
控制式差动无级变速器调节函数的研究
2011-02-20 00:47李志愿
陕西科技大学学报 2011年4期
李志愿, 张 淳
(陕西科技大学机电工程学院, 陕西 西安 710021)
0 引 言
由于机械无级变速器主要依靠摩擦传递运动和动力,因此其传动功率和变速范围受到了一定的限制.如果用基本型机械无级变速器对差动轮系进行封闭,构成一种组合式无级变速器,则可以扩大传动功率和变速范围以及设计过零调速型无级变速器.长期以来,国内外许多学者对此进行了大量的研究工作,并取得了许多有价值的理论成果.但是目前国内外控制式差动无级变速器的调速主要是靠人工操作调速手柄来实现的,由于人为的不确定因素的存在,调速的精确性、快速性就难以实现,因此控制式差动无级变速器调节函数的建立可为实现该调速装置的自动化调速奠定理论基础.
1 差动无级变速器的工作原理
从基本型无级变速器与差动轮系的组合顺序上,控制式差动无级变速器可以分为PX型和XP型两大类(如图1),这样可以达到如下两个目的之一:提高无级变速装置传递功率的能力;扩大无级变速器的调速范围.
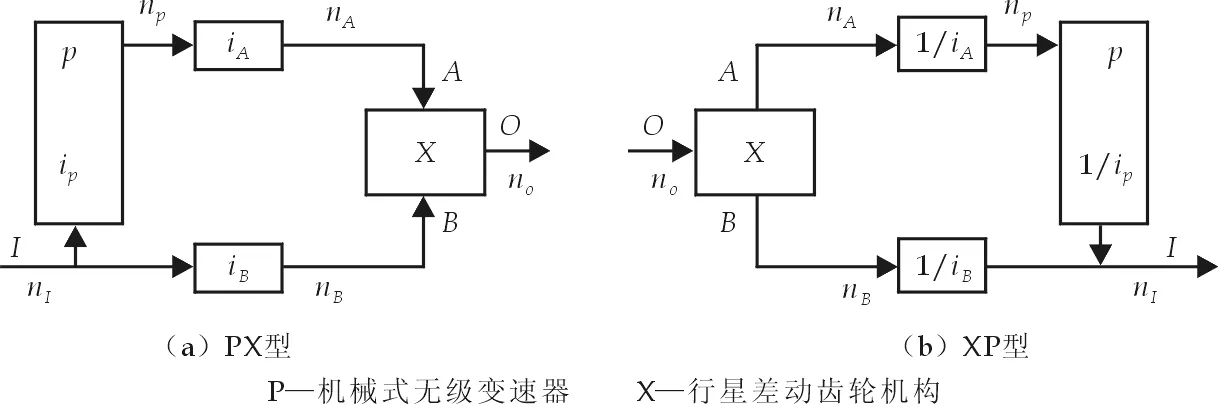
图1 控制式差动无级调速装置传动原理图
由图1可以看出输入的功率从输入轴输入后分为两个支流进行传动,一支通过差动轮系流过以便提高基本型无级变速器的承载能力,另一支通过基本型无级变速器流过以便调速.
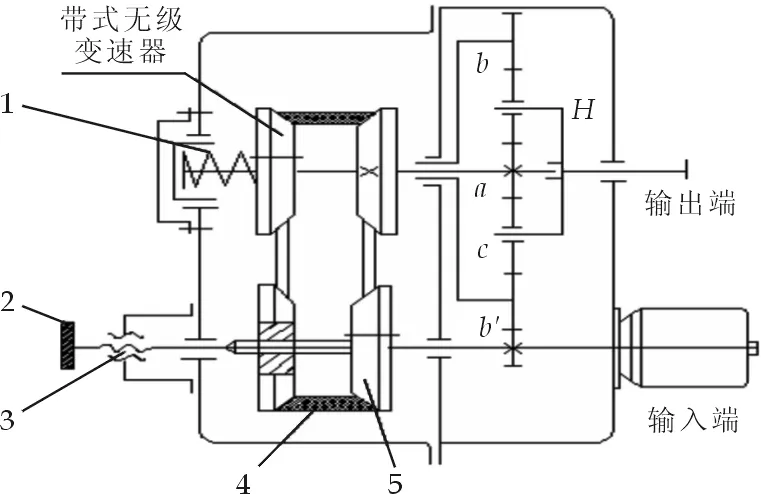
图2 PX型控制式差动无级变速器结构简图
图2是一种典型的PX型差动无级变速器的结构简图,由于差动轮系的输出转速和差动轮系各个参数之间的关系已明确,因此调速主要靠机械无级变速器来调节.通过调速手柄2的转动驱动进给丝杠轴向运动,进而带动可动锥盘轴向移动来改变带轮的工作半径.又因为传动带的长度一定,以此来改变主动轮和传动轮的工作半径,致使无级变速器传动比发生变化,起到调速的作用.
2 控制式差动无级变速器的调节关系
2.1 进给丝杠轴向位移与调速手柄转角的函数关系
设定调速手柄的转角为β,进给丝杠的导程为s,轴向位移为l,则有:
(1)
带式无级变速器调速时,带在可动锥盘轴向移动的作用下改变了带在带轮上的工作半径,图3中(a)、(b)分别代表了双可动锥盘和单可动锥盘时带的位置,带轮的最小直径受到两片锥盘相碰和带落槽的限制.设φ为槽宽,Dmin和Dmax分别为带轮的最小和最大工作半径,bp和b1分别为带的节线宽度和底宽,h1和h2分别为带的中性层至带的顶面和底面的高度,则双可动锥盘2个锥盘的极限轴向移动量为
(2)
对单可动锥盘则其轴向极限移动量为2x=b1,轴向极限移动量也就是函数f4的值域长度.函数关系可以表述为:
(3)
2.2 主动轮工作半径与进给丝杠轴向位移的函数关系
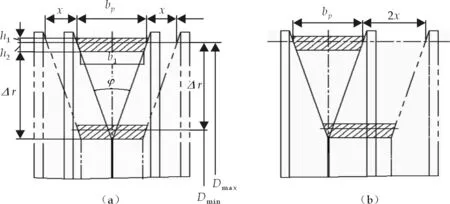
图3 变速前后锥盘和宽V带的位置关系
(4)
2.3 无级变速传动比与轴向移动量的关系
由于我们采用的宽V带为金属带,金属带在变速调节的过程中长度不变(假设伸长率为0),带的长度为:
(5)
宽V带在选用时带长已知,机械式无级变速器在设计时两轮的中心距a已确定,假定主动轮直径d1已知,则:
(6)
则传动比为:
(7)
2.4 行星轮系传动关系
如图2所示,分别以nA、nB和nH表示差动轮系的中心轮a、内齿圈b和系杆H的转速(即行星轮转速nC),由参考文献[1]可知差动轮系各基本构件的关系为:
(4)
(8)
(9)
再由行星轮系传动比之间的关系得:
(10)
(11)
将式(5)、(6)、(7)、(8)代入式(4),可得输出转速的函数关系式:
(12)
2.5 控制式差动无级变速器数学模型的建立
由f1、f2、f3、f4函数之间的层层嵌套就构建了输出转速nH与调速手柄转角β之间的复合函数关系式:
(13)
3 调速控制系统的设计
控制硬件系统是差动无级变速器调速系统的基础,是实现调速控制的硬件平台,系统的硬件原理如图4所示.
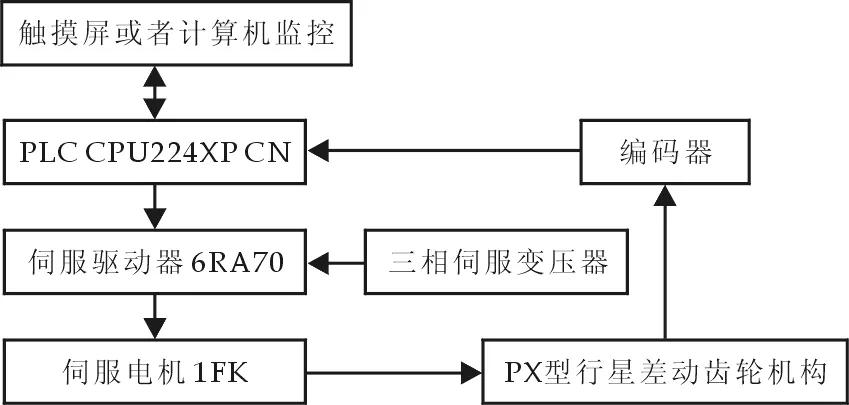
图4 控制系统硬件原理
该控制系统需要测定的关键参数是差动无级变速器输出轴的转速,这里采用旋转编码器来测量装置的输出转速.编码器是用于速度控制或位置控制系统的检测元件,然后把检测到的脉冲信号送给PLC,PLC再根据设定值与编码器输送的值进行差值运算.该控制系统选用西门子自动化驱动集团的CPU 224XP CN型PLC,此类型PLC有子整定PID控制器,完成测试数据的采集、运算和运动控制,既发挥了PLC程序控制功能强大的优点,又有效的节省了控制系统的成本.在这里采用西门子6RA70系列伺服驱动器来控制伺服电机,伺服驱动器是用来控制伺服电机的一种控制器,其类似于变频器作用于普通交流马达,属于伺服系统的一部分.目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,实现数字化、网络化和智能化.伺服驱动器一般可以采用速度、位置和力矩3种控制方式,主要应用于高精度定位系统,目前是传动技术的高端.在此系统中采用位置控制方式,并选用位置控制模块EM253.伺服电机的转子转速受输入信号控制,把所收到的电信号转换成电动机轴上的角位移或角速度输出,并能快速反应,且机电时间常数小、线性度高、始动电压稳定,其主要特点是当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降,可使控制速度、位置精度非常准确.
式(13)就是为图4控制系统建立起来的调节函数,找出了控制式差动无级变速器输出转速与调速手柄转角的函数表达式,为控制系统精确调速提供了理论基础.
4 结束语
本文通过分析差动无级变速器的结构特点,基于一种常规的PX型控制式差动无级变速装置的传动机理,推导出整个装置各个衔接点的函数关系,最后找出了调速手柄的转角与输出转速之间的函数对应关系并建立起整个装置的数学模型,为自动调速控制系统的建立提供了理论依据.
参考文献
[1] 饶振刚.行星齿轮传动设计[M].北京:化学工业出版社,2003.
[2] 阮忠唐.机械无级变速器设计与选用指南[M].北京:化学工业出版社,1999.
[3] 张 淳,周令华.控制式差动无级调速装置的传动特性[J].齿轮,1990,(1):46-51.
[4] 张 淳,王乃信.控制式差动无级变速装置的分析与综合[J].西北轻工业学院学报,2000,18(6):34-37.
[5] 吴春英,陈奕红.差动式无级变速减速器的分析研究[J].机械科学与技术,2002,21(6):915-917.
[6] 西门子(中国)有限公司工业业务领域工业自动化与驱动技术集团. S7-200可编程控制器系统手册[Z].北京,2007.
猜你喜欢
装备制造技术(2020年11期)2021-01-26
装备机械(2020年3期)2020-09-29
机械管理开发(2020年1期)2020-03-14
电子制作(2018年11期)2018-08-04
电子制作(2017年10期)2017-04-18
电子制作(2017年23期)2017-02-02
科普童话·百科探秘(2015年5期)2015-05-26
小朋友·快乐手工(2015年3期)2015-04-10
电测与仪表(2015年24期)2015-04-09
电力工程技术(2014年5期)2014-03-20
