
编组场尾部的判辆技术
2011-02-02 03:59邢科家
铁道通信信号 2011年3期
王 健 邢科家
编组场尾部的判辆技术
王 健*邢科家**
通过编组场尾部判辆技术实现编尾调车作业跟踪,对提高编组站综合自动化整体水平具有重要意义。本文建立了模型,讨论利用传感器判断车列辆数和速度的方法。
编组站综合自动化;编组场;判辆;传感器
车辆跟踪对于铁路运输具有十分重要的意义。编组站是铁路车辆的主要集散地,编组站的车辆跟踪是路网车辆跟踪的关键部位,对现车管理,车流推算,编制和优化解体、编组计划至关重要;对改进编组站的经营管理,压缩中转时间,减员增效,改善劳动条件,降低劳动强度具有重要意义。编组场尾部的判辆跟踪技术,是编组站车辆跟踪技术的重点与难点。
1 编组站车辆跟踪
编组站管理信息系统可实现全站调车作业计划的自动生成,并自动下达到各作业点。但对于大部分编组站,除解体作业能通过驼峰自动控制系统完成实时跟踪、执行结果自动反馈外,其余如到达、编组、出发、交换等作业的执行结果,只能依靠人工校核的方式进行反馈。
在建设了编组站综合自动化系统的站场,自动化系统可根据计划完成报点实现调车计划的逻辑跟踪,但依然不能自动核对调车实绩的辆数。计划跟踪一旦发生错误,如果不及时纠正,错误就会扩散,寻找和纠正非常困难。人工核对车号,人工跟踪车辆的移动,劳动强度大,效率低下,且容易出错。因此需要完善编组站综合自动化系统,实现解编作业和调车作业等现场作业实时信息的自动反馈,做到全站车辆到、编、发连续的车辆实时跟踪。
2 编组场尾部判辆方法
判辆是指自动判断调车实际作业辆数。在完善了现车数据的站场内,只要掌握每一钩调车作业的实绩,就可准确地实现站内车辆跟踪定位。编组场尾部是编组站中调车作业最繁忙的区域之一,作业密度大、情况复杂多变,作业实绩对后续作业影响大,是编组站车辆跟踪的重点和难点。实现高质量的编尾判辆,对作业实时信息的自动反馈,实现全站车辆到、编、发连续的车辆实时跟踪、提高编组站综合自动化整体水平具有重要意义。
编组场尾部作业辆数、方向多变,判辆技术必须能够适应这一特点。对于单方向一次通过的车列,可通过计量车体的特征信息实现判辆,但对于编尾常见的折返作业,还必须加入方向判断机制,才能实现准确的判辆。下文提出一种用传感器组实现判向、判辆的方法。
2.1 用传感器组判断车辆行驶方向
使用2个传感器组成检测单元,通过分析检测信号的先后顺序,来判断车辆的行驶方向和速度。针对车辆的某种特征进行的检测都符合图1中的模型。
下面以无源电磁踏板作为传感器进行讨论。讨论结果对符合上述模型的实例均适用。
利用无源电磁踏板(车轮传感器)判断车辆行驶方向,是利用同一车轮连续经过2个无源电磁踏板时产生的传感信号关联性做出的。当同一车轮分别经过2无源电磁踏板a、b时,若a的传感信号先于b的传感信号,可判断车辆由a向b方向行驶,反之亦然。如果a、b 2无源电磁踏板的间距已知,还可近似计算出车辆的行驶速度:速度≈无源电磁踏板间距/传感信号时间差。
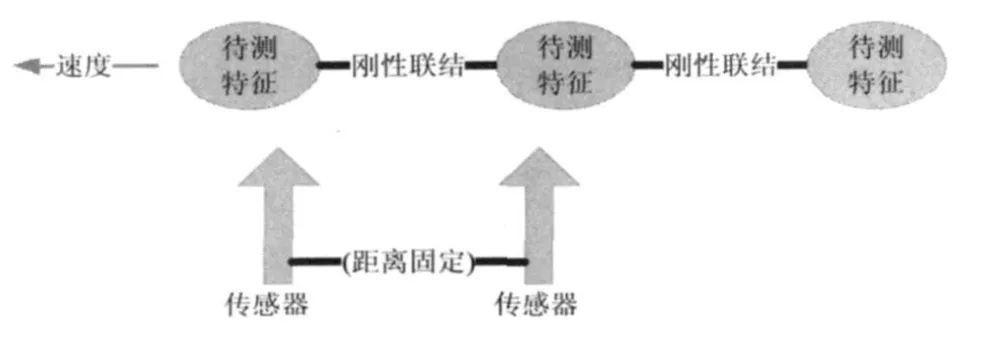
图1 检测模型
实际上,由于无源电磁踏板只能感知车轮而不能辨别不同的车轮,当2个车轮A、B分别经过无源电磁踏板a、b时,可能导致判断错误。如图2所示,L1/L2=5,车辆从I位置启动以速度V行进,首先a采集到A经过,之后b、a先后采集到B经过。在进行信息处理时,若将a、b的第一个信号配对进行计算,则导致错误的速度结果。若在处理中对采集信号进行分析,将a采集的第一个信号剔除,将b采集的第一个信号和a采集的第二个信号配对,可计算得到正确结果。剔除是否准确,决定识别结果是否正确。下面以图2中的情景为例,研究采集信号的剔除。
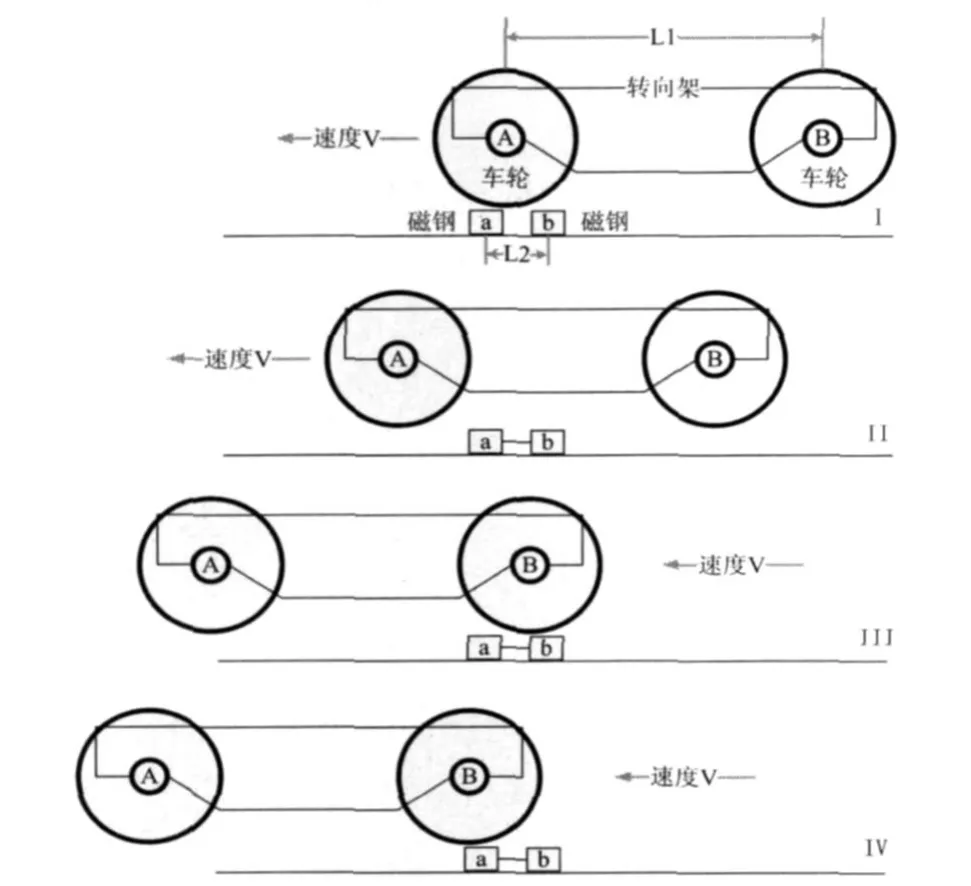
图2 转向架经过传感器组
设A经过a的时刻为t1,B经过b的时刻为t2,B经过a的时刻为t3。判断t1、t2、t3时刻采集信号中的哪一个应予剔除,即判断哪2个信号由同一个车轮产生。
假设1:车辆从I位置启动,车辆启动之初V恒定,L1/L2=5。
假设2:车辆启动之初产生的3个信号中,同一个车轮产生的2个信号相邻(时间差最小)。
依上述假设,被剔除的必是t1时刻和t3时刻2信号中的一个。下面研究|t1-t2|与|t2-t3|,哪一个是同一车轮产生的两信号的时间差△t1,哪一个是不同车轮产生的两信号的时间差△t2。
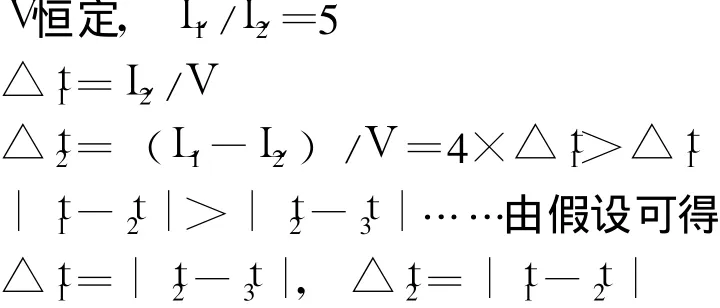
t2和t3时刻产生的信号是同一车轮产生的2个信号
t1时刻产生的信号应被剔除
|V|=L2/|t2-t3|,方向为由b指向a
从上述推导中发现,当L1/L2=2时,△t2= (L1-L2)/V=L2/V=△t1,无法继续计算。如果L2>L1,即a、b中间插入了更多的车轮,如图3,显然会增加推理的复杂程度。

图3 车列经过传感器组
实际中|t1-t2|和|t2-t3|需要通过采集信号计算得到,信号的采集、处理和传输等一系列过程难免使计算结果产生误差,为避免误差造成影响,当然希望|t1-t2|≫|t2-t3|,|t1-t2| -|t2-t3|=△t2-△t1=(L1-2×L2)/V,所以希望L1≫L2旨在提高可靠性。参考假设1,L1/ L2≈5较合理。
车列刚启动时速度低、加速度较小,L1、L2长度较短,可近似认为车轮经过传感器时的速度V恒定。综上,假设1成立。
对于假设2,如果车辆启动之初产生的3个信号中,同一个车轮产生的2个信号不相邻,则必为图4中的情形。时序上A先经过b,B再经过b, A再经过a,此时必须满足L2>L1,与假设1相悖。所以,图4中的情形不会出现。假设2成立。
上述推导中使用了车列启动之初传感器采集的3个信号,在图2描述的情况中,车列启动时车轮A正好处在无源电磁踏板a和b中间,此时最少需要分析3个采集信号才能得到正确结果。如果没有车轮位于a和b中间,情况较简单,同理可判断出3个采集信号中的前2个信号为有效信号。
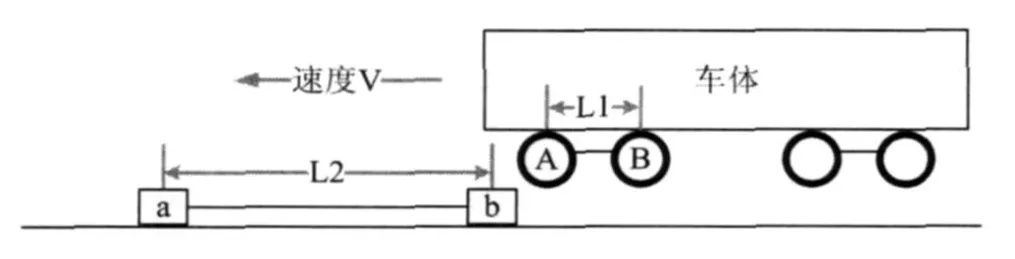
图4 车列经过传感器组
将上述推导推广到任意时刻,选取任意相邻的3个采集信号推算速度,可实现实时速度检测。
假设1:车辆从I位置启动,车辆启动之初V恒定,L1/L2=5。
假设2:车辆启动之初产生的3个信号中,同一个车轮产生的2个信号相邻(时间差最小)。
假设1中的速度假设变为:任意时刻速度V恒定(采集到任意3个相邻信号的时间段内,速度V近似恒定)。若上述假设成立,则假设2易证。
2.2 判断车辆数
上一节中得到结论:|V|=L2/|t2-t3|,方向为由b指向a。已知瞬时行驶速度和车轮经过的时间差,可计算得到各个车轮的间距,得到一张车列轴距表。目前国内使用的各种机车、车辆都有固定的轴数和轴距,通过对比各种车辆的轴距数据,可得到车列的编组信息(车种、数量和顺序),进而判断出经过采集点的车辆数。
用经过采集点的车辆数,结合车辆行驶方向,可得到进出股道的车辆数,即实现调车作业辆数的采集。
3 总结
实现高质量的编尾判辆,对提高编组站综合自动化整体水平具有重要意义。本文建立了一个检测模型,并以车轮和踏板为例讨论了判辆技术的逻辑。
在实际应用中,用踏板检测车轮也许不是最理想的检测方案,寻找更好的检测方案的工作正在进行。实现高质量的编尾判辆的目标即将实现,编组站综合自动化的整体水平也将随之提升。
Tracking shunting operations at the tail of amarshalling yard can be realized through vehicle counting technique and is significant to enhancing the overwhole levelof synthetic automation ofmarshalling yard.Therefore,how to determine number of vehicles and speed of train sets via sensor was discussed.
Synthetic Automation of Marshalling yard;Marshalling Yard;Vehicle Counting;Sensor
中国铁道科学研究院通信信号研究所 100081 北京
*助理研究员 **副研究员
2011-01-21
(责任编辑:张 利)
猜你喜欢
电子制作(2019年12期)2019-07-16
铁道通信信号(2018年9期)2018-11-10
铁道通信信号(2018年7期)2018-08-29
减速顶与调速技术(2018年4期)2018-08-27
铁道通信信号(2018年1期)2018-06-06
铁道通信信号(2018年3期)2018-04-19
北京航空航天大学学报(2017年6期)2017-11-23
铁道通信信号(2016年12期)2016-06-01
铁道通信信号(2016年2期)2016-06-01
互联网天地(2016年2期)2016-05-04
