行波型旋转超声电机两种组合方式的实验研究
2011-02-01 01:39尹育聪姚志远赵淳生
中国机械工程 2011年1期
尹育聪 姚志远 赵淳生
南京航空航天大学,南京,210016
行波型旋转超声电机两种组合方式的实验研究
尹育聪 姚志远 赵淳生
南京航空航天大学,南京,210016
为了进一步提高超声电机的输出性能,设计并实现了两种组合结构的行波型旋转超声电机(TRUSM)——双定子单转子结构和双定转子结构,并依据结构特征,定性分析了定转子接触状态对两种组合方式输出性能的影响。参照单定转子TRUSM,用对比实验检验了两种组合结构TRUSM的特点。实验结果表明,组合结构是大幅度提高TRUSM输出性能的一种有效方法,而且组合结构中的定转子接触状态对输出性能意义重大。
行波型旋转超声电机;组合结构;大转矩;高能量密度
0 引言
行波型旋转超声电机(TRUSM)具有结构紧凑、设计灵活、功率体积比大、低速大转矩、响应快、位移分辨率高、无磁场干扰、低噪声运行、可在极端环境下工作等优点,正逐渐应用于机器人、精密仪器仪表、医疗器械、航空航天等领域[1-3]。目前,为了进一步适应输出转矩大但结构尺寸小的应用要求,设计组合结构的TRUSM是一种较方便的方法。
TRUSM的运行原理是利用定转子间的动态接触摩擦,将定子振动体接触面上的超声频率微米级振幅的周向行波转换为转子的宏观回转运动,因此在组合TRUSM时,定转子间动态接触摩擦对电机的最终输出性能影响很大[4]。目前,国内外学者主要从结构设计的角度提出过几种组合结构的TRUSM[5-8],但均未明确报道电机输出性能的情况。为此,本文根据目前TRUSM的两种主要定转子接触方式——刚性转子接触和柔性转子接触,提出了两种切实可行的TRUSM组合方案——双定子单转子TRUSM和双定转子TRUSM,制作出原理样机并测试了样机的输出性能,并比较了这两种TRUSM组合方案的优缺点。
1 双定子单转子TRUSM
双定子单转子结构是TRUSM最简单的一种组合形式,它采用结构完全相同的两个定子,上下对置夹住中间单个转子,通过与中间转子相连的转轴输出机械能。双定子单转子TRUSM的接触状态如图1所示,由于受到两个定子上下对称的作用力,圆板状中间转子的腹板不存在弯曲变形,而转子与存在周向行波定子之间的接触面并不是平面,在电机运行时,定转子间的实际接触面积下降很大,从而较大地制约了电机的输出性能。此外,双定子单转子TRUSM需要额外的压簧使定转子间保持一定的预压力。
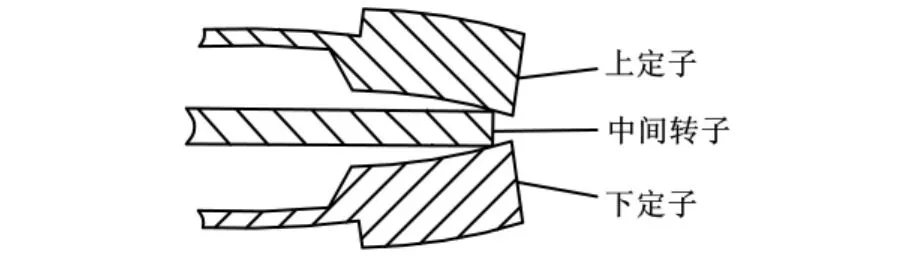
图1 双定子单转子TRUSM的接触示意图
国内外学者曾提出过双定子单转子TRUSM的具体设计方案[6-7],但并未报道电机的实际输出性能。为此,本文设计并实现了如图2所示的双定子单转子TRUSM,采用向心定位块固定碟形弹簧的径向位置,以保证碟形弹簧所产生的预压力能够均匀地施加在定转子之间,同时,在内部定子座上均布有周向定位片,从而消除了上定子在驱动转子时出现周向反转的可能。
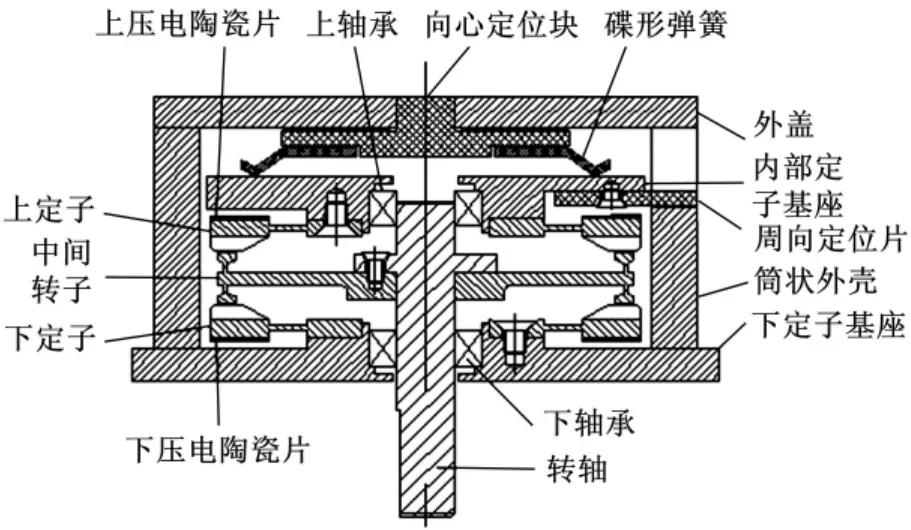
图2 双定子单转子TRUSM
与采用刚性转子的单定转子TRUSM相比,双定子单转子TRUSM完全忽略了转子与定子间的变形匹配,机电转换效果较差。图3是采用刚性转子TRUSM的定转子接触示意图,刚性转子TRUSM通过刚性转子上的压簧变形,使定子、转子之间保持了一定的预压力,但由于刚性转子的腹板存在一定的弯曲变形,电机运行时定子和转子间的动态接触面积有所提高,从而部分改善了电机的输出性能。

图3 刚性转子TRUSM的接触示意图
2 双定转子TRUSM
双定转子结构是TRUSM最直接的一种组合形式,其基本形式是采用相同尺寸结构的两组定转子,一个定子与一个转子构成一组驱动源,另一个定子与另一个转子构成另一组驱动源,两组驱动源通过与两个转子连接的公共转轴输出机械能。一些学者曾提出双定转子TRUSM的设计方案[5,8],这些方案意在充分利用较为成熟的单定转子TRUSM的接触驱动特性,然而实验结果并不理想。
为解决上述组合方案中所存在的问题,本文提出从结构上抑制两个定子在行波驱动转子过程中存在的轴向振动耦合,旨在消除组合结构中的非线性叠加因素,具体设计了一种阶梯轴结构的复合夹持机构,如图4所示。这种复合夹持机构的功能元件可分为如下两部分:①由下定子基座和上定子基座固定于筒状外壳的两端面而构成的外部固定结构,用以固定TRUSM的两个定子;②通过下定子基座内的下止推轴承和上定子基座内的上止推轴承共同限定阶梯轴的轴向位置而形成的内部支撑结构,对安装在转轴上的两个转子施加了轴向约束,从而隔离了两组定转子间的振动能量传递,保证了双定转子TRUSM运转稳定。
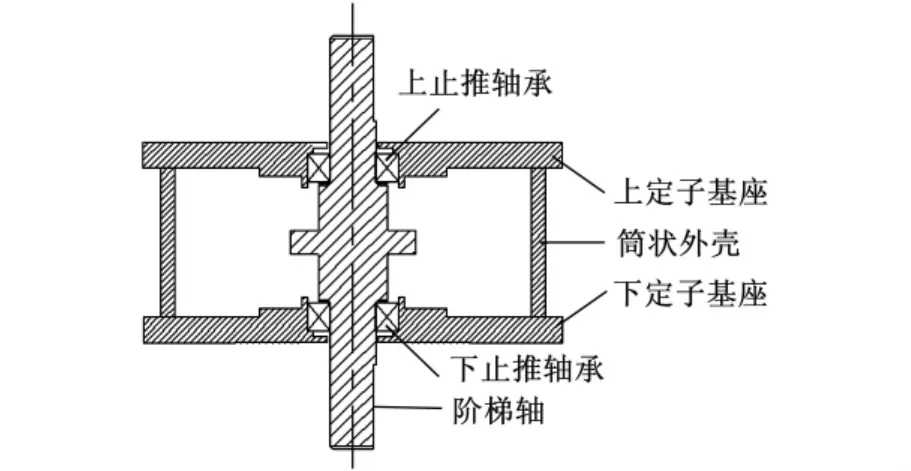
图4 阶梯轴结构的复合夹持机构
图5示出了双定转子TRUSM的完整结构,两组定转子设置在阶梯轴结构的复合夹持机构中,两组定转子间的预压力可分别通过转子与阶梯轴轴环端面之间的调整垫片来调节。
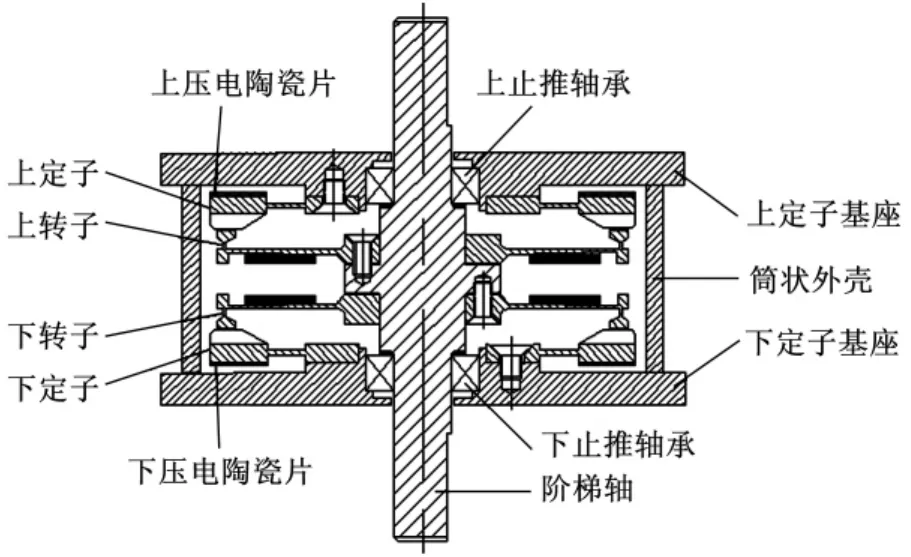
图5 双定转子TRUSM
本文所提出的双定转子TRUSM的转子是柔性的,与单定转子TRUSM的柔性转子结构相同,转子腹板厚度很小,转子较为柔软,这样,一方面,直接通过转子的变形来提供定子、转子之间的稳定预压力,将预压力机构集成到柔性转子上,简化了电机的结构;另一方面,在电机运行时,柔性转子可以随存在周向行波的定子变形而有些变形,增大了TRUSM运行时定转子的实际接触面积,从而提高了电机输出性能。图6是柔性转子TRUSM 的接触示意图[9]。
该双定转子TRUSM在结构上完全保留了柔性转子形式的单定转子TRUSM的驱动特性,理论上可将柔性转子形式的单定转子TRUSM的输出性能提高一倍,由于双定转子TRUSM的结构更加紧凑,因而其输出的能量密度将高于柔性转子形式的单定转子TRUSM的能量输出密度。

图6 柔性转子TRUSM的接触示意图
3 实例分析
为了检验上述结构设计的合理性和性能分析的正确性,以φ60mm型TRUSM为例,制作了两种组合结构的TRUSM实验样机,如图7所示。
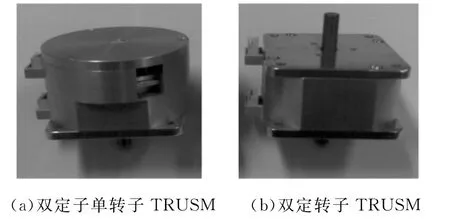
图7 两种组合结构TRUSM的实验样机
在对比实验中,本文参照了已有的两种单定转子TRUSM,表1为实验样机的主要结构参数,其中样机1为刚性转子形式的单定转子TRUSM,样机2为柔性转子形式的单定转子TRUSM,样机3为双定子单转子TRUSM,样机4为双定转子TRUSM。从表1可以看出,样机3由于保留了额外的预压力机构,体积较大,比刚性转子形式单定转子结构的样机1的体积增大了41%,而样机4简化了单定转子TRUSM的圆罩状外壳结构并省掉了外壳内的轴承,使电机结构更加紧凑,其体积仅比柔性转子形式单定转子结构的样机2的体积增大了27%。此外,在材料选用和加工工艺上,所有样机的相应零部件均保持一致。

表1 实验样机的主要结构参数
实验测出了上述四种样机的转矩-转速曲线和转矩-输出功率曲线,其输出性能分别如图8~图11所示。
表2是四种样机输出性能的主要参数。首先,将刚性转子形式单定转子结构的样机1与柔性转子形式单定转子结构的样机2相比较,可以发现,样机1除了空载转速以外,最大转矩、最高功率、转矩密度、功率密度等输出参数均低于样机2的相关参数,因此,总体上来讲,柔性转子接触方式比刚性转子接触方式优越一些。

图8 样机1的实验结果
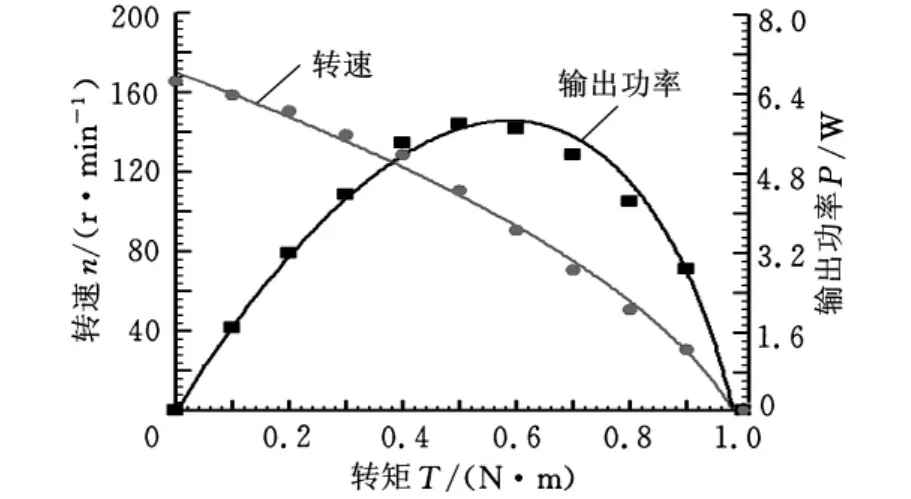
图9 样机2的实验结果
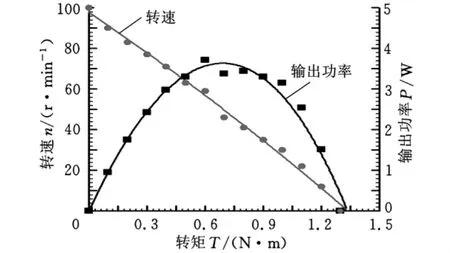
图10 样机3的实验结果
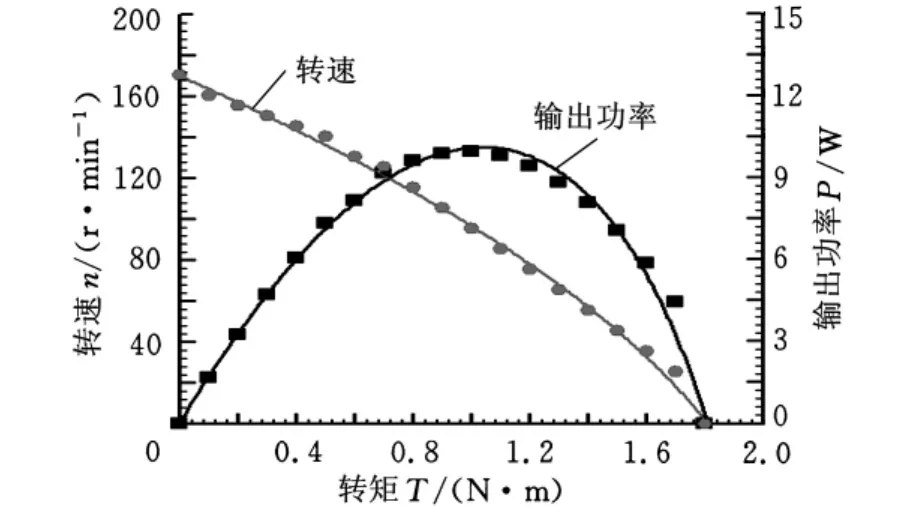
图11 样机4的实验结果
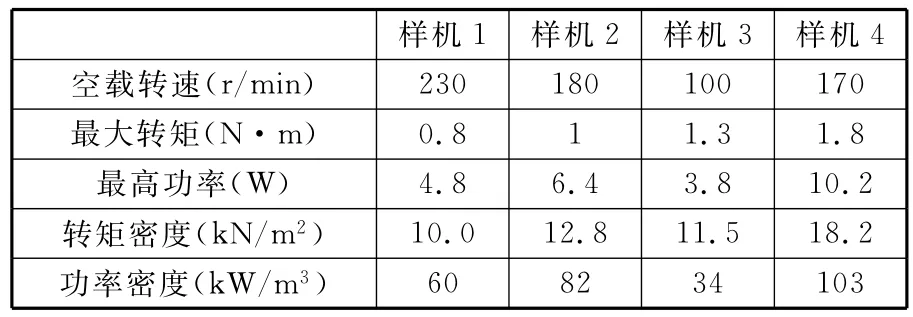
表2 输出性能的主要参数
从实验结果可以看出,样机3采用双定子单转子结构,与刚性转子形式单定转子结构的样机1相比,最大转矩提高了62.5%,而空载转速、最高功率分别下降了56.5%、20.8%,由于预压力机构使双定子单转子TRUSM体积增大较多,样机3的转矩密度比样机1的转矩密度仅提高了15%,而功率密度则下降了43.3%。这表明,双定子单转子TRUSM完全忽略了定转子间的变形匹配,对刚性转子单定转子TRUSM的输出性能提高不多。
比较双定转子结构的样机4和柔性转子形式单定转子结构的样机2可知,样机4除了空载转速略有下降外,最大转矩、最高功率、转矩密度、功率密度均比样机2的相应参数分别提高了80%、59.4%、42.2%、25.6%,这表明,本文所提出的双定转子TRUSM保留了柔性转子形式的单定转子TRUSM的定转子驱动特性,且结构更加紧凑,具有明显的优越性。
4 结论
(1)TRUSM是一种有着广泛应用前景的超声电机,它的研究和试制涉及机械振动和波动、摩擦、材料、电子、超精加工等众多学科的交叉领域。为了进一步满足转矩大、尺寸小等要求,TRUSM的结构组合被证明是一种方便而可行的方法。
(2)鉴于超声电机的发展时间不长,对于超声电机在超声频率微米级波动下的动态接触驱动机理的建模、优化等问题还有待深入研究,本文从定转子间变形匹配的角度分析了组合结构TRUSM输出性能的优劣,并进行了实验验证,该研究有助于理解两种组合结构TRUSM输出特性的差异。
(3)针对TRUSM的基本组合形式——双定子单转子和双定转子,本文提出了两种切实可行的结构设计方案,并进行了实验测试和比较。实验结果表明,两者均能提高TRUSM的输出转矩,其中双定转子TRUSM在输出性能、能量密度等方面均具有明显的优势,本文的研究结果为TRUSM的进一步发展奠定了结构设计的基础。
[1] 赵淳生.超声电机技术与应用[M].北京:科学出版社,2007.
[2] Ueha S,Tomikawa Y,Kurosawa M,et al.Ultrasonic Motors:Theory and Applications[M].Oxford:Oxford Science Publication,1993.
[3] Sashida T,Kenjo T.An Introduction to Ultrasonic Motor[M].Oxford:Clarendon Press,1993.
[4] 曾劲松,姚志远,赵淳生.超声电机中的非线性现象研究[J].中国机械工程,2006,10(5):1047-1051.
[5] 李华峰,辜承林.大转矩行波型超声波电机的研制[J].中国电机工程学报,2002,22(8):67-70.
[6] 张铁民.一种旋转式超声电机:中国,CN1909355A[P].2007-02-17.
[7] Rajagobalan R,Tooru N.A New Method of Improving the Torque of a Travelling Wave Ultrasonic Motor[C]//Proceedings of the 1999IEEE/ASME International Conference on Advanced Intelligent Mechatronics.Atlanta,USA,1999.
[8] 王光庆.行波型超声波电机的若干关键问题研究[D].浙江:浙江大学,2006.
[9] 陈超,赵淳生.柔性转子对行波超声波电动机性能的影响[J].机械工程学报,2008,44(3):152-159.
Experimental Study on Two Combinations of Traveling-wave Rotary Ultrasonic Motors
Yin Yucong Yao Zhiyuan Zhao Chunsheng
Nanjing University of Aeronautics and Astronautics,Nanjing,210016
In order to improve the output performance,two novel TRUSMs(traveling wave rotary ultrasonic motor)with combined structures were designed and implemented.One was the TRUSM with two stators and single rotor,the other was the TRUSM with two stators and two rotors.Based on the structural characteristics,the mechanism that the stator/rotor contact state affected the output performance of these TRUSMs was qualitatively analyzed.In the comparative experiments,it was tested that the TRUSMs with combined structures had incomparable features to the single-statorrotor TRUSMs.Experimental results indicate that the structural combination is an effective way to greatly improve the output performance,and the stator/rotor contact states are very important for the TRUSM performance.
traveling wave rotary ultrasonic motor;combined structure;large torque;high energy density
TM356
1004—132X(2011)01—0084—04
2010—01—14
国家自然科学基金广东联合基金资助重点项目(U0934004)
(编辑 郭 伟)
尹育聪,男,1981年生。南京航空航天大学精密驱动研究所博士研究生。主要研究方向为超声电机技术。发表论文5篇。姚志远,男,1961年生。南京航空航天大学精密驱动研究所副教授。赵淳生,男,1938年生。南京航空航天大学精密驱动研究所教授、博士研究生导师,中国科学院院士。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
数学物理学报(2022年5期)2022-10-09
数学杂志(2022年2期)2022-09-27
中国特种设备安全(2022年4期)2022-07-08
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25