
地下管线轨迹测量与标绘仪的研制
2011-02-26 09:16贺金俊
上海电力大学学报 2011年3期
贺金俊
(上海市南电力有限公司,上海 200223)
随着城市化建设的高速发展,城市基础设施建设规模日益庞大,工程施工领域日益繁荣,对施工技术和设备的要求也越来越高.水平定向钻HDD(非开挖)施工技术以其特有的先进性、成熟性、适应性,在大中城市(特别是上海、北京、广州)地下管线建设中被广泛应用.
对水平导向钻而言,由于其施工过程的“不可见”,因此在竣工后,如何准确测绘施工轨迹、交付精确的施工资料也是当前应着重解决的问题.受地质条件,以及水平导向钻钻杆挠度的影响,其实际行进轨迹与预定轨迹之间难免会存在偏差.据统计,目前上海市各行业非开挖施工单位的工程竣工图与管道的实际空间位置误差较大(10% ~20%),尤其是在干扰大的城区,误差在20%以上.这会对城市地下管线的规划管理、建设施工,以及地下空间的合理利用产生重大影响.近年来,许多重大地下管线受损事故的发生均是因非开挖管道竣工资料不精确,以及物探结果误差大而造成的.
从2005年起,上海市电力公司与国防科技大学进行科研合作,开展地下管线轨迹测量与标绘仪研制,积极探索水平导向钻非开挖铺管施工轨迹的准确测绘问题,力求为地下管线的科学准确管理提供基础支撑设备.本人参与了此项课题的研发工作,主要负责数据采集及处理系统的研制工作,在对目前常用的测量、定位方法和原理进行分析的基础上,提出了采用3轴光纤陀螺、3轴加速计等元件组成地下惯性测量单元的设想,辅以磁强计、倾斜计、GPS等设备进行实时数据采集,通过数据传输、处理,得到所需轨迹图和相关数据,并根据管道特点,设计了6轮对称行走里程测量方案,解决了测量仪的行走测量误差问题.该地下管线轨迹测量与标绘仪已应用于吴中路-莲花路电力排管和浦东张杨路电力排管工程,并取得了较好的效果.
1 基本原理
目前,地下管线的轨迹探测一般采用地下管线探测仪或水平导向钻定位定向仪.
地下管线探测仪通常采用事后等间距抽样探测的方式[1],根据探测原理分为两类.一是管线探测仪,利用电磁感应原理金属管线、电缆、光缆,以及一些带有金属标志线的非金属管线进行探测.其优点是探测速度快、简单直观、操作方便、精确度高,缺点是探测非金属管线时,必须借助非金属探头,需要侵入管线内部[2],操作不方便.二是管线雷达,即利用电磁波探测所有材质的地下管线,也可用于地下掩埋物体的查找.其优点是能探测所有材质的管线,缺点是对环境要求较高、对操作者素质和经验要求高,以及测深能力较差(难查埋入较深的管线).总体来看,地下管线探测仪容易受杂散电磁场干扰的影响,探测误差大且探测结果不完整.
当前,国内外普遍采用的是水平导向钻定位定向仪,按照其工作原理主要分为两类.一是光电测斜仪,即采用光源经纬仪摄像原理,通过光-电转换实现对水平钻井方位角和倾斜角的测量.由于光电设备对环境的要求非常苛刻,并且测量精度低,因此不能满足非开挖恶劣环境施工的使用条件.二是电磁测斜仪,即通过地磁场测量的方法来给出方位角和倾斜角.由于其测量结果易受附近铁磁物质干扰,因此不能精确测量水平钻井的姿态和位置[3].
地下管线轨迹测量与标绘仪是在结合上述两种仪器设计原理的基础上开发研制的,主要由地下惯性测量单元、里程测量机构、地面处理显示系统3大部分构成.地下惯性测量单元为该系统的核心部分,由3轴光纤陀螺、3轴加速度计、磁强计、倾斜计等组成.其特点是不受天气限制、不需要其他地面设施、不发射和接收任何信号,因而机动灵活,不怕干扰,作业隐蔽,能够适时、迅速、准确地提供测量数据.
地下定向钻进中,对其进行实时的姿态测量是保证地下钻具按照设定钻孔轨迹运动的基础[4].载体的姿态测量常用3组角度——航向角、俯仰角和横滚角——表示.在管线测量过程中,本系统通过实时测量惯性测量单元的3个姿态角(航向角、俯仰角、横滚角)和3个线速度,辅以GPS(测量施工出入口及较浅层轨迹信息)、电子罗盘(测量无磁条件下的航向角)、倾斜仪(测量俯仰角和横滚角)和里程计测量的拖进长度,通过CAN总线传输到地面,进行数据融合,从而确定管线的空间位置.地下管线轨迹测量与标绘仪的工作原理如图1所示.
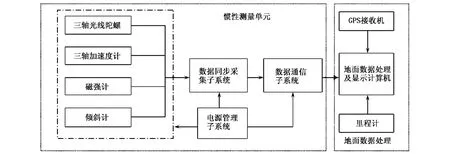
图1 地下管线轨迹测量与标绘仪流程示意
2 关键技术
2.1 机械结构设计技术
地下管线轨迹测量与标绘仪的机械结构设计主要包括惯性测量单元和里程测量机构.
2.1.1 惯性测量单元的设计
惯性测量单元包含3轴光纤陀螺和姿态参考系统(含3轴加表、3轴罗盘),是整个测绘系统的核心部件,包括电池舱段、陀螺安装支架、外壳和密封抱箍等.
惯性测量单元设计中,陀螺安装支架和段间连接方式的设计是核心.陀螺仪定位架采用整体结构,通过3个局部的圆周环,将其与外壳相对固定,并通过圆周来保证同轴度和安装精度.而对于陀螺仪段与电池段之间的连接,则有一定的强度和安装要求,最重要的是连接和拆卸要方便,不能带来旋转运动,且便于作防水处理.
2.1.2 里程测量结构的设计
为提高测绘系统的解算精度,采用合适的里程计对测绘系统实际行走的线距离进行准确测量是必需的.根据管道系统的特点,设计了120°对称6滑轮行走里程测量结构,并采用弹性张力结构,可根据管壁大小自适应调节横截面大小,保证滑轮紧贴管壁,当测绘系统在管道内壁拖动时,滑轮通过齿轮带动光电码盘进行计数,以测量实际行走距离.
由于实际施工敷设的管线内通常存有污泥、细砂等杂物,6轮里程测量机构在管内行走容易受阻或打滑,为此,项目还设计了外接式里程测量机构.
2.2 数据采集软件设计及数据处理解算技术
2.2.1 软件设计
数据采集软件是系统软件设计的核心,用于实现信息的处理、存储、显示,以及系统自检等功能,并配合硬件实现非开挖管线轨迹测量及标绘系统的所有功能.
数据采集软件按照结构化、模块化、通用化的设计原则进行设计,自顶向下、逐步细化,直到用程序设计语言能够实现开发环境为止,从而确立程序的体系结构,见图2.
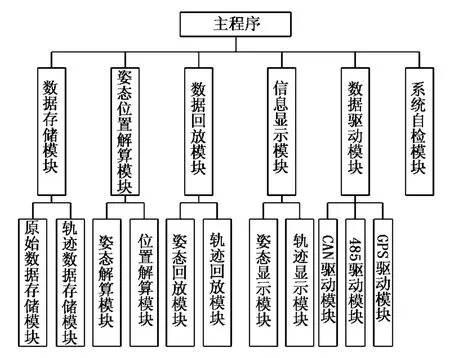
图2 数据采集软件结构
2.2.2 数据处理解算软件
地面处理显示系统将里程计、GPS接收机和惯性测量单元中的数据进行融合,算法流程如图3所示.
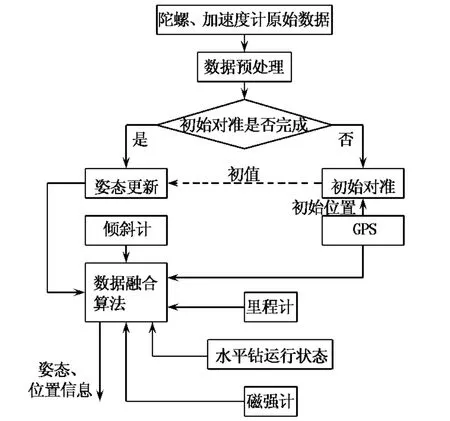
图3 数据处理解算软件算法流程
轨迹解算过程如下:首先,输入陀螺、加速度计的原始信息,通过数据预处理进行零偏、非正交误差、温度误差补偿,得到惯性测量单元的角速度和加速度的测量值.然后,在静态下利用角速度和加速度测量值、GPS测量的初始位置进行初始对准,得到载体的初始姿态.在初始对准完成后,可以开始进行动态姿态测量.最后,利用惯性测量单元的姿态测量值及里程计、磁强计、倾斜计、GPS接收机等的测量值,采用扩展卡尔曼滤波算法进行数据融合,得到惯性测量单元的姿态、位置信息,即可完成对非开挖管线轨迹的解算.
2.3 数据误差分析及补偿技术
地下管线轨迹测量与标绘仪的数据误差主要来源于倾角传感器的精度误差,加速度计的精度误差,加速度计的温度漂移,光纤陀螺的精度误差,光纤陀螺的温度漂移,里程计的精度误差,各传感器的安装定位误差等.由于这些误差的综合作用,致使在测量仪输出中引入了静态偏差和动态偏差项.
针对不同的偏差,可采用不同的技术进行补偿,如各传感器的安装定位误差,属于静态偏差项,可通过精确测量其误差值进行在线补偿.加速度计和光纤陀螺的温度漂移,属于动态偏差项,应先通过热噪音实验获得温漂数据,再通过算法进行全量程温度补偿.此外,针对各传感器本身的精度误差,可通过数据融合技术,利用数据冗余,来提高测量仪的测量精度.而采用适当增益的6态Kalman滤波器可估计出角度误差和角速率偏差,以修正陀螺输出产生的角度漂移,从而得到最优性能.
3 实验情况
为了检验地下管线轨迹测量与标绘仪的测绘精度,以提高系统在实际施工过程中的适用性,先后在浦东新区张杨路电力排管工程、花木路用户配套工程及吴中路-莲花路电力排管工程等管线施工项目中测量了14根实际非开挖敷设管线的轨迹,测量及标绘距离超过1.5 km.图4给出了上海吴中路-莲花路路口的一非开挖敷设管线的轨迹测量图.
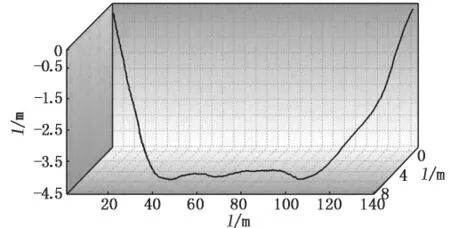
图4 吴中路-莲花路管线三维轨迹示意
4 结语
对城市市政管线进行科学的规范化管理,是确保市政建设施工安全的前提.实际工程试验表明,地下管线轨迹测量与标绘仪具有较高的测绘精度及可靠性,已基本满足了工程施工的需要.通过地下管线轨迹测量与标绘仪的研制工作,可在地下管线施工后得出轨迹测量与标绘资料,这些竣工资料及图纸解决了长期以来非开挖工程施工结束后缺少完整、精确管线轨迹走向资料的问题,为非开挖施工管线的精确测绘提供了有力的工具,值得在管线施工工程领域推广.
[1]吴尚科.地下管线探测技术初探[J].人民长江,2007(10):94.
[2]朱鲁,程久龙,李笃远,等.电磁感应法探测地下金属管线的研究[J].山东科技大学学报:自然科学版,1999(1):8.
[3]周鹏,许志华.惯性测量系统的研究现状及发展趋势[J].读写算,2010(7):21.
[4]徐涛,罗武胜,吕海宝,等.地下定向钻进姿态测量系统的设计[J].中国惯性技术学报,2004,12(2):6.
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
电子元器件与信息技术(2021年9期)2022-01-17
电子元器件与信息技术(2021年11期)2021-03-26
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
快乐语文(2018年36期)2018-03-12
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
船海工程(2017年2期)2017-05-16
