
基于PIC单片机的汽车车身集中控制系统的硬件设计
2011-02-08 09:06:30廖建庆梁国祥
常熟理工学院学报 2011年4期
廖建庆,梁国祥
(宁德师范学院 物理与电气工程系,福建 宁德 352100)
随着科学技术的发展,汽车上广泛使用了汽车电器,汽车电器功能也在不断的增加和完善,因此对汽车电器的控制要求也越来越高,以往的分散控制正在逐渐被淘汰,为了节省汽车上的空间和成本,同时便于更换和维修,要求将这些控制部件集中在一个模块上进行控制[1-3].本文控制系统以PIC16F74单片机[4]为控制模块,通过PIC16F74单片机,将一些分散的控制功能进行集中整合和扩展,使所有功能在一块单片机上进行控制.系统加入了闪光器,蜂鸣报警器,碰撞自动开锁和遥控钥匙学习等功能,其中中控门锁控制和各种功能的报警是系统的核心.
1 系统组成
系统主要由遥控信号检测电路、外部信号检测及电平转换电路、放大电路、驱动电路、震动检测电路等组成.将这些功能进行集中整合,从而实现对汽车的集中控制.根据设计的功能要求,很多型号的单片机都可以使用,但出于经济、生产、编程等多方面因素的考虑,本系统最终选择了PIC16F74型单片机,而且PIC单片机本身也是一款广泛应用于汽车电器控制的单片机[5].
PIC系列微控制器是单片机中的优秀产品.它率先采用精简指令集计算机RISC、哈佛双总线和两极指令流水线结构的高性能价格比的8位嵌入式控制器.其高速度(每条指令最快可达160ns)、低工作电压(最低工作电压为3V)、低功耗(3V,22kHz时15mW)、较大的输入输出直接驱动LED能力(灌电流可达25mA)、一次性编程OTP芯片的价位低且体积小、指令简单易学用等,都体现了单片机控制领域发展的新趋势,系统组成框图如图1所示.
系统以PIC单片机为核心的工作模块.系统先由外部传感器接收需要采集的各种状态的数据,然后通过各种接收电路进行采样,通过电平转换电路进行电压转换,最后进入单片机进行数据处理,处理完的数据经过放大器进行放大,再通过各种驱动电路输出到汽车的各个电器上,从而实现了系统对整车的控制.
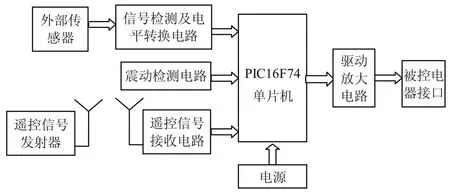
图1 系统组成框图
2 系统硬件设计
2.1 遥控接收接口电路
系统很多功能的执行取决于主机是否处于警戒状态,也就是说取决于遥控钥匙上的LOCK键或UNLOCK键是否按下,此模块就为遥控钥匙发射出信号的接收电路.信号从发射器中发出,经此电路接收后再进入单片机.遥控接收接口电路如图2所示.
遥控接收电路的供电取自电源电路,电路中CP2起滤波作用,引脚RF接单片机的14脚,此模块将从遥控钥匙上接收的信号送入单片机进行处理.电路中的芯片为了使钥匙不易被破译,保密性好,而且容易重新学习加密,还为电路提供遥控钥匙的滚动解码加密技术.
2.2 信号检测及电平转换电路
该电路是将外部采集到的脉冲信号转换送入单片机,由于外部电器是12V的工作电压,而单片机是5V的工作电压,所以需要进行处理转换.系统中单片机对输入信号采用高电平有效的读取方式,但外部电器及传感器有的高电平有效,有的低电平有效,故设计中主要有高电平有效电路和低电平有效两种,电路如图3所示.

图2 遥控接收接口电路

图3 高、低电平有效电路
图中三极管、R53、R54、R52构成反向器,完成低电平向高电平的转换,C51起滤波作用.R51、D51起信号输入控制作用,当输入为低电平时,D51导通,三极管饱和,输出为5V的高电平信号.当输入为悬空或低电平时,三极管截止,输出为0电位.电阻R42与电容C41起滤波作用,由于芯片的工做电压是5V,所以5V的稳压管使电压稳定在5V.电路中R41和R42起降压作用,若稳压管失效,它可使芯片不会被烧坏,起保护芯片作用.
2.3 驱动放大电路
2.3.1 驱动电路
汽车车身控制驱动电路主要包括顶灯驱动电路、蜂鸣驱动电路、转向灯驱动电路和门锁开关驱动电路等,这些驱动电路都需要PIC单片机进行实时控制.
1、顶灯驱动电路
汽车的车灯是有一定功率的电器,单片机无法直接对它进行控制,所以要通过驱动放大电路将电压和功率放大转换成与其相匹配的工作电压和功率,从而驱动车灯,驱动电路如图4所示.
图中三极管起放大作用,电阻的作用是限流,起保护电路的作用.此电路当顶灯开关打开便有脉冲信号输入高电平有效,经过处理后进入单片机进行运算控制.与此类似的电路还有:报警喇叭驱动电路.
2、转向灯驱动电路
信号从单片机出来经驱动放大电路就转换成了与其相匹配的电压,从而驱动转向灯的开关,方向灯驱动电路如图5所示.

图4 顶灯驱动电路
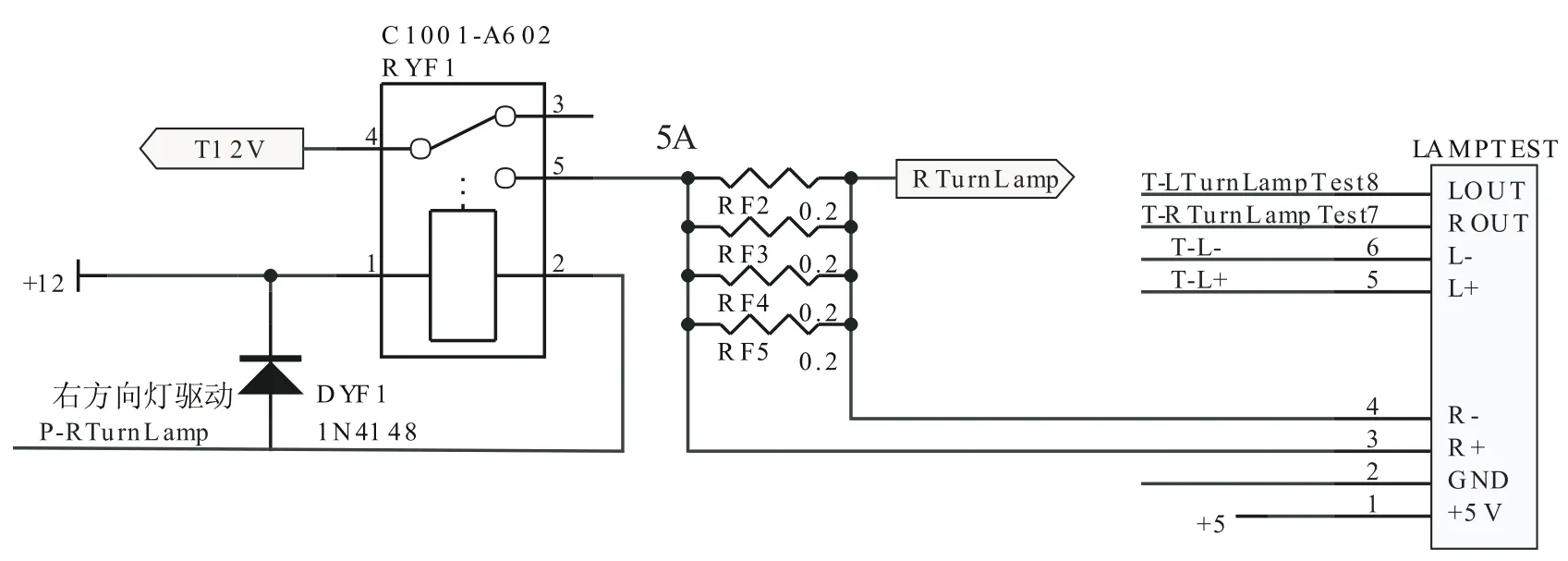
图5 方向灯驱动电路
电路中二极管的作用是防止反向电流的冲击,继电器起开关作用,4个并联的电阻RF2、RF3、RF4、RF5相当于一套保险丝,大电流会熔断,起保护电路的作用.电路右边是一块检测芯片,检测方向灯是否打开.图中所示的是右方向的驱动电路,左方向灯驱动电路与此电路完全相同,而保险出来接芯片的5、6脚(图中已标明).
2.3.2 放大电路
信号从单片机出来后经过此芯片得到放大,然后进入各个驱动.此芯片集成了多个放大器,使整个电路的体积大大减小,也降低了电路的复杂性,使电路的连接趋于简单化,更加体现了整个模块集成控制的特点.此模块放大电路仅由一块芯片构成,其电路如
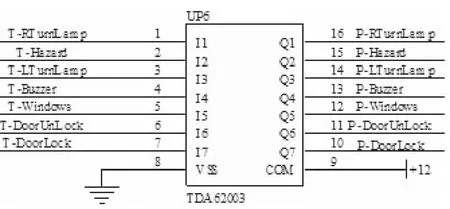
图6 放大器芯片电路
芯片TDA62003是整个系统模块的集中放大电路,芯片内部集中了7个NPN型的三极管组成的放大器.芯片引脚的连接图中已标明,图中每两个相对应的引脚就组成一个放大器,引脚上标明的就是该引脚所放大的电路.此芯片最高可工作于35V的电压,输出电流为500mA,芯片的功耗为1.47W.
2.4 通信接口电路
通信接口电路采用CAN接口方式[6],其中CAN通信控制器采用Philips公司生产的SJA1000,它是独立的CAN总线控制器.SJA1000在原来BasicCAN的工作模式上又增加了一种新的工作模式PeliCAN,这种模式支持具有很多新特性的CAN2.0B协议,可通过分频器中的CAN方式来选择工作模式.SJA1000与单片机直接连接,电路简单;CAN总线驱动器采用CTM1050,其模块是集成电源隔离、电气隔离、CAN收发器、CAN总线保护于一体的隔离CAN收发器模块,该模块TXD、RXD引脚兼容+3.3V、+5V的CAN控制器,无需外接其他元器件,直接将+3.3V或+5V的CAN控制器发送、接收引脚与CTM模块的发送、接收引脚相连接.采用这种方案可很好地实现CAN-bus总线上各节点电气、电源之间完全隔离和独立,提高节点的稳定性和安全性,降低电路的复杂性,节约成本.
3 软件设计
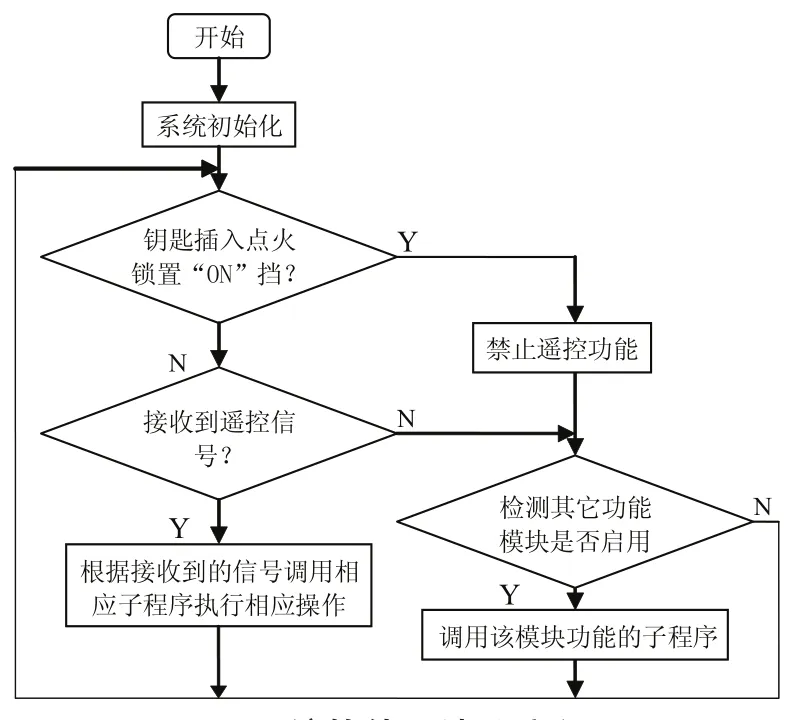
图7 系统软件设计总流程图
根据系统的总体设计要求以及硬件电路原理,按照硬件连接和各个模块芯片的特性以及功能实现要求,本系统的总体设计思路包括五个部分:系统初始化,是否启用中控锁功能,是否有碰撞发生,是否启用顶灯,是否处于蜂鸣器提示状态和是否处于学习状态.系统的软件设计总流程图如图7所示.
首先对硬件初始化,给各个端口赋初值或清零.通过检测钥匙是否插入点火锁和钥匙是否打到“ON”挡判断遥控功能是否禁止,遥控功能没有被禁止并有遥控信号发出,这时PIC芯片通过遥控接收接口电路接收信号,根据接收到的信号调用相应的子程序,执行完后返回.当没有接收到遥控信号时,由于钥匙在“ON”挡,车身所有功能都打开,PIC芯片通过其各个引脚,检测车身正处于哪个状态,当此时所处的状态满足某个子程序的必要条件时,则调用该相应的子程序.其中主要有10KM/H自动上锁程序,二次上锁子程序,防盗报警子程序,碰撞自动开锁子程序,顶灯控制子程序,蜂鸣器报警子程序等组成.
4 结束语
系统以PIC16F74单片机为核心控制系统,用于汽车电器的集中控制.系统主要控制汽车的中控门锁,闪光器,蜂鸣报警器,喇叭和遥控钥匙学习滚动解码器等各种汽车电器,并实现各部分电器相对应的各种功能.系统最大的特点是实现了集中控制,体积小、质量轻,且实现的功能更加完备,有一定的应用前景.
[1]汪淼,周国祥,常安云.基于LIN总线的车身控制系统设计[J].合肥工业大学学报(自然科学版),2009,21(1).
[2]陈道炯,邢欣,吴姣,等.汽车车身装配偏差定性分析方法的研究[J].汽车工程,2009,35(1).
[3]金耀,于德介,宋晓琳.汽车主动悬架的单神经元自适应控制[J].汽车工程,2006(10):46-48.
[4]刘启中.PIC单片机原理及应用[M].北京:北京航空航天大学出版社,2003.
[5]叶利福,詹群峰,李灵杰,等.基于CAN总线的车身控制和监测系统设计[J].传感器世界,2008,32(8):32-34.
[6]苏燕娟,朱双东.基于CAN/LIN总线的汽车车身网络研究[J].宁波大学学报(理工版),2009,22(4):463-466.
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:42
语文世界(小学版)(2019年2期)2019-02-24 08:24:34
测控技术(2018年6期)2018-11-25 09:50:12
测控技术(2018年8期)2018-11-25 07:42:08
中国科技纵横(2015年2期)2015-11-05 02:30:11
电子设计工程(2015年8期)2015-02-27 12:05:26
科学中国人(2014年16期)2014-11-20 02:50:00
小天使·一年级语数英综合(2014年7期)2014-06-26 14:45:18
中国新技术新产品(2014年3期)2014-03-24 07:39:08
河南科技(2014年16期)2014-02-27 14:13:22
