab.3 Measuring results for optical axis contact ratio of the remote transmission

表4 光轴抖动数据统计Tab.4 Optical axis intension data statistics

图10 1064nm光轴抖动曲线(左为x方向,右为y方向)Fig.10 1064nm optical axis intension curve(The left refers to x direction while the right refers to y direction)

图11 532nm光轴抖动曲线(左为x方向,右为y方向)Fig.11 532nm optical axis intension curve(The left refers to x direction while the right refers to y direction)
4 结论
通过实验表明,实验系统各项技术指标完全满足总体设计要求。实验过程中,当系统初调到位后,通过总控系统发出指令,可以在2分钟之内,自动完成全系统光路精调,并在激光发射过程中实时控制各光束的光轴指向、光瞳位置、光束准直状态和光束抖动,充分验证了本技术路线的可行性。
[1]Dyton G.Atmospherie-Turbulence Compensation Experiments Using Synthetic Beanon[J].The Lincoln Laboratory Journal,1992,5(1):67-91
[2]刘代中,徐仁芳,范滇元.激光聚交装置光束自动准直系统的研究进展[J].激光与光电子学进展,2004,41(2):1-5.
[3]刘代中,朱健强,徐仁芳,等.4程放大光路自动准直系统研究[J].强激光与粒子束,2004,16(5):582-586.
[4]王志坚,王鹏,刘智颖.光学工程原理[M].北京:国防工业出版社,2010:199-200.
[5]刘俞铭.光学仪器设计生产与装配、检校及光学冷加工新工艺技术、质量检验标准规范实务全书[M].北京:北方工业出版社,2006.
猜你喜欢
中国交通信息化(2022年12期)2022-02-11
成都信息工程大学学报(2021年6期)2021-02-12
摄影之友(2020年12期)2020-12-23
探索科学(学术版)(2019年5期)2019-07-13
中国测试(2018年10期)2018-11-17
光学精密工程(2016年4期)2016-11-07
系统工程与电子技术(2016年7期)2016-08-21
制导与引信(2016年3期)2016-03-20
空间控制技术与应用(2015年1期)2015-06-05
应用光学(2014年3期)2014-06-01
